SLAM实战 RGB-D SLAM V2
写在前面
我用的是handsfree团队的Stone机器人,摄像头是Xtion;
我的实战是结合半闲居士的SLAM实战参考着来的,所以文章结构也按照这个来(就是这么臭不要脸)
原文链接:http://www.cnblogs.com/gaoxiang12/p/4462518.html
这次跑得是视觉SLAM的经典程序:RGBD SLAM V2
实验器材
1,硬件
高博用的机器人是改造的turtlebot,Viewbot,差不多啦,其实只要上手快就行.但是!!!,一个机器人,要一万多!对学生太特么不友好了.严重阻碍了我们学生对机器人的学习.
前方广告
在此郑重介绍Handsfree团队的机器人,现在主打的Mini,和Stone,都贼便宜;基础版的两三千,自己买个摄像头按上去就可以跑SLAM;为啥这么便宜呢,可以去搜一搜他们,毕竟都是学僧;
贴个高配版:
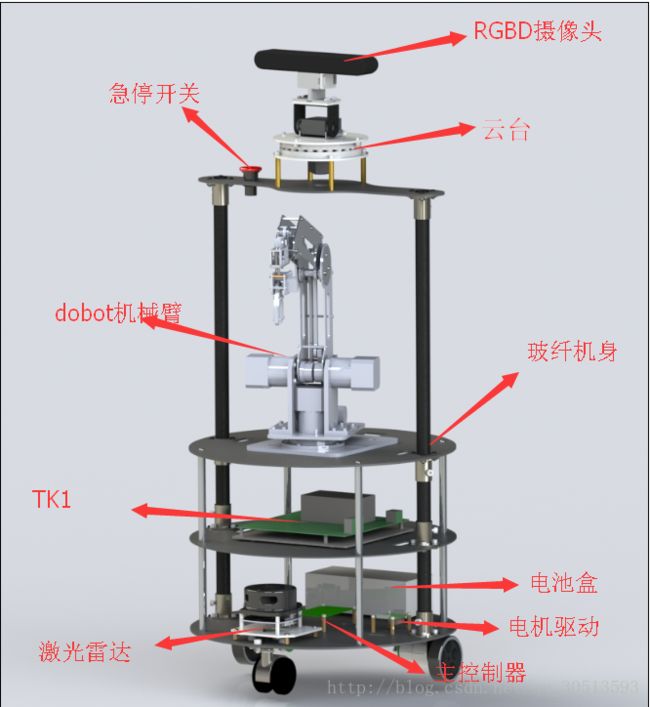
我用的是Stone机器人.加Xtion摄像头
软件
本机为ubuntu14.04,ROS版本为indigo
SLAM程序
和原作的不同,我用的是indigo,所以在下载程序的时候,我下载的是indigo版本,也就是在github上选择branch,换成indigo,下载链接在https://github.com/felixendres/rgbdslam_v2/tree/indigo
下载zip或者
git clone -b indigo https://github.com/felixendres/rgbdslam_v2.git然后按照readme,装装装!主要就是opencv和pcl,还有一个g2o,这个我在另一个博客里已经写了,执行
rosdep install rgbdslam就会直接自动安装
按照说明
mkdir啊catkin_make啊等等,就是把这个包编译一下,搞好之后,就可以直接roslaunch啦!
运行程序
直接roslaunch的话,貌似是不行滴,然后我看了一下,貌似是topic没有对应上,还有摄像头的某个服务好像搞错了,rgbdslam这个节点接受不到照片信息.
小改动以适应Stone
将depth_registration和sw_registered_processing参数设置为true
在rgbdslam的launch中加入
from="/camera/rgb/image_color" to="/camera/rgb/image_rect_color" /> 因为我的摄像头没有输出rect….偏偏rgbdslam要Sub
程序运行良好,就是我的笔记本不太给力…想换电脑,就是没钱….