通信系统指标解析
1 噪声
噪声通常是由器件和材料中的电荷或载流子的随机运行所产生的。根据产生机制的不同分为热噪声、散粒噪声、闪烁噪声、等离子噪声、量子噪声等。
1.1 噪声功率
![]()
式中
k-波尔兹曼常数 1. 380x10^-23 J/K;
T一热力学温度(K);
B-系统的带宽(Hz)。
在很多实际情况下,通常用等效噪声温度来表征噪声功率。
![]()
1.2噪声系数
噪声系数是对系统的输入和输出之间的信噪比递降的一种衡量度。

将噪声系数转化为等效噪声温度。
![]()
 ---290K
---290K
在级联情况下,整个系统的噪声系数及等效噪声温度为:
![]()
![]()
2 灵敏度
在 =290K的情况下,1Hz 带宽产生的噪声功率为:
=290K的情况下,1Hz 带宽产生的噪声功率为:
![]()
= -204dBW
= -174dBm
而接收机的灵敏度计算为:
S = -174dBm + NF + SNR + 10log(BW)
式中
NF-接收机噪声系数;
SNR -满足一定条件误码率所需的最低信噪比;
BW-接收机工作带宽。
3 线性度
系统的线性度一-般用1dB增益压缩点(PldB) 和三阶交截点(IP3) 来描述。
3.1 1dB增益压缩点(P1dB)
在实际系统中,输出响应严格正比于输人激励的理想化线性系统并不存在,一般的系统可以简单地描述成:
![]()
当输入信号为x(t) = Acos(wt),系统的输出为:
因此,基频信号的系统增益为:
![]()
对于大多数系统,a1和a3的符号相反,系统增益随着信号幅度A的增加而下降。如果用对数来表示系统的输人和输出信号幅度,可以清楚地看到输出功率随输人功率增大而偏离线性关系的情况。当输出功率与理想的线性情况偏离达到1dB时,系统的增益也下降了1dB,此时的输入信号功率值称为1dB增益压缩点(P1dB)如图所示。在PIdB点,信号幅度计算公式为:

![]()
![]()

3.2 三阶交截点(IP3)/ TOI
当系统输人两个频率靠得很近的信号时,在系统输出中除了会产生基波及其各次谐波外,还会产生频率之间的交调成分。假设输人信号为:
![]()
将信号代入:
![]()
得到系统的信号输出:
![]()
![]()
![]()
从以上输出信号可以看出,在双音输人的情况下,系统输出产生了二阶、三阶及更高阶的产物,由于偶数阶交调产物离基频比较远,可以很方便地通过滤波器滤除,而奇数阶产物通常在滤波器通带内,很难滤除,尤其是以三阶产物幅度最大。因此,系统重点考虑的是三阶交调的影响。
以dB为单位的坐标中,基频信号和三阶交调信号的斜率不同。因此,随着信号幅度A的增加,两条线必有一个交点,这个点就是三阶交截点(IP3), 可以用输人功率表示(IIP3)或输出功率表示(OIP3),如图所示。
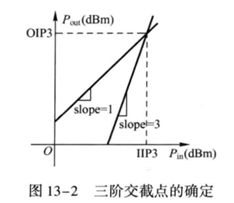
在三阶交截点上,输人信号幅度的计算公式为:
![]()
![]()
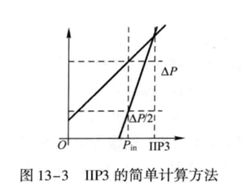
在实际系统中,可以根据下图所示计算方法推导出IIP3的简单计算公式为:
![]()
上面的推导是基于两个输人信号的幅度相等的前提。在实际系统中,经常发生的一种情况是有用信号的幅度很小,而频率相差很近的干扰信号的幅度很大,这样会产生大信号阻塞。当输人信号为![]() ,其中
,其中![]() ,则系统输出信号为:
,则系统输出信号为:
![]()
通常情况下, 和
和![]() 符号相反,又因为
符号相反,又因为![]() ,所以
,所以![]() 的值将变得很小,也就是基频的系统增益会急剧减小,即有用信号将被干扰信号阻塞了。
的值将变得很小,也就是基频的系统增益会急剧减小,即有用信号将被干扰信号阻塞了。
在级联情况下,整个系统的IP3计算公式为:
![]()
对于复杂调制下的系统,除了上面的指标表现其线性度外,还有如邻道功率比( ACPR:信道带宽内信号功率和距中心频率△f处△B带宽内泄露或扩散的信号功率)和噪声功率比(NPR:测量非线性形成的带内干扰)等。
4 动态范围
受噪声和交调失真的影响,系统的工作范围限制在- -定范围内,输人功率的低端必须大于噪声电平,高端应该在交调失真限制极限以下。根据应用范围的不同,动态范围的定义也分为多种形式。
4.1 线性动态范围(LDR)
在噪声功率和1dB增益压缩点之间的范围定义为线性动态范围。
![]()
4.2 无寄生动态范围
无寄生动态范围的定义为三阶交调功率与输出噪声相等时,输人信号与等效输人噪声之比,即在该范围内交调产物的功率值- -直小于噪声值,可以认为没有交调产物,交调产物也可以看作是寄生产物,这也是无寄生动态范围的物理意义。如图是无寄生动态范围的确定。
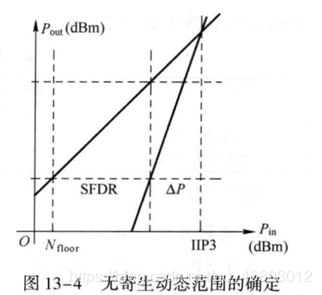
无寄生动态范围的确定,计算公式为:
![]()