RT-Thread开发之路(6)— 通过I2C获取BH1750光传感器数据
通过I2C获取BH1750光传感器数据
一、硬件准备
小熊派+E53_SC1扩展模块,如下所示:
二、开启IIC设备
打开board.h文件,找到IIC的配置处,按照其提示配置:

首先,打开【RT-Thread Settings】,开启软件模拟I2C,然后保存使之生效

通过查看原理图,可以知道,其连接到的引脚是I2C1_SDA -> PB7和I2C1_SCL -> PB6,将board.h的I2C1的注释打开,并输入对应的引脚:

然后编译烧录下载,在msh下输入list_device查看一下,可以看到,I2C注册成功

三、导入BH1750软件包
打开【RT-Thread Settings】,点击添加软件包,搜索BH1750,然后点击添加:

保存使之生效后,我们可以看到,bh1750软件包已经添加进来了:
打开sensor_rohm_bh1750.c,找到bh1750_port()函数,将其中的I2C修改为我们使用的"i2c1"

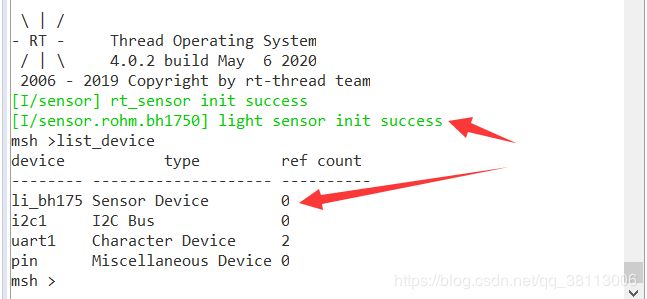
然后就可以编译烧录运行了,在msh下输入list_device查看,bh1750已经注册好了:
然后我们输入命令sensor probe li_bh1750,将BH1750打开,可以看到,打开成功,然后使用sensor read命令,可以看到,没有数据

这是因为没有写入环境光照强度打印代码,我们打开\components\drivers\sensors\sensor_cmd.c,在sensor_show_data函数后面自行增加环境光照强度打印代码:
case RT_SENSOR_CLASS_LIGHT:
LOG_I("num:%3d, light:%4d.%d, timestamp:%5d", num, sensor_data->data.light / 10, sensor_data->data.light % 10, sensor_data->timestamp);
break;
然后重新编译烧录运行,可以看到可以读取出数据了:

四、编写应用代码
新建app_bh1750.c文件,创建一个线程,每隔一秒读取一次光照数据,然后将其打印出来,并结合之前的内容:RT-Thread开发之路(4)— MQTT通信,将光照数据发送到EMQ服务器。代码如下:
#include "sensor.h"
/* 定义一个BH1750线程句柄结构体指针 */
static rt_thread_t app_bh1750_thread = RT_NULL;
/* 发布"BH1750_Pub"主题消息函数 */
void BH1750_Publish(char * msg);
char data_buf[32];
static void app_bh1750_thread_entry(void *parameter)
{
rt_device_t dev = RT_NULL;
struct rt_sensor_data data;
rt_size_t res;
/* 查找系统中的传感器设备 */
dev = rt_device_find("li_bh1750");
if (dev == RT_NULL)
{
rt_kprintf("Can't find device:li_bh1750\n");
return;
}
/* 以轮询模式打开传感器设备 */
if (rt_device_open(dev, RT_DEVICE_FLAG_RDONLY) != RT_EOK)
{
rt_kprintf("open device failed!");
return;
}
while(1)
{
/* 从传感器读取一个数据 */
res = rt_device_read(dev, 0, &data, 1);
if (res != 1)
{
rt_kprintf("read data failed!size is %d", res);
}
else
{
rt_kprintf("light:%4d.%d lux \n", (&data)->data.light / 10, (&data)->data.light % 10);
rt_sprintf(data_buf,"\"light\":%4d.%d lux \n", (&data)->data.light / 10, (&data)->data.light % 10);
BH1750_Publish(data_buf);
}
rt_thread_mdelay(1000);
}
/* 关闭传感器设备 */
rt_device_close(dev);
}
static int app_bh1750_init(void)
{
rt_err_t rt_err;
/* 创建BH1750线程*/
app_bh1750_thread = rt_thread_create("app_bh1750 thread",
app_bh1750_thread_entry, RT_NULL, 2048, 6, 10);
/* 如果获得线程控制块,启动这个线程 */
if (app_bh1750_thread != RT_NULL)
rt_err = rt_thread_startup(app_bh1750_thread);
else
rt_kprintf("app_bh1750_thread create failure !!! \n");
/* 判断线程是否启动成功 */
if( rt_err == RT_EOK)
rt_kprintf("app_bh1750_thread startup ok. \n");
else
rt_kprintf("app_bh1750_thread startup err. \n");
return rt_err;
}
INIT_APP_EXPORT(app_bh1750_init);
另外修改过的app_mqtt.c文件如下:
#include 编译烧录运行,可以看到,运行成功:

然后再MQTT上也接收到了数据:
