16281035-操作系统实验3
16281035-操作系统实验3
源代码已放进github,请移步查看~
16281035 计科1601
文章目录
- 16281035-操作系统实验3
- 1. 实验目的
- 2. 实验题目
- 题目一
- 解答:
- 问题分析:
- 题目二
- 解答:
- 题目三
- 解答:
- 题目四
- a)
- b)
- c)
- 题目五
- 解答:
- thread.h
- thread.c
- 进程切换的核心函数
- schedule( )详解
- 参考文献
1. 实验目的
- 系统调用的进一步理解。
- 进程上下文切换。
- 同步与通信方法。
2. 实验题目
题目一
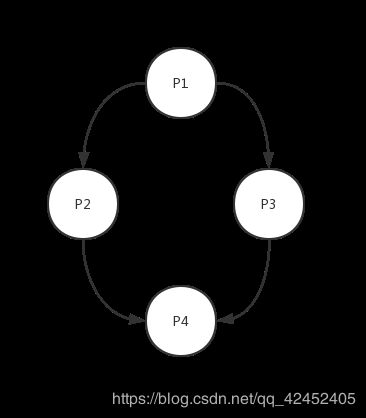
通过fork的方式,产生4个进程P1,P2,P3,P4,每个进程打印输出自己的名字,例如P1输出“I am the process P1”。要求P1最先执行,P2、P3互斥执行,P4最后执行。通过多次测试验证实现是否正确。
解答:
-
将题意实现如图:
-
之前做过用fork产生进程的实验,当时的要求如下:
3. 区别:之前的实验对两个进程之间是否互斥并无要求,现在要求P1最先执行,P2、P3互斥执行,P4最后执行,用到信号量机制。
-
信号量的设计:
-
P1执行完毕后,P2,P3才能执行,所以互斥信号量的值只有1和0。
初始化P1_signal为0.
-
P2,P3以互斥的方式实现,两者都等待wait(P1_signal)。
-
P4在P2和P3都执行完才能执行,所以这时P2执行完应当有一个信号量P2_signal,P3执行完有一个信号量P3_signal,这两个信号量控制P4的执行且互不相同,互相独立。P4需要wait(P2_signal)以及wait(P3_signal)后才可以执行。
-
-
伪代码
Var P1_signal,P2_signal,P2_signal: semphore:=0,0,0; begin parbegin begin P1; signal(P1_signal);end;//P1执行完毕后为其增加一个资源,此后P2、P3竞争。 begin wait(P1_signal); P2; signal(P1_signal);signal(P2_signal); end; //取得信号量的进程消耗一个资源,等待执行完毕后,释放一个资源,供另一个进程执行。 begin wait(P1_signal); P3; signal(P1_signal);signal(P3_signal); end; begin wait(P2_signal);wait(P3_signal);P4;end; parend end -
源代码
#include-
运行结果
运行指令:gcc -o 3-1.out 3-1.c -pthread
一定注意pthread非linux系统的默认库, 需手动链接-线程库 -lpthread,否则会报以下错误:
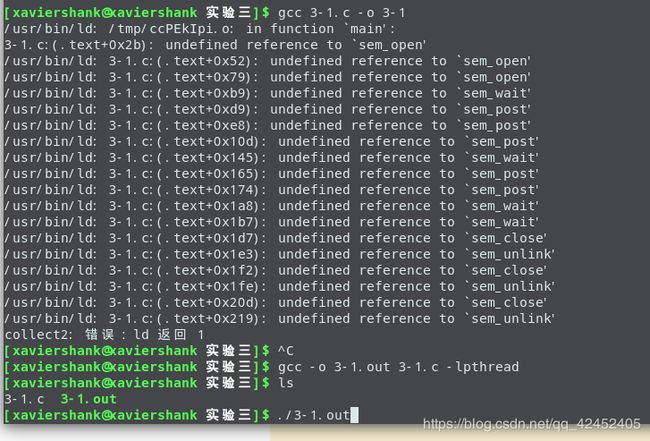
运行结果:

问题分析:
存在问题:每次P2都在P3前运行,似乎P2的竞争力强于P3?我猜想原因是P2线程要比P3早建立,所以有这种问题。
我们让P2 sleep(1)后:
......
sleep(1);
sem_wait(P1_signal);
printf("I am the process P2\n");
sem_post(P1_signal);
sem_post(P2_signal);
......

这样就人为地消除了这个问题。
题目二
火车票余票数ticketCount ,初始值为1000,有一个售票线程,一个退票线程,各循环执行多次。添加同步机制,使得结果始终正确。要求多次测试添加同步机制前后的实验效果。(说明:为了更容易产生并发错误,可以在适当的位置增加一些pthread_yield(),放弃CPU,并强制线程频繁切换,例如售票线程的关键代码:
temp=ticketCount;
pthread_yield();
temp=temp-1;
pthread_yield();
ticketCount=temp;
退票线程的关键代码:
temp=ticketCount;
pthread_yield();
temp=temp+1;
pthread_yield();
ticketCount=temp;
)
解答:
-
售出票线程Sell();
-
退回票线程Return();
-
这两个是互斥事件,一个占用时,另一个必须等待。设置一个信号量flag,初始值为1;
-
伪代码如下:
记录型信号量实现互斥:
Var flag: semaphore :=1; Sell: begin repeat wait(flag); ticketCount = ticketCount-1; signal(flag); until false; end return begin repeat wait(flag); ticketcount = ticketCount+1; signal(flag); until false; end -
源代码
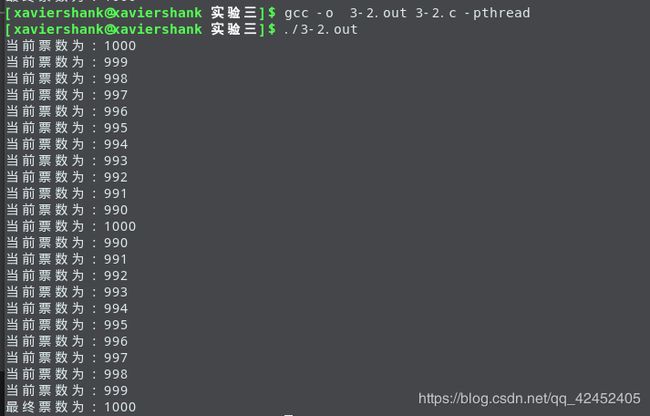
情况一:
未加信号量机制,并且在卖票Sellticket( )的temp写回前加入sched_yield();
猜想:因为票数减少且未及时写回,而退票数目正常,会导致总票数增加:
#include 运行结果:
情况二:
未加信号量机制,并且在退票Returnticket( )的temp写回前加入sched_yield();
猜想:因为票数增加且未及时写回,而卖票数目正常,会导致总票数减少:
运行结果:

情况三:
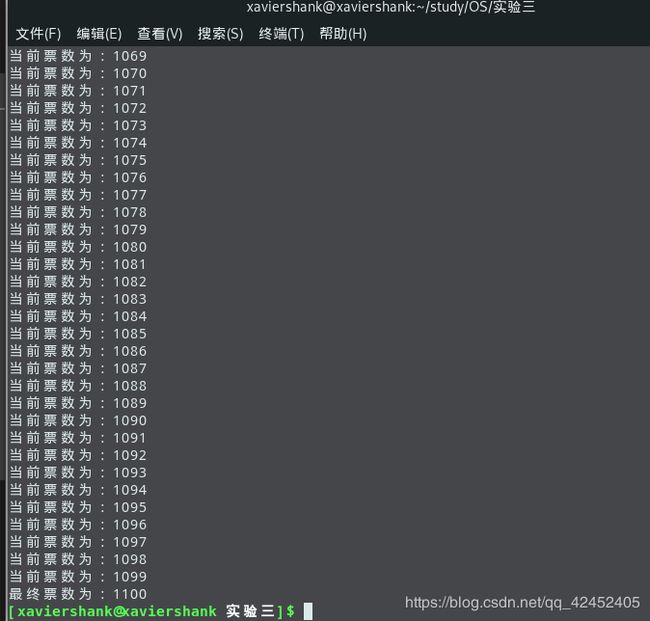
加入信号量机制:
源代码
#include 运行结果:
题目三
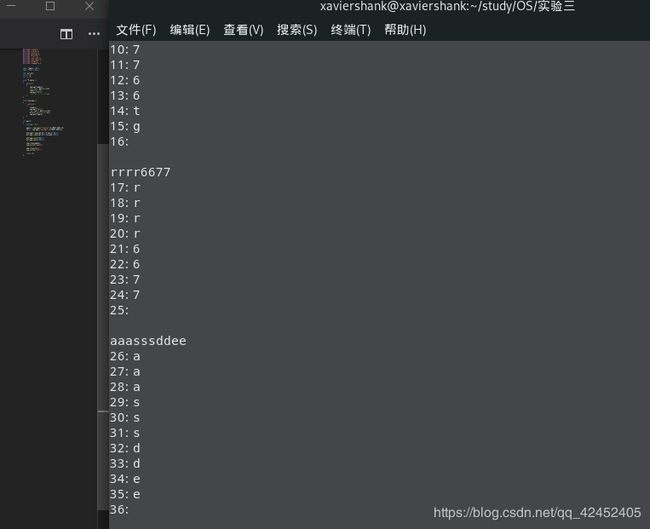
一个生产者一个消费者线程同步。设置一个线程共享的缓冲区,char buf[10]。一个线程不断从键盘输入字符到buf,一个线程不断的把buf的内容输出到显示器。要求输出的和输入的字符和顺序完全一致。(在输出线程中,每次输出睡眠一秒钟,然后以不同的速度输入测试输出是否正确)。要求多次测试添加同步机制前后的实验效果。
解答:
-
输入线程 Producer();
-
输出线程 Consumer();
-
信号量设置:
-
信号量empty,适用于Producer(),查看数组中是否有空位,有则输入。
输入后,signal(full),因为新加入了数据。
对于输入超过数组界限的问题,我采用取模mod10,这样会覆盖前面的内容,但不会产生数组越界的问题。
-
信号量full,适用于Consumer(),查看数组中是否有数据,有则读取,没有则等待。
输出后,signal(empty),读走了数据,增加空位。
-
-
伪代码
Producer Repeat wait(empty); Read and put into buffer; signal(full); Consumer Repeat wait(full); Read from buffer; signal(empty);
#include 运行结果:
题目四
a)
通过实验测试,验证共享内存的代码中,receiver能否正确读出sender发送的字符串?如果把其中互斥的代码删除,观察实验结果有何不同?如果在发送和接收进程中打印输出共享内存地址,他们是否相同,为什么?
-
源代码:
发送者:
/*
* Filename: Sender.c
* Description:
*/
#include 接受者:
/*
* Filename: Receiver.c
* Description:
*/
#include -
实验测试
结论:receiver能正确读出sender发送的字符串。 -
删除代码中的互斥部分:
删除代码中的互斥部分,即删除信号量后发现,receiver在不停地读共享内存,并且速度很快,会出现重复读的现象。
-
打印输出共享内存地址
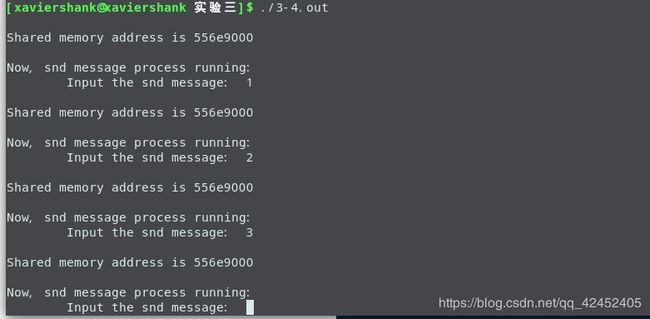
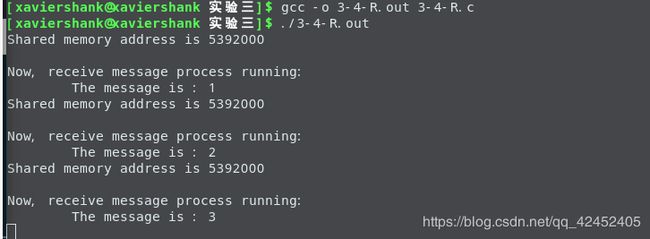
sender和receiver的共享内存地址竟然不同!为什么呢?我的理解是因为操作系统给进程分配的是虚拟内存,相应每个进程会有自己的虚拟内存分配地址。又因为运行的两个进程在初始化的时候使用了shmat函数,此函数的作用是将共享内存空间挂载到进程中就是对进程的虚拟内存映射到共享内存的物理内存,从而实现内存的共享。所以虽然我们打印出来的内存地址不一样,但是它们实际映射的物理内存地址是一样的。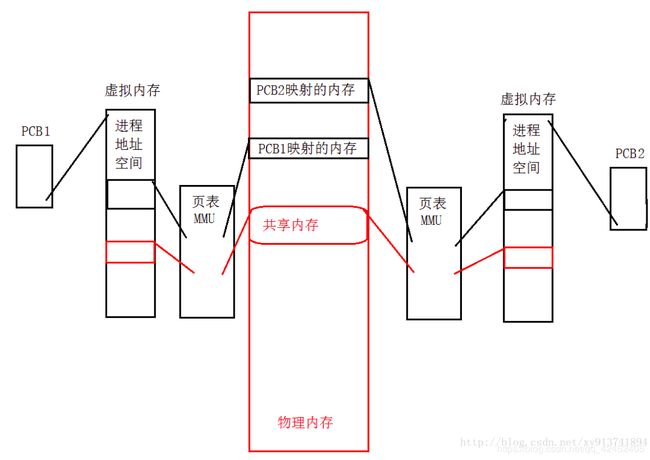
b)
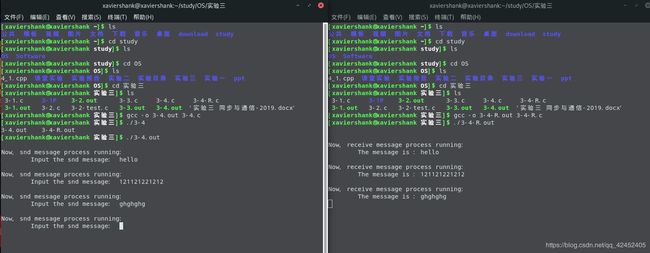
有名管道和无名管道通信系统调用是否已经实现了同步机制?通过实验验证,发送者和接收者如何同步的。比如,在什么情况下,发送者会阻塞,什么情况下,接收者会阻塞?
-
源代码
-
无名管道 pipe.c
多用于亲缘关系进程间通信,方向为单向;为阻塞读写;通信进程双方退出后自动消失
/* * Filename: pipe.c */ #include#include //for pipe() #include //for memset() #include //for exit() int main() { int fd[2]; char buf[20]; if(-1 == pipe(fd)) { perror("pipe"); exit(EXIT_FAILURE); } write(fd[1], "hello,world", 12); memset(buf, '\0', sizeof(buf)); read(fd[0], buf, 12); printf("The message is: %s\n", buf); return 0; } -

由实验结果可见,无名管道通信实现了同步机制。
-
有名管道
fifo_sen.c
有名管道也实现了同步机制:
对于以只读方式(O_RDONLY)打开的FIFO文件,如果open调用是阻塞的(即第二个参数为O_RDONLY),除非有一个进程以写方式打开同一个FIFO,否则它不会返回;如果open调用是非阻塞的的(即第二个参数为O_RDONLY | O_NONBLOCK),则即使没有其他进程以写方式打开同一个FIFO文件,open调用将成功并立即返回。
对于以只写方式(O_WRONLY)打开的FIFO文件,如果open调用是阻塞的(即第二个参数为O_WRONLY),open调用将被阻塞,直到有一个进程以只读方式打开同一个FIFO文件为止;如果open调用是非阻塞的(即第二个参数为O_WRONLY | O_NONBLOCK),open总会立即返回,但如果没有其他进程以只读方式打开同一个FIFO文件,open调用将返回-1,并且FIFO也不会被打开。
以下是对实验的验证:
/*
*File: fifo_send.c
*/
#include fifo_rev.c
/*
*File: fifo_rcv.c
*/
#include 

c)
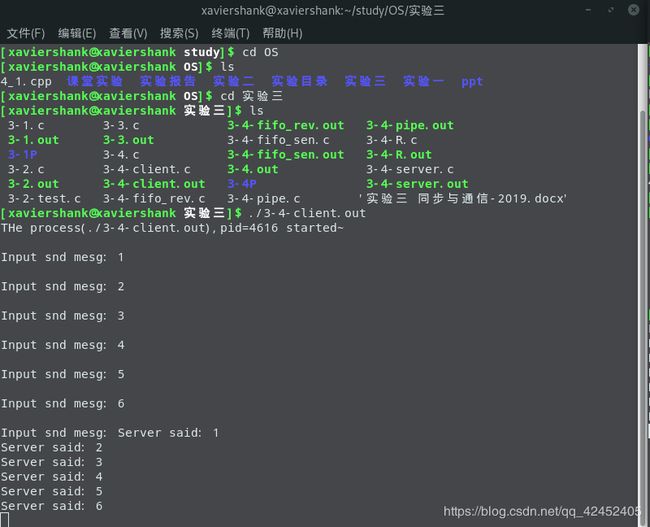
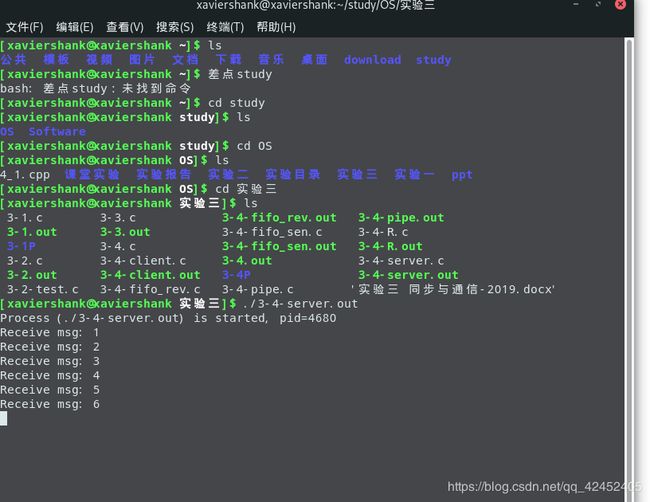
消息通信系统调用是否已经实现了同步机制?通过实验验证,发送者和接收者如何同步的。比如,在什么情况下,发送者会阻塞,什么情况下,接收者会阻塞?
-
源代码(实验验证)
-
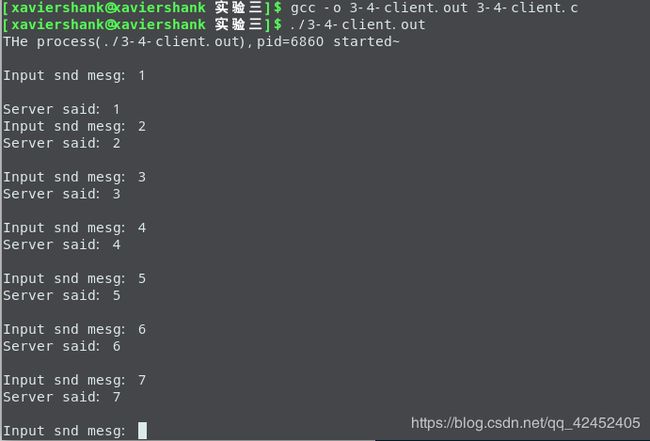
client.c
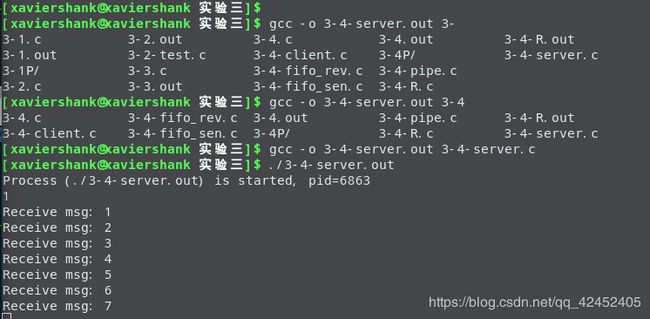
#include - server.c
#include 2.运行结果
-
验证阻塞?
在此机制中,发送端传送的消息都会加入一个消息队列。写进程在此机制中不会被阻塞,其写入的字符串会一直被添加至队列的末端,而读进程会从队列的首端一直读取消息,消息节点一旦被读取便会移除队列。当队列中不含其需要类型的消息时便会阻塞。
为验证我们的阻塞规则,可以先只开启客户端进行多条信息传输,再开启服务端观察结果。

题目五
阅读Pintos操作系统,找到并阅读进程上下文切换的代码,说明实现的保存和恢复的上下文内容以及进程切换的工作流程。
解答:
thread.h
在thread.h中寻找关于进程的相关代码:
#ifndef THREADS_THREAD_H
#define THREADS_THREAD_H
#include "threads/synch.h"
#include (1) Pintos中定义了一个thread的结构体用于存储线程的信息(包括优先级和状态),就在以上的代码thread.h中。
四个状态:
enum thread_status
{
THREAD_RUNNING, /* Running thread. */
THREAD_READY, /* Not running but ready to run. */
THREAD_BLOCKED, /* Waiting for an event to trigger. */
THREAD_DYING /* About to be destroyed. */
};
/* Thread identifier type.
You can redefine this to whatever type you like. */
(2) thread结构体
struct thread
{
/* Owned by thread.c. */
tid_t tid; /* Thread identifier. */
enum thread_status status; /* Thread state. */
char name[16]; /* Name (for debugging purposes). */
uint8_t *stack; /* Saved stack pointer. */
int priority; /* Priority. */
int64_t wakeup_time; /* Thread wakeup time in ticks. */
struct semaphore timer_sema;
struct list_elem timer_elem; /* List element for timer_wait_list. */
/* Thread statistics. */
int niceness;
fp_t recent_cpu;
struct list_elem allelem; /* List element for all threads list. */
/* Shared between thread.c and synch.c. */
struct list_elem elem; /* List element. */
#ifdef USERPROG
/* Owned by userprog/process.c. */
uint32_t *pagedir; /* Page directory. */
#endif
/* Owned by thread.c. */
unsigned magic; /* Detects stack overflow. */
}
thread.c
在这个文件中寻找thread的基本操作(函数):
-
thread_block()用于将current_thread 终止变成blocked状态,不能跑,只有在调用
-
thread_unblock()后进入就绪队列。
-
thread_yield()用于直接把current_thread进入就绪队列,在任意时刻可再次被调用。
list_entry返回一个线程。 -
idle_thread平常是不在ready_list中的。
1.在thread_start()即系统刚开始时,idle_thread在ready_list中。
2.在ready_list为空时,调用idle_thread。
idle() 在thread_start调用
{
1.把初始化为0的信号量设为1,即将idle_thread放入就绪队列。
2.把idle_thread的状态设为blocked。
}
- running_thread()返回一个running thread
- thread_current()是加上一个check的running_thread
- init_thread()
{
1.初始化thread
2.状态设为blocked
3.把栈的空间变小
4.magic值
5.放入all_list
} - next_thread_to_run()
{
是否就绪队列为空?返回idle_thread:返回就绪队列的第一个,并移除
} - thread_schedule_tail(prev)
{
current_thread的thread_tick清0
激活process
如果prev已经dying,则销毁。
} - schedule()
{
调用这个的函数是thread_block,thread_exit,thread_yield.因为前提是current_thread状态不能是running。
}
进程切换的核心函数
其中最重要的是schedule( )这个函数,它专门负责线程切换,执行了以后会把当前线程放进队列里并调度下一个线程。
schedule( )详解
/* Schedules a new process. At entry, interrupts must be off and
the running process's state must have been changed from
running to some other state. This function finds another
thread to run and switches to it.
It's not safe to call printf() until thread_schedule_tail()
has completed. */
static void
schedule (void)
{
struct thread *cur = running_thread ();
struct thread *next = next_thread_to_run ();
struct thread *prev = NULL;
ASSERT (intr_get_level () == INTR_OFF);
ASSERT (cur->status != THREAD_RUNNING);
ASSERT (is_thread (next));
if (cur != next)
prev = switch_threads (cur, next);
thread_schedule_tail (prev);
}
-
发现有三个thread结构体的指针,cur指向正在运行的线程的返回值,next指向下一个要运行的线程这个函数的返回值。
-
再看schedule ();的后半部分,调用switch_threads (cur, next)将当前进程和下一个进程进行切换。此函数用汇编编写,存放在siwth.S中。这是将当前堆栈的指针保存到cur线程的堆栈,接着从next线程的堆栈中恢复当前堆栈的指针,也就是寄存器esp的操作。由此我们可以确定进程的保存与恢复就是利用CPU栈顶指针的变化进行的,进程的状态则是保存在自身的堆栈当中。
#include "threads/switch.h" #### struct thread *switch_threads (struct thread *cur, struct thread *next); #### #### Switches from CUR, which must be the running thread, to NEXT, #### which must also be running switch_threads(), returning CUR in #### NEXT's context. #### #### This function works by assuming that the thread we're switching #### into is also running switch_threads(). Thus, all it has to do is #### preserve a few registers on the stack, then switch stacks and #### restore the registers. As part of switching stacks we record the #### current stack pointer in CUR's thread structure. .globl switch_threads .func switch_threads switch_threads: # Save caller's register state. # # Note that the SVR4 ABI allows us to destroy %eax, %ecx, %edx, # but requires us to preserve %ebx, %ebp, %esi, %edi. See # [SysV-ABI-386] pages 3-11 and 3-12 for details. # # This stack frame must match the one set up by thread_create() # in size. pushl %ebx pushl %ebp pushl %esi pushl %edi # Get offsetof (struct thread, stack). .globl thread_stack_ofs mov thread_stack_ofs, %edx # Save current stack pointer to old thread's stack, if any. movl SWITCH_CUR(%esp), %eax movl %esp, (%eax,%edx,1) # Restore stack pointer from new thread's stack. movl SWITCH_NEXT(%esp), %ecx movl (%ecx,%edx,1), %esp # Restore caller's register state. popl %edi popl %esi popl %ebp popl %ebx ret .endfunc -
thread_schedule_tail (prev) 这个函数通过激活新线程的页表来完成线程切换。
void
thread_schedule_tail (struct thread *prev)
{
struct thread *cur = running_thread ();
ASSERT (intr_get_level () == INTR_OFF);
/* Mark us as running. */
cur->status = THREAD_RUNNING;
/* Start new time slice. */
thread_ticks = 0;
#ifdef USERPROG
/* Activate the new address space. */
process_activate ();
#endif
/* If the thread we switched from is dying, destroy its struct
thread. This must happen late so that thread_exit() doesn't
pull out the rug under itself. (We don't free
initial_thread because its memory was not obtained via
palloc().) */
if (prev != NULL && prev->status == THREAD_DYING && prev != initial_thread)
{
ASSERT (prev != cur);
palloc_free_page (prev);
}
}
参考文献
作者:xiazdong
来源:CSDN
原文:https://blog.csdn.net/xiazdong/article/details/6327840