PCL点云库学习笔记(4):区域生长点云分割
初学者笔记:
点云数据链接:
链接:https://pan.baidu.com/s/1VTVxn3BntbAr9tGHv6L-HA
提取码:u81q
代码:
#include
VTK_MODULE_INIT(vtkRenderingOpenGL)
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace pcl;
using namespace std;
typedef PointXYZ PoinT;
int *rand_rgb(){//随机产生颜色
int *rgb = new int[3];
rgb[0] = rand() % 255;
rgb[1] = rand() % 255;
rgb[2] = rand() % 255;
return rgb;
}
int main(){
PointCloud::Ptr cloud(new PointCloud);
if (io::loadPCDFile("C:\\Users\\Administrator\\Desktop\\desk.pcd", *cloud) == -1){
PCL_ERROR("read false");
}
//降采样****************************************************
VoxelGrid vox;
PointCloud::Ptr vox_cloud(new PointCloud);
vox.setInputCloud(cloud);
vox.setLeafSize(0.01, 0.01, 0.01);
vox.filter(*vox_cloud);
//去噪声***************************************************
StatisticalOutlierRemovalsor;
PointCloud::Ptr sor_cloud(new PointCloud);
sor.setInputCloud(vox_cloud);
sor.setMeanK(20);
sor.setStddevMulThresh(0.02);
sor.filter(*sor_cloud);
//法向量求解**********************************************
NormalEstimation ne;
search::KdTree::Ptr tree(new search::KdTree);
PointCloud::Ptr normal_cloud(new PointCloud);
ne.setInputCloud(sor_cloud);
ne.setKSearch(20);
ne.setSearchMethod(tree);
ne.compute(*normal_cloud);
//基于法向量和曲率的区域生长算法**************************
PointCloud::Ptr reg_cloud(new PointCloud);
RegionGrowing reg;
reg.setInputCloud(sor_cloud);
reg.setSearchMethod(tree);
reg.setNumberOfNeighbours(20);
reg.setMinClusterSize(50);
reg.setMaxClusterSize(100000);
reg.setSmoothnessThreshold(3.0 / 180 * M_PI);
reg.setCurvatureThreshold(1.0);
reg.setInputNormals(normal_cloud);
vectorclusters;
reg.extract(clusters);
visualization::PCLVisualizer::Ptr viewer(new visualization::PCLVisualizer("Result of RegionGrowing"));
for (int iter = 0; iter < clusters.size();iter++)
{
PointCloud::Ptr copy_cloud(new PointCloud);
vector inlier = clusters[iter].indices;
copyPointCloud(*sor_cloud, inlier, *copy_cloud);
stringstream ss;
ss << "C:\\Users\\Administrator\\Desktop\\" << "RegionGrowing_clouds" << iter << ".pcd";
//io::savePCDFileASCII(ss.str(), *copy_cloud);
int *rgb = rand_rgb();//随机生成0-255的颜色值
visualization::PointCloudColorHandlerCustomrgb1(copy_cloud, rgb[0], rgb[1], rgb[2]);//提取的平面不同彩色展示
delete[]rgb;
viewer->addPointCloud(copy_cloud, rgb1, ss.str());
viewer->setPointCloudRenderingProperties(visualization::PCL_VISUALIZER_POINT_SIZE, 3, ss.str());
}
viewer->spin();
return 0;
}
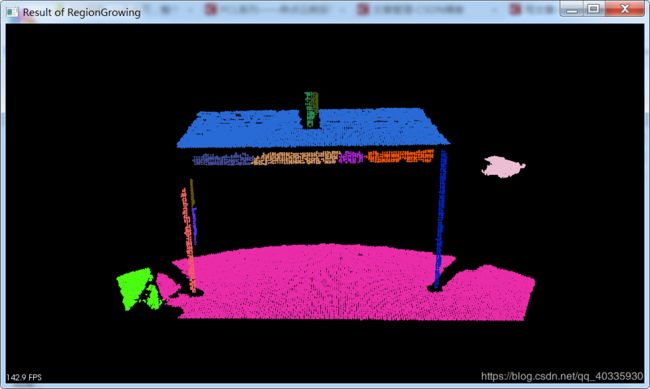
可视化结果:
利用ExtractIndices按点云索引提取点云子集
#include
VTK_MODULE_INIT(vtkRenderingOpenGL)
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace pcl;
using namespace std;
typedef PointXYZ PoinT;
int *rand_rgb(){//随机产生颜色
int *rgb = new int[3];
rgb[0] = rand() % 255;
rgb[1] = rand() % 255;
rgb[2] = rand() % 255;
return rgb;
}
int main(){
PointCloud::Ptr cloud(new PointCloud);
if (io::loadPCDFile("C:\\Users\\Administrator\\Desktop\\desk.pcd", *cloud) == -1){
