orb_slam2外接海康摄像头在Windows10、VS2013下实时运行
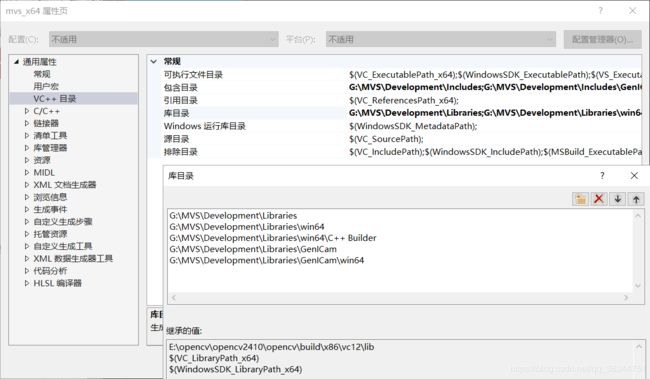
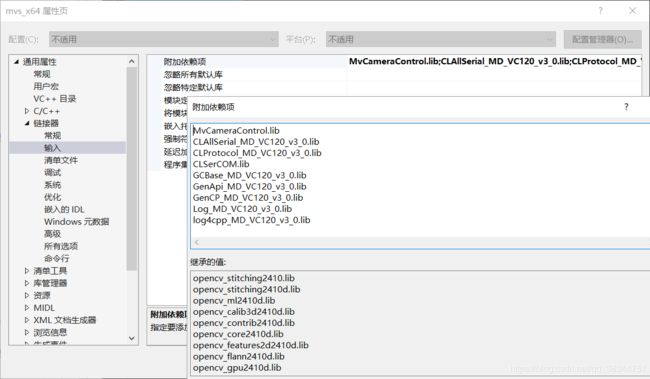
在写代码前有一系列的步骤,需要去官网下载海康sdk,然后把里面Decelopment文件下的头文件和库文件添加到属性表里,这样代码就可以直接调用里面的函数。
包含目录:

库目录:
附加依赖性:
代码只需将mono_kitti.cc的代码修改如下:
#pragma comment(lib, "MvCameraControl.lib")
#include
#include
#include
#include
#include
#include
#include
#include "MvCameraControl.h"
#include
#include
#include
#include
#include
#include
#include "string.h"
unsigned int g_nPayloadSize = 0;
using namespace std;
enum CONVERT_TYPE
{
OpenCV_Mat = 0, // Most of the time, we use 'Mat' format to store image data after OpenCV V2.1
};
// print the discovered devices information to user 将发现的设备信息打印给用户
bool PrintDeviceInfo(MV_CC_DEVICE_INFO* pstMVDevInfo)
{
if (NULL == pstMVDevInfo)
{
printf("The Pointer of pstMVDevInfo is NULL!\n");
return false;
}
if (pstMVDevInfo->nTLayerType == MV_USB_DEVICE)
{
printf("UserDefinedName: %s\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.chUserDefinedName);
printf("Serial Number: %s\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.chSerialNumber);
printf("Device Number: %d\n\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.nDeviceNumber);
}
else
printf("Not support.\n");
return true;
}
int RGB2BGR(unsigned char* pRgbData, unsigned int nWidth, unsigned int nHeight)
{
if (NULL == pRgbData)
{
return MV_E_PARAMETER;
}
for (unsigned int j = 0; j < nHeight; j++)
{
for (unsigned int i = 0; i < nWidth; i++)
{
unsigned char red = pRgbData[j * (nWidth * 3) + i * 3];
pRgbData[j * (nWidth * 3) + i * 3] = pRgbData[j * (nWidth * 3) + i * 3 + 2];
pRgbData[j * (nWidth * 3) + i * 3 + 2] = red;
}
}
return MV_OK;
}
// convert data stream in Mat format 以Mat格式转换数据流
bool Convert2Mat(MV_FRAME_OUT_INFO_EX* pstImageInfo, unsigned char * pData)
{
cv::Mat srcImage;
if (pstImageInfo->enPixelType == PixelType_Gvsp_Mono8)
{
srcImage = cv::Mat(pstImageInfo->nHeight, pstImageInfo->nWidth, CV_8UC1, pData);
}
else if (pstImageInfo->enPixelType == PixelType_Gvsp_RGB8_Packed)
{
RGB2BGR(pData, pstImageInfo->nWidth, pstImageInfo->nHeight);
srcImage = cv::Mat(pstImageInfo->nHeight, pstImageInfo->nWidth, CV_8UC3, pData);
}
else
{
printf("unsupported pixel format\n");
return false;
}
if (NULL == srcImage.data)
{
return false;
}
//save converted image in a local file 保存
// try {
//#if defined (VC9_COMPILE)
// cvSaveImage("MatImage.jpg", &(IplImage(srcImage)));
//#else
// cv::imwrite("MatImage.jpg", srcImage);
//#endif
// }
// catch (cv::Exception& ex) {
// fprintf(stderr, "Exception saving image to bmp format: %s\n", ex.what());
// }
srcImage.release();
return true;
}
int main(int argc, char **argv)
{
if (argc != 4)
{
cerr << endl << "Usage: ./path_to_PF_ORB path_to_vocabulary path_to_settings path_to_dev_video" << endl;
return 1;
}
int nRet = MV_OK;
void* handle = NULL;
// Create SLAM system. It initializes all system threads and gets ready to process frames.
ORB_SLAM2::System SLAM(argv[1], argv[2], ORB_SLAM2::System::MONOCULAR, true);
cout << endl << "-------" << endl;
cout << "Start processing sequence ..." << endl;
// Main loop
do
{
// Enum device
MV_CC_DEVICE_INFO_LIST stDeviceList;
memset(&stDeviceList, 0, sizeof(MV_CC_DEVICE_INFO_LIST));
nRet = MV_CC_EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE, &stDeviceList);
if (MV_OK != nRet)
{
printf("Enum Devices fail! nRet [0x%x]\n", nRet);
break;
}
if (stDeviceList.nDeviceNum > 0)
{
for (unsigned int i = 0; i < stDeviceList.nDeviceNum; i++)
{
printf("[device %d]:\n", i);
MV_CC_DEVICE_INFO* pDeviceInfo = stDeviceList.pDeviceInfo[i];
if (NULL == pDeviceInfo)
{
break;
}
PrintDeviceInfo(pDeviceInfo);
}
}
else
{
printf("Find No Devices!\n");
break;
}
// select device to connect
//printf("Please Input camera index:");
unsigned int nIndex = 0;
//scanf("%d", &nIndex);
if (nIndex >= stDeviceList.nDeviceNum)
{
printf("Input error!\n");
break;
}
// Select device and create handle
nRet = MV_CC_CreateHandle(&handle, stDeviceList.pDeviceInfo[nIndex]);
if (MV_OK != nRet)
{
printf("Create Handle fail! nRet [0x%x]\n", nRet);
break;
}
// open device
nRet = MV_CC_OpenDevice(handle);
if (MV_OK != nRet)
{
printf("Open Device fail! nRet [0x%x]\n", nRet);
break;
}
// Detection network optimal package size(It only works for the GigE camera)
if (stDeviceList.pDeviceInfo[nIndex]->nTLayerType == MV_GIGE_DEVICE)
{
int nPacketSize = MV_CC_GetOptimalPacketSize(handle);
if (nPacketSize > 0)
{
nRet = MV_CC_SetIntValue(handle, "GevSCPSPacketSize", nPacketSize);
if (nRet != MV_OK)
{
printf("Warning: Set Packet Size fail nRet [0x%x]!", nRet);
}
}
else
{
printf("Warning: Get Packet Size fail nRet [0x%x]!", nPacketSize);
}
}
// Set trigger mode as off
nRet = MV_CC_SetEnumValue(handle, "TriggerMode", 0);
if (MV_OK != nRet)
{
printf("Set Trigger Mode fail! nRet [0x%x]\n", nRet);
break;
}
// Get payload size
MVCC_INTVALUE stParam;
