verilog时钟分频设计
1.偶分频模块设计
偶分频意思是时钟模块设计最为简单。首先得到分频系数M和计数器值N。
M = 时钟输入频率 / 时钟输出频率
N = M / 2
如输入时钟为50M,输出时钟为25M,则M=2,N=1。偶分频则意味着M为偶数。
以M=4,N=2为例,我们希望得到的输出时钟时序如下:

因此只需要将counter以clk_in为时钟驱动计数,当counter = (N-1)时,clk_out翻转即可。
verilog代码如下,其中WIDTH为(N的位宽-1):
module time_adv_even #(
parameter N = 2,
WIDTH = 7
)
(
input clk,
input rst,
output reg clk_out
);
reg [WIDTH:0]counter;
always @(posedge clk or posedge rst) begin
if (rst) begin
// reset
counter <= 0;
end
else if (counter == N-1) begin
counter <= 0;
end
else begin
counter <= counter + 1;
end
end
always @(posedge clk or posedge rst) begin
if (rst) begin
// reset
clk_out <= 0;
end
else if (counter == N-1) begin
clk_out <= !clk_out;
end
end
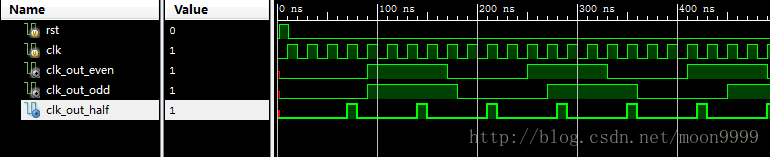
endmoduletestbench测试8分频即N=4,ISE仿真结果如下:

2.奇分频模块设计
奇分频需要通过两个时钟共同得到。首先得到分频系数M和计数器值N。
M = 时钟输入频率 / 时钟输出频率
N = (M-1) / 2
如输入时钟为50M,输出时钟为10M,则M=5,N=2。奇分频则意味着M为奇数。以M=5,N=2为例,我们希望得到的输出时钟时序如下:
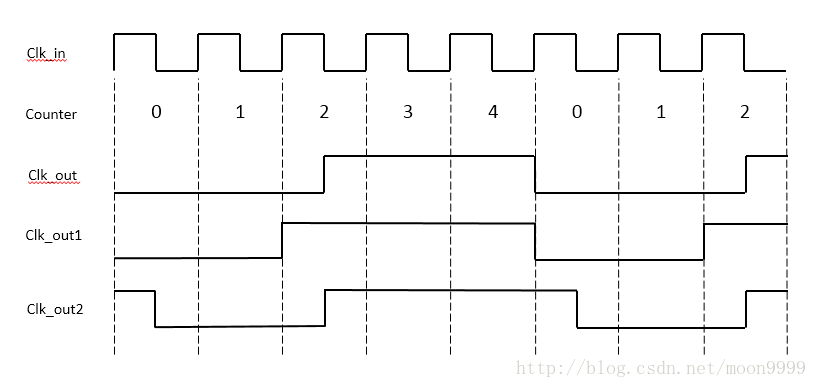
其中clk_out为最终输出时钟,clk_out1和clk_out2为辅助时钟生成。
计数器counter由0技术至(M-1)。
clk_out1在在clk_in的上升延跳变,条件是counter==(N-1)或(M-1)。
clk_out2在在clk_in的下降延跳变,条件是counter==(N-1)或(M-1)。
之后clk_out = clk_out1 & clk_out2即可得到M分频的时钟。
verilog代码如下,其中WIDTH为(N的位宽-1):
module time_adv_odd #(
parameter N = 2,
WIDTH = 7
)(
input clk,
input rst,
output clk_out
);
reg [WIDTH:0]counter;
always @(posedge clk or posedge rst) begin
if (rst) begin
// reset
counter <= 0;
end
else if (counter == (N << 1)) begin
counter <= 0;
end
else begin
counter <= counter + 1;
end
end
reg clk_out1;
always @(posedge clk or posedge rst) begin
if (rst) begin
// reset
clk_out1 <= 0;
end
else if (counter == N-1) begin
clk_out1 <= !clk_out1;
end
else if (counter == (N << 1)) begin
clk_out1 <= !clk_out1;
end
end
reg clk_out2;
always @(negedge clk or posedge rst) begin
if (rst) begin
// reset
clk_out2 <= 0;
end
else if (counter == N-1) begin
clk_out2 <= !clk_out2;
end
else if (counter == (N << 1)) begin
clk_out2 <= !clk_out2;
end
end
assign clk_out = clk_out1 & clk_out2;
endmodule
3.半分频模块设计
半分频即2.5分频等,设计最为复杂。首先得到分频系数M:
M = 时钟输入频率 / 时钟输出频率
如输入为50M,输入为20M则分频系数为2.5。此次设计未能完成占空比为50%的半分频。
以M=2.5为例,我们希望得到的输出时钟时序如下:
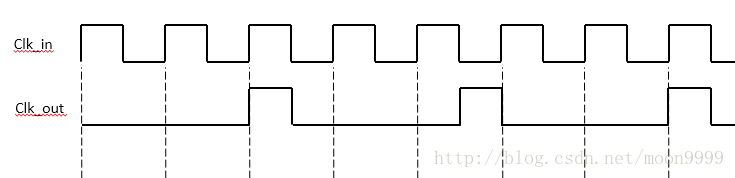
可以看出输出时钟的两个上升沿之间为2.5个输入时钟周期。
设计的关键在于信号维持半个周期的处理,因此引入了辅助信号clk_cnt,clk_vld。
clk_vld信号受到clk_out的驱动,检测到clk_out的上升沿时,信号翻转。
clk_cnt信号受到clk_in驱动,受clk_vld控制,当clk_vld==0时,clk_cnt = clk_in;当clk_vld==1时,clk_cnt = !clk_in。
counter信号受clk_cnt驱动,计数(M-0.5)时归零。
clk_out信号受clk_cnt驱动,当counter == (M-1.5)或counter == (M-0.5)时翻转。(此处在仿真时做了改变,见下方)
M=2.5时,时序分析如下:
第一步:reset之后,clk_vld==0,clk_cnt = clk_in,counter由0开始计数;
第二步:counter == 1时,clk_out在clk_cnt的上升沿处跳变为1,引起clk_vld->1,进而clk_cnt = !clk_in,这意味着clk_cnt立即由1归为0;
第三步:半个周期后,clk_cnt 在此迎来上升沿,此时counter == 2,clk_out在clk_cnt的上升沿处跳变为0,counter也归0;(实现了信号维持半个周期)
第四步:继续正常计数,counter == 1时,clk_out在clk_cnt的上升沿处跳变为1,引起clk_vld->0,进而clk_cnt = clk_in,这意味着clk_cnt立即由1归为0;
第五步:重复至第一步。

然而在有一次的电路仿真中,可能受到仿真工具时钟采样影响,调整为
当counter == (M-0.5)或counter == 0时翻转
实现了正确的时钟分频。因此该值可能需要根据工具和开发板调整,或者说这样的设计是不可靠的,当然了如果需要半分频时候最好还是通过pll实现吧。
理论上是当counter == (M-0.5)或counter == (M-1.5)时翻转没错,给出的代码和波形也是这样的。
verilog代码如下,参数M实际为分频系数-0.5(即3.5->3),WIDTH为(M的位宽-1):
module time_adv_half #(
parameter M = 2,
WIDTH = 7
)(
input clk,
input rst,
output reg clk_out
);
wire clk_cnt;
assign clk_cnt = (clk_vld) ? !clk : clk;
reg [WIDTH : 0]counter;
always @(posedge clk_cnt or posedge rst) begin
if (rst) begin
// reset
counter <= 0;
end
else if (counter == M) begin
counter <= 0;
end
else begin
counter <= counter + 1;
end
end
reg clk_vld;
always @(posedge clk_out or posedge rst) begin
if (rst) begin
// reset
clk_vld <= 0;
end
else begin
clk_vld <= !clk_vld;
end
end
always @(posedge clk_cnt or posedge rst) begin
if (rst) begin
// reset
clk_out <= 0;
end
else if (counter == M-1) begin
clk_out <= !clk_out;
end
else if (counter == M) begin
clk_out <= !clk_out;
end
end
endmodule
可以看出clk_out两个上升沿之间为3.5个输入时钟周期。
附:testbench
`timescale 1 ns / 1 ps
module TEST_gate;
reg clk, rst;
wire clk_out_even, clk_out_odd, clk_out_half;
initial begin
clk = 1'b0;
forever #10 clk = ~clk;
end
initial begin
rst = 1'b0;
#2 rst = 1'b1;
#9 rst = 1'b0;
end
time_adv_even #(
.N(4)
,.WIDTH(5)
)u0
(
.clk (clk)
,.rst (rst)
,.clk_out (clk_out_even)
);
time_adv_odd #(
.N(4)
,.WIDTH(5)
)u1
(
.clk (clk)
,.rst (rst)
,.clk_out (clk_out_odd)
);
time_adv_half #(
.M(3)
,.WIDTH(5)
)u2
(
.clk (clk)
,.rst (rst)
,.clk_out (clk_out_half)
);
endmodule