PCL_ERROR("read false");
}
//降采样****************************************************
VoxelGrid vox;
PointCloud::Ptr vox_cloud(new PointCloud);
vox.setInputCloud(cloud);
vox.setLeafSize(0.01, 0.01, 0.01);
vox.filter(*vox_cloud);
//去噪声***************************************************
StatisticalOutlierRemovalsor;
PointCloud::Ptr sor_cloud(new PointCloud);
sor.setInputCloud(vox_cloud);
sor.setMeanK(20);
sor.setStddevMulThresh(0.02);
sor.filter(*sor_cloud);
//法向量求解**********************************************
NormalEstimation ne;
search::KdTree::Ptr tree(new search::KdTree);
PointCloud::Ptr normal_cloud(new PointCloud);
ne.setInputCloud(sor_cloud);
ne.setKSearch(20);
ne.setSearchMethod(tree);
ne.compute(*normal_cloud);
//基于法向量和曲率的区域生长算法**************************
PointCloud::Ptr reg_cloud(new PointCloud);
RegionGrowing reg;
reg.setInputCloud(sor_cloud);
reg.setSearchMethod(tree);
reg.setNumberOfNeighbours(20);
reg.setMinClusterSize(50);
reg.setMaxClusterSize(100000);
reg.setSmoothnessThreshold(3.0 / 180 * M_PI);
reg.setCurvatureThreshold(1.0);
reg.setInputNormals(normal_cloud);
vectorclusters;
reg.extract(clusters);
ExtractIndicesext;
visualization::PCLVisualizer::Ptr viewer(new visualization::PCLVisualizer("Result of RegionGrowing"));
for (int iter = 0; iter < clusters.size();iter++)
{
//调用方式*************************************************************
PointCloud::Ptr final_cloud(new PointCloud);
vector inlier = clusters[iter].indices;
boost::shared_ptr>index = boost::make_shared>(inlier);
ext.setInputCloud(sor_cloud);
ext.setIndices(index);
ext.setNegative(false);
ext.filter(*final_cloud);
//************************************************************************
stringstream ss;
ss << "C:\\Users\\Administrator\\Desktop\\" << "RegionGrowing_clouds" << iter << ".pcd";
//io::savePCDFileASCII(ss.str(), *copy_cloud);
int *rgb = rand_rgb();//随机生成0-255的颜色值
visualization::PointCloudColorHandlerCustomrgb1(final_cloud, rgb[0], rgb[1], rgb[2]);//提取的平面不同彩色展示
delete[]rgb;
viewer->addPointCloud(final_cloud, rgb1, ss.str());
viewer->setPointCloudRenderingProperties(visualization::PCL_VISUALIZER_POINT_SIZE, 3, ss.str());
}
viewer->spin();
return 0;
}
分割线----------------------------------------------------------------------------------------------------------------------------------------
获取分割的结果,并获取剩余的点云数据
代码:
#include
VTK_MODULE_INIT(vtkRenderingOpenGL)
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace pcl;
using namespace std;
typedef PointXYZ PoinT;
int *rand_rgb(){//随机产生颜色
int *rgb = new int[3];
rgb[0] = rand() % 255;
rgb[1] = rand() % 255;
rgb[2] = rand() % 255;
return rgb;
}
int main(){
PointCloud::Ptr cloud(new PointCloud);
if (io::loadPCDFile("C:\\Users\\Administrator\\Desktop\\desk.pcd", *cloud) == -1){
PCL_ERROR("read false");
}
//降采样****************************************************
