MATLAB R2020a新鲜出炉,我来替各位尝尝鲜!
01
MATLAB的重要性
为什么要强调MATLAB的重要性?
不管是在学术界还是工业界,MATLAB无论从应用广度,及受众满意度得分都非常高,究其原因,无外乎以下几点:
简单上手,谁用谁知道。
在学术界,并非每个人都是计算类专业出身,当计算机编程语言学习的不多,但又需要处理科学研究中的大量实验数据时,使用其他编程语言就相对较为困难。
这时,不同于其他需要编写底层逻辑语言,且编程逻辑与人们进行计算的思路和表达方式都大体相同的MATLAB就显得额外亲切。
这对于非计算机类的朋友而言,是十分友善的存在。
业内流传已久的捷径黑科技MATLAB已经成为本科、硕博士,必须使用的研究工具之一。
而在工业界,如果你是工程师,在工程应用这一块,就更广了,机器人、通信、嵌入式、图像处理等功能应有尽有。
有朋友用MATLAB写了一个爬虫的程序,获取了智联招聘平台上关于MATLAB的四千多条招聘信息,获取关键词如下图:
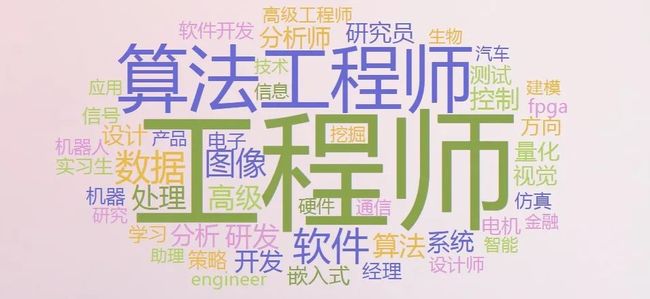
薪资待遇呢?
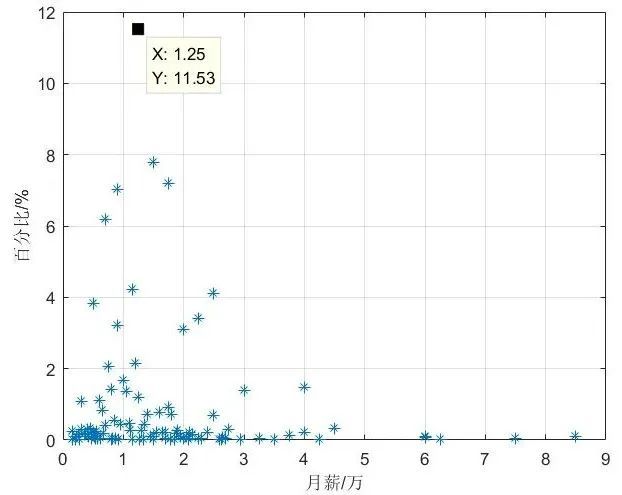
MATLAB简单易学,降低用户的数学基础和计算机编程语言的要求,具有友好的工作平台和编程环境,涵盖了近600个工程中需要用到数学处理函数,强大的计算机数据处理能力。用来做大数据处理,建模仿真等。
开挂仿真+多硬件平台支持
除开MATLAB编程,还有一个还有“变态”般存在的Simulink工具箱。
拖出我们需要的功能模块,按照个人需求连接各个模块,设置好参数,无需编程,即可快速搭建各个系统模型。
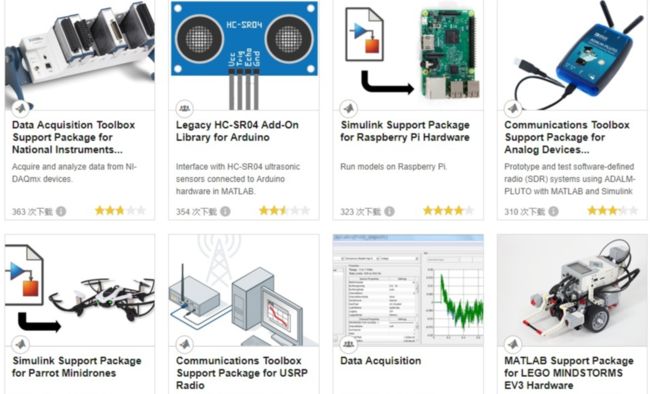
当然,这些都是一些程序软件上的,还有一个更有趣的,MATLAB的硬件支持包MATLAB/Simulink Support Package!
更是让人冲上云霄。
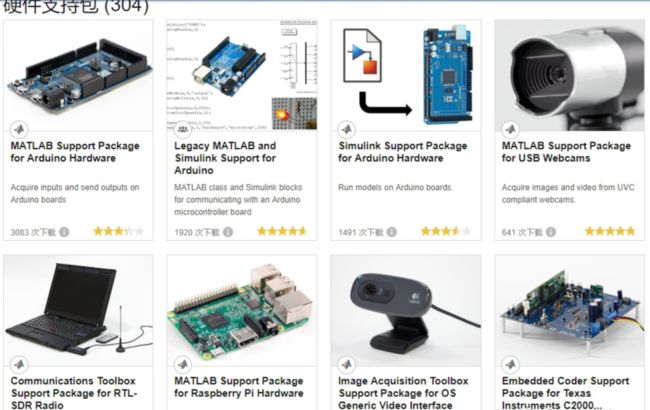

如上图所示,这就意味着,我们可以在MATLAB中配置好Simulink仿真模型,然后结合MATLAB中的STM32芯片的器件支持包,通过STM32CubeMX的联用,实现了芯片配置,最后转换为完整的C代码文件。
02
MATLAB在机器人中的应用
近年AI(人工智能)技术、机器人技术飞速发展,MATLAB怎么能落伍。为了给用户提供多维度的技术提升,今年MATLAB R2020a上线升级多多功能。

增加了人工智能,深度学习,机器人控制和规划等的工具箱,其中包括机器人运动控制,路径规划,感知,SLAM等等方面的工具。就我个人而言,本职是做机器人控制这一块的。
在机器人应用这块,MATLAB对于初学者更是十分友好,提供了足够多的工具箱。不管是运动控制还是路径规划。
亦或是视觉SLAM等等。而在机器人控制中,路径规划是机器人完成各种任务的基础,一直也是业界研究的热点,之前版本的MATLAB也有相关的涉及。
非常喜闻乐见的是,最近发布的MATLAB R2020a在这块也有新的突破:添加了多个路径规划函数,可供用户直接进行调用,修改系统的一些控制参数即可完成路径规划系统的搭建,快速完成实验仿真或工业设计。
03
关于机器人运动规划
在路径规划的研究上,学术界研究人员提出了许多规划方法:如人工势场法、单元分解法、随机路标图(PRM)法、快速搜索树(RRT)法等。
机器人运动规划的基本任务可以描述为:从开始位置到目标位置的运动。
这一任务通常涉及到两项基本问题:
1、如何躲避构型空间中出现的障碍物(几何路径规划)
2、如何满足机器人本身在机械、传感方面的速度、加速度等限制(不确定性、反馈、微分约束等)
其中,基于抽样的运动规划算法是用于解决第1个问题的重要方法,其核心思想为:先对机器人的单个构型进行碰撞检测,建立无碰撞构型的数据库,再对不同的构型进行采样以生成无碰撞路径。
该算法的优点在于具有通用性,只需要针对不同的机器人运动规划问题进行合理的参数调整。
该算法的缺点在于完备性较弱,即当参数设置不合理时,即使存在可行的路径,也不一定能够找到。
典型的抽样规划方法有综合查询方法和单一查询方法两类。
前者首先构建路线图,先通过采样和碰撞检测建立完整的无向图,以得到构型空间的完整连接属性。再通过图搜索即可得到可行的路径。
后者则从特定的初始构型出发局部建立路线图,在构型空间中延伸树型数据结构,最终使它们相连。
04
举个例子
传统的人工势场、单元分解法需要对空间中的障碍物进行精确建模,当环境中的障碍物较为复杂时,将导致规划算法计算量较大。
基于随机采样技术的PRM法可以有效解决高维空间和复杂约束中的路径规划问题。
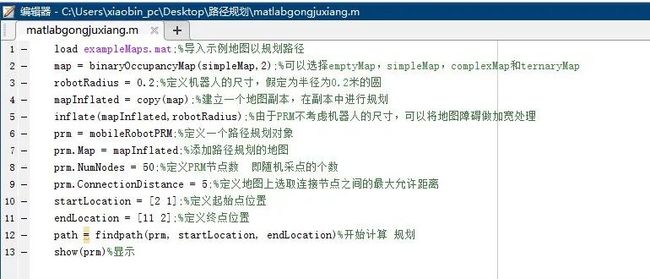
本文以MATLAB R2020a,结合PRM算法进行一个路径规划的仿真。
*值得一提的是,更新后的MATLAB,可以直接调用PRM函数,而不需要用户再去进行PRM算法程序的编写,可以让用户快速完成简单路径规划的仿真,
只需要13行代码就可以实现,如下图所示:
仿真结果如下所示(动图):

总之,MATLAB R2020a真的香,各位看官着实得亲自尝尝鲜呐!
了解更多机器人解决方案:(复制到浏览器打开)
https://ww2.mathworks.cn/solutions/robotics.html?s_eid=PEP_23450
你可以申请30天免费试用工具包:(复制到浏览器打开)
https://ww2.mathworks.cn/campaigns/products/trials.html?s_eid=PEP_23450
-------------------------------
原创不易,莫要白票,如果觉得有点用的话,请毫不留情地转发朋友圈吧,因为这将是我写更多优质文章的最强动力。