memset(&stParam, 0, sizeof(MVCC_INTVALUE));
nRet = MV_CC_GetIntValue(handle, "PayloadSize", &stParam);
if (MV_OK != nRet)
{
printf("Get PayloadSize fail! nRet [0x%x]\n", nRet);
break;
}
g_nPayloadSize = stParam.nCurValue;
// Start grab image
nRet = MV_CC_StartGrabbing(handle);
if (MV_OK != nRet)
{
printf("Start Grabbing fail! nRet [0x%x]\n", nRet);
break;
}
// 数据去转换
//bool bConvertRet = false;
//bConvertRet = Convert2Mat(&stImageInfo, pData);
int timeStamps = 0;
for (;; timeStamps++)
{
cv::Mat srcImage;
MV_FRAME_OUT_INFO_EX stImageInfo = { 0 };
memset(&stImageInfo, 0, sizeof(MV_FRAME_OUT_INFO_EX));
unsigned char * pData = (unsigned char *)malloc(sizeof(unsigned char) * (g_nPayloadSize));
if (pData == NULL)
{
printf("Allocate memory failed.\n");
break;
}
// get one frame from camera with timeout=1000ms
nRet = MV_CC_GetOneFrameTimeout(handle, pData, g_nPayloadSize, &stImageInfo, 1000);
if (nRet == MV_OK)
{
printf("Get One Frame: Width[%d], Height[%d], nFrameNum[%d]\n",
stImageInfo.nWidth, stImageInfo.nHeight, stImageInfo.nFrameNum);
}
else
{
printf("No data[0x%x]\n", nRet);
free(pData);
pData = NULL;
break;
}
if (stImageInfo.enPixelType == PixelType_Gvsp_Mono8)
{
srcImage = cv::Mat(stImageInfo.nHeight, stImageInfo.nWidth, CV_8UC1, pData);
}
else if (stImageInfo.enPixelType == PixelType_Gvsp_RGB8_Packed)
{
RGB2BGR(pData, stImageInfo.nWidth, stImageInfo.nHeight);
srcImage = cv::Mat(stImageInfo.nHeight, stImageInfo.nWidth, CV_8UC3, pData);
}
else
{
printf("unsupported pixel format\n");
return false;
}
if (NULL == srcImage.data)
{
return false;
}
// Pass the image to the SLAM system
SLAM.TrackMonocular(srcImage, timeStamps);
}
// print result
/* if (bConvertRet)
{
printf("OpenCV format convert finished.\n");
free(pData);
pData = NULL;
}
else
{
printf("OpenCV format convert failed.\n");
free(pData);
pData = NULL;
break;
}*/
// Stop grab image
nRet = MV_CC_StopGrabbing(handle);
if (MV_OK != nRet)
{
printf("Stop Grabbing fail! nRet [0x%x]\n", nRet);
break;
}
// Close device
nRet = MV_CC_CloseDevice(handle);
if (MV_OK != nRet)
{
printf("ClosDevice fail! nRet [0x%x]\n", nRet);
break;
}
// Destroy handle
nRet = MV_CC_DestroyHandle(handle);
if (MV_OK != nRet)
{
printf("Destroy Handle fail! nRet [0x%x]\n", nRet);
break;
}
} while (0);
if (nRet != MV_OK)
{
if (handle != NULL)
{
MV_CC_DestroyHandle(handle);
handle = NULL;
}
}
SLAM.Shutdown();
SLAM.SaveKeyFrameTrajectoryTUM("KeyFrameTrajectory.txt");
return 0;
}