VoxelGrid vox;
PointCloud::Ptr vox_cloud(new PointCloud);
vox.setInputCloud(cloud);
vox.setLeafSize(0.01, 0.01, 0.01);
vox.filter(*vox_cloud);
//去噪声***************************************************
StatisticalOutlierRemovalsor;
PointCloud::Ptr sor_cloud(new PointCloud);
sor.setInputCloud(vox_cloud);
sor.setMeanK(20);
sor.setStddevMulThresh(0.02);
sor.filter(*sor_cloud);
//法向量求解**********************************************
NormalEstimation ne;
search::KdTree::Ptr tree(new search::KdTree);
PointCloud::Ptr normal_cloud(new PointCloud);
ne.setInputCloud(sor_cloud);
ne.setKSearch(20);
ne.setSearchMethod(tree);
ne.compute(*normal_cloud);
//基于法向量和曲率的区域生长算法**************************
PointCloud::Ptr reg_cloud(new PointCloud);
RegionGrowing reg;
reg.setInputCloud(sor_cloud);
reg.setSearchMethod(tree);
reg.setNumberOfNeighbours(20);
reg.setMinClusterSize(50);
reg.setMaxClusterSize(100000);
reg.setSmoothnessThreshold(3.0 / 180 * M_PI);
reg.setCurvatureThreshold(1.0);
reg.setInputNormals(normal_cloud);
vectorclusters;
reg.extract(clusters);
ExtractIndicesext;
visualization::PCLVisualizer::Ptr viewer(new visualization::PCLVisualizer("Result of RegionGrowing"));
vectorindex;
for (int iter = 0; iter < clusters.size();iter++)
{
//将索引汇总************************************************************************
PointCloud::Ptr final_cloud(new PointCloud);
vector inlier = clusters[iter].indices;
index.insert(index.end(), inlier.begin(), inlier.end());
//提取每个索引对应得点云并展示*******************************************************
boost::shared_ptr>index1 = boost::make_shared>(inlier);
ext.setInputCloud(sor_cloud);
ext.setIndices(index1);
ext.filter(*final_cloud);
stringstream ss;
ss << "C:\\Users\\Administrator\\Desktop\\" << "RegionGrowing_clouds" << iter << ".pcd";
//io::savePCDFileASCII(ss.str(), *copy_cloud);
int *rgb = rand_rgb();//随机生成0-255的颜色值
visualization::PointCloudColorHandlerCustomrgb1(final_cloud, rgb[0], rgb[1], rgb[2]);//提取的平面不同彩色展示
delete[]rgb;
viewer->addPointCloud(final_cloud, rgb1, ss.str());
viewer->setPointCloudRenderingProperties(visualization::PCL_VISUALIZER_POINT_SIZE, 3, ss.str());
}
viewer->spinOnce(1000);
//将索引取反,获取剩余的点云数据,并展示******************************************************
PointCloud::Ptr rest_cloud(new PointCloud);
boost::shared_ptr>index_final = boost::make_shared>(index);
ext.setInputCloud(sor_cloud);
ext.setIndices(index_final);
ext.setNegative(true);
ext.filter(*rest_cloud);
visualization::PCLVisualizer::Ptr viewer1(new visualization::PCLVisualizer("rest_clouds"));
viewer1->addPointCloud(rest_cloud,"rest_clous");
viewer1->setPointCloudRenderingProperties(visualization::PCL_VISUALIZER_POINT_SIZE, 3, "rest_clous");
//io::savePCDFileASCII("C:\\Users\\Administrator\\Desktop\\rest_clouds", *rest_cloud);
viewer1->spin();
return 0;
}
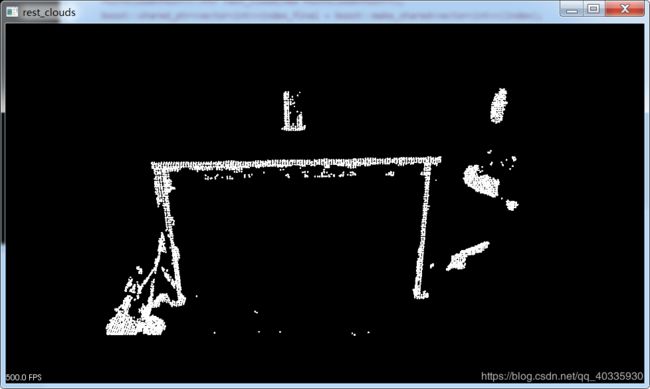
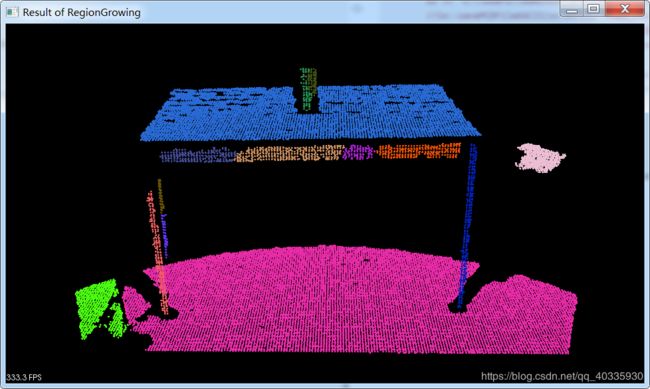
结果: