有选择保边缘平滑法对图像进行平滑
-
转载注明出处
{
@ANTenna
https://blog.csdn.net/m0_38139098/article/details/105755329
} -
要求:编写一个程序完成如下功能:读入清晰图像,加上椒盐噪声,采用有选择保边缘平滑法对图像进行平滑。
-
该平滑方法可以保护边沿,具体原理见各种参考书和博客。最关键的地方在于边沿处方差较大。本帖主要是分享一下代码
-
Python Implement
'''
# 8th
编写一个程序完成如下功能:读入清晰图像,加上椒盐噪声
采用--有选择保边缘平滑法--对图像进行平滑。
'''
import numpy as np
from PIL import Image
import matplotlib.pyplot as plt
from skimage.util import random_noise
# 读入清晰图像
#einstein.tif
#lena512color.jpg
#mandril_color.jpg
#cameraman.tif
src = Image.open("einstein.tif").convert('L') # 转换成灰度
src = np.array(src)
'''
加入椒盐噪声
输入:清晰灰度图
返回:噪声污染图
'''
def addnoise(img):
print("addnoise is running ...")
# 随机生成5000个椒盐点
rows, cols = img.shape
for i in range(5000):
x = np.random.randint(0, rows)
y = np.random.randint(0, cols)
img[x, y, :] = 255
output = img
return output
'''
平滑滤波器:有选择保边缘平滑法
按照PPT 处理5*5邻域
输入:清晰灰度图\methord 为填充方案\可选zero or replicate
返回:滤波后的图像
'''
def filter(img,methord):
# 核大小 5*5
kernel_lenth = 5
rect_kernel_lenth = 3 # 3*3 kernel size
b = np.array(img)
# 读取原始矩阵大小
line_0, col_0 = b.shape
print("Ori_size:", b.shape)
# 创建输出画布 全零阵
output = np.zeros((line_0 + 2 * (kernel_lenth - 1), col_0 + 2 * (kernel_lenth - 1)))
# 填充边界
if (methord == "zero"):
# 填0 先填充行,加两行后填充列
for i in range(kernel_lenth - 1):
line, col = b.shape # Updata Matrix size
b = np.insert(b, 0, np.zeros(col), axis=0)
b = np.insert(b, line + 1, np.zeros(col), axis=0)
b = np.insert(b, 0, np.zeros(line + 2), axis=1)
b = np.insert(b, col + 1, np.zeros(line + 2), axis=1)
# 0填充完毕
elif (methord == "replicate"):
# 填边界值
# 先行后列,这样不必专门处理角点
for i in range(kernel_lenth - 1): # kernel_lenth
line, col = b.shape # Updata Matrix size
side_up = b[:1]
side_down = b[line - 1:line]
b = np.insert(b, 0, side_up, axis=0)
b = np.insert(b, line + 1, side_down, axis=0)
side_left = b[:, 0] # 提取某一列
side_right = b[:, col - 1]
b = np.insert(b, 0, side_left, axis=1)
b = np.insert(b, col + 1, side_right, axis=1)
# 复制填充完毕
#print("expsize:", b.shape) # to 5*5 Size OK!
# 5*5填充后对于5边形和6边形是友善的
line, col = b.shape # Updata Matrix size
# 3*3 矩形区域计算 为了简化逻辑,该部分与其它(5*5)区域分立
for i in range(2,line-2): # kernel center x
for j in range(2,col-2): # kernel center y slide
# 对于每个像素建立2*1的均值方差表 每次清零
var_list = [[],[],[]] # 0- 3; 5 6
mean_list = [[],[],[]] # 0- 3; 5 6
# 提取欲处理的<9>个子区域
# 3*3
mask_temp_3 = b[i-1:i+2,j-1:j+2] # 3*3的就这样提取出来了 notice that 要到3*3 即0-2 ,后面的要取到3
var_list[0].append(np.var(mask_temp_3))
mean_list[0].append(np.mean(mask_temp_3))
local_var1 = []
local_mean1 = []
local_var2 = []
local_mean2 = []
# 5*5
mask_temp_5 = b[i-2:i+3, j-2:j+3]
# 1
list51 = [mask_temp_5[2][2],mask_temp_5[1][1],mask_temp_5[0][1],mask_temp_5[0][3],mask_temp_5[1][3],mask_temp_5[1][2],mask_temp_5[0][2]]
list52 = [mask_temp_5[2][2],mask_temp_5[1][3],mask_temp_5[1][4],mask_temp_5[2][4],mask_temp_5[3][4],mask_temp_5[3][3],mask_temp_5[2][3]]
list53 = [mask_temp_5[2][2],mask_temp_5[3][3],mask_temp_5[4][3],mask_temp_5[4][2],mask_temp_5[4][1],mask_temp_5[3][1],mask_temp_5[3][2]]
list54 = [mask_temp_5[2][2],mask_temp_5[3][1],mask_temp_5[3][0],mask_temp_5[2][0],mask_temp_5[1][0],mask_temp_5[1][1],mask_temp_5[2][1]]
local_var1.append(np.var(list51))
local_var1.append(np.var(list52))
local_var1.append(np.var(list53))
local_var1.append(np.var(list54))
#
local_mean1.append(np.mean(list51))
local_mean1.append(np.mean(list52))
local_mean1.append(np.mean(list53))
local_mean1.append(np.mean(list54))
# 2
list61 = [mask_temp_5[2][2],mask_temp_5[2][3],mask_temp_5[4][3],mask_temp_5[4][4],mask_temp_5[4][3],mask_temp_5[3][2],mask_temp_5[4][4]]
list62 = [mask_temp_5[2][2],mask_temp_5[3][2],mask_temp_5[4][1],mask_temp_5[4][0],mask_temp_5[3][0],mask_temp_5[2][1],mask_temp_5[3][1]]
list63 = [mask_temp_5[2][2],mask_temp_5[2][1],mask_temp_5[1][0],mask_temp_5[0][0],mask_temp_5[0][1],mask_temp_5[1][2],mask_temp_5[1][1]]
list64 = [mask_temp_5[2][2],mask_temp_5[1][2],mask_temp_5[0][3],mask_temp_5[0][4],mask_temp_5[1][4],mask_temp_5[2][3],mask_temp_5[1][3]]
local_var2.append(np.var(list61))
local_var2.append(np.var(list62))
local_var2.append(np.var(list63))
local_var2.append(np.var(list64))
local_mean2.append(np.mean(list61))
local_mean2.append(np.mean(list62))
local_mean2.append(np.mean(list63))
local_mean2.append(np.mean(list64))
min_var_temp = 0
for m in range(4): # 迭代查找5*5的最小方差 对应的均值
if(local_var1[m]>local_var2[m]):
mean_value = local_mean2[m]
min_var_temp = local_var2[m]
else:
mean_value = local_mean1[m]
min_var_temp = local_var1[m]
# 找到包含3*3方差在内的最小方差位置
# 根据索引找到对应的均值
if(var_list[0][0]>min_var_temp): # 3的大 不取3
output[i][j] = mean_value
else:
output[i][j] = mean_list[0][0]
#output[i][j] = real_mean
#print("Running...",i)
# 裁剪
output = output[kernel_lenth-1:line-kernel_lenth+1,kernel_lenth-1:col-kernel_lenth+1]
#print("outputsize:",output.shape)
return output
# Run to test
noise_img = random_noise(src, mode='s&p',amount=0.3)
filter_img = filter(noise_img,"zero")
filter_img2 = filter(noise_img,"replicate")
#print(filter_img)
src_dim1 = src.flatten()
noise_dim1 = noise_img.flatten()
filter_img_dim1 = filter_img.flatten()
filter_img_dim2 = filter_img2.flatten()
# 显示灰度图
plt.subplot(241), plt.imshow(src, 'gray'), plt.title('Src')
plt.axis('off')
plt.subplot(242), plt.imshow(noise_img, 'gray'), plt.title('NoiseImg')
plt.axis('off')
plt.subplot(243), plt.imshow(filter_img, 'gray'), plt.title('FilterImg_0')
plt.axis('off')
plt.subplot(244), plt.imshow(filter_img2, 'gray'), plt.title('FilterImg_copy')
plt.axis('off')
plt.subplot(245)
plt.title('SrcImg Hist')
n, bins, patches = plt.hist(src_dim1, bins=80, density=0, edgecolor='black', alpha=1, histtype='bar')
plt.subplot(246)
plt.title('NoiseImg Hist')
n, bins, patches = plt.hist(noise_dim1, bins=80, density=0, edgecolor='black', alpha=1, histtype='bar')
plt.subplot(247)
plt.title('FilterImg_0 Hist')
n, bins, patches = plt.hist(filter_img_dim1, bins=80, density=0, edgecolor='black', alpha=1, histtype='bar')
plt.subplot(248)
plt.title('FilterImg_copy Hist')
n, bins, patches = plt.hist(filter_img_dim2, bins=80, density=0, edgecolor='black', alpha=1, histtype='bar')
plt.show()
# Liu Yaohua - 2019.10.31 in UCAS
-
效果展示
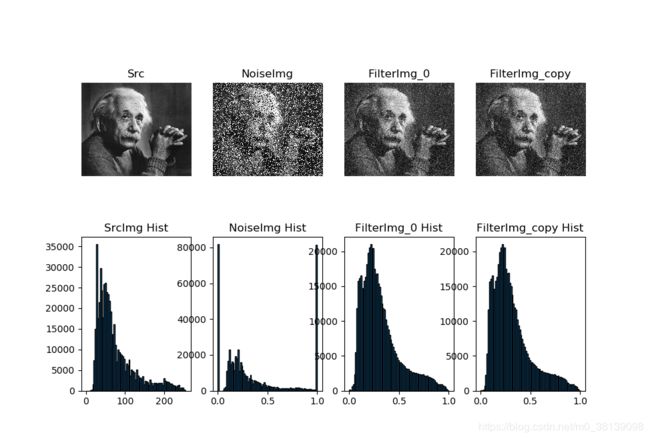
总结:可以看出,该算法可以对椒盐噪声形成有效抑制,有很高的实用价值