使用 Matlab 生成双目视差及点云图像
目录
- 使用 Matlab 生成双目视差及点云图像(TODO)
- 准备工作
- 采集棋盘格图像
- 使用 Matlab *Stereo Camera Calibrator* 进行双目相机标定
- 编写 matlab 脚本,生成视差图,点云图
- matlab 脚本
- 运行结果
- 说明
- 参考
使用 Matlab 生成双目视差及点云图像(TODO)
最近需要验证一下双相机的成像效果,一开始使用了opencv + python/cpp 代码采集、标定并生成视差图,效果不是很理想,所以决定先用 matlab 标定相机,生成图像点云,查看效果,如果不错的话,以此为基准优化 opencv 代码。
准备工作
首先需要下载 Matlab(废话,哈哈哈),请支持正版,还需要在其中安装名为 Stereo Camera Calibrator 的立体相机标定程序包。图标是这个样子的(截图好麻烦,算了)。当然,对于 Matlab 菜鸟来说,资料手册什么的必不可少(摸着书本过河比无脑乱撞的要好)。所以下面几个资料还是推荐一下了(官网英文板的):
- Computer Vision ToolBox 官方网页,跟着教程说明走,不懂就 csdn + StackOverflow,对了,如果可以的话,最好是在这个页面下载 Computer Vision ToolBox 的 PDF 文档(包含 Computer Vision Toolbox Getting Started Guide,Computer Vision Toolbox User’s Guide(以后简称手册) 以及另外两个我认为不重要的),不过需要在 Matlab 注册邮箱
- 同上()
好了,开始搞事!下面简单记录下实现步骤,免得以后忘了。
采集棋盘格图像
很无聊的一项工作,但是还是有些要注意的地方。在 Computer Vision ToolBox User’s Guide 中对单目以及双目相机的标定图案、步骤有很详细很规范的说明,以前看 OpenCV 文档的时候的一些模棱两可的操作在这里面都表达的很清楚。

具体的操作步骤参考手册把,列出几个以前犯错误的地方,以示提醒。
- 标定板一边的棋盘格数与另一边的必须奇偶互斥,如果是 12x9 的棋盘格,那么此棋盘格的角点数为 11x8 共 88 个(每条边角点数=此边棋盘格数-1)。
- 相机在采集图像前需要使用分辨率板进行对焦校准。分辨率板如图。

- 不要使用自动对焦功能。
- 每改变一次焦距,就要重新标定相机。
- 用于标定图像数目在10-20张之间,所以尽可能地多采集一些图像(对于普通的非工业相机来说),因为很多情况下超过50%的图像最后是要被筛选掉的。
- 图像最好保存为无损格式
.png,.bmp。 - 标定板的位置尽量放置在双目相机测量物体的距离之间。比如想在1.5米处测量物体,就在大约1.5米处放置标定板。
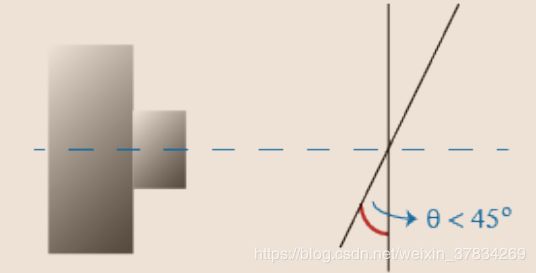
- 采集标定板图像时,可以将标定板多放置几个旋转角度(我没怎么旋转标定板),但是,标定板与相机光轴的倾角不要大于45度。
- 标定板尽量要大一些,这样可以使它在标定时占据图像大部分区域;也就是说,如果需要在很近的距离标定相机(近距离成像),就选相对较小的标定板,反正大的标定板。
- 标定板在一对双目图像中必须各个棋盘格可见。
采集的标定图像示例(标定板有些小,只显示了左相机图像)
注意,需要将左右图集分别放在同级的两个不同的目录下,比如
*
|-left
|-left_*.png
|-right
|-right_*.png

使用 Matlab Stereo Camera Calibrator 进行双目相机标定
接下来就是操作matlab的标定包了。
- 首先打开matlab,在 App 中选择 Stereo Camera Calibrator

- 打开后选择 Add Image(1号),在弹出的对话框中分别给定左右图像集的搜索路径,然后指定棋盘格的大小(单位:mm)

- 可以选择 3 Coefficient(2号)(出处:手册page204,如下图) 使标定更准确。

- 点击 Calibrate(3号)对双目图像进行标定,标定后可以计算出 reprojection error (再次投影误差) 并以条形图显示,可以通过上下拖拽红色区域批量删除误差值过高的图像对,也可以通过 ctrl+鼠标左键多选要删除的不符合要求的图像,被选择的图像在左侧显示栏中以蓝色背景显示,可以直接右键其中的任何一组图像对进行批量删除。我的删图标准,如下;通常情况下,Overall Mean Error(平均误差达) 在 0.06 左右就可以了。
- 图像对中任何一个或一对图像误差值过大的
- 接着是图像对中左右图误差值只差过大的
- reprojection error (再次投影误差) 如图(放大处理),还没有查是如何计算出来的以及代表着什么(TODO)

- 点击 Show Rectified,对图像对进行
y轴(水平对齐),输出图如下

- 接着点击 Export Camera Parameters(5号),会出现两个选项的下拉列表,Export Parameters to workspace 将标定的内外参数矩阵,投影误差等导出到 Matlab 主程序界面的工作区,Generate Matlab script 生成标定运算的脚本。
- 最后记得保存这次的 session 标定会话,也可以创建或导出保存的会话(6,7号)
编写 matlab 脚本,生成视差图,点云图
matlab 脚本
run("D:\M_matLab2020a\workSpace\522d_0605\run_522d_0605.m");
% 读取左右彩色图像
I1_C3 = imread("D:\M_matLab2020a\workSpace\522d_0605\object_left\left_0.png");
I2_C3 = imread("D:\M_matLab2020a\workSpace\522d_0605\object_right\right_0.png");
% 矫正左右彩色图像,利用导入的立体相机参数
[J1_C3, J2_C3] = rectifyStereoImages(I1_C3, I2_C3, stereoParams);
% 利用矫正后的左右图生成立体图像
Anaglyph = stereoAnaglyph(J1_C3, J2_C3);
figure; imshow(Anaglyph);
% 使用 imtool 确定视差范围值(max=93.5),这里取 128,(具体操作见说明)
figure; imtool(Anaglyph);
disparityRange = [0, 128];
% 利用矫正后的灰度图生成视差图
J1_C1 = rgb2gray(J1_C3);
J2_C1 = rgb2gray(J2_C3);
% Minimum value of uniqueness = 20
disparityMap_t20 = disparitySGM(J1_C1, J2_C1, 'DisparityRange', disparityRange, 'UniquenessThreshold', 20);
figure; imshow(disparityMap_t20, disparityRange); title('disp t20'); colormap jet; colorbar;
% Minimum value of uniqueness = 15
disparityMap_t15 = disparitySGM(J1_C1, J2_C1, 'DisparityRange', disparityRange, 'UniquenessThreshold', 15);
figure; imshow(disparityMap_t15, disparityRange); title('disp t15'); colormap jet; colorbar;
% Minimum value of uniqueness = 10
disparityMap_t10 = disparitySGM(J1_C1, J2_C1, 'DisparityRange', disparityRange, 'UniquenessThreshold', 10);
figure; imshow(disparityMap_t10, disparityRange); title('disp t10'); colormap jet; colorbar;
% Minimum value of uniqueness = 5
disparityMap_t5 = disparitySGM(J1_C1, J2_C1, 'DisparityRange', disparityRange, 'UniquenessThreshold', 5);
figure; imshow(disparityMap_t5, disparityRange); title('disp t5'); colormap jet; colorbar;
% Minimum value of uniqueness = 0
disparityMap_t0 = disparitySGM(J1_C1, J2_C1, 'DisparityRange', disparityRange, 'UniquenessThreshold', 0);
figure; imshow(disparityMap_t0, disparityRange); title('disp t0'); colormap jet; colorbar;
% 利用视差图重建 3D 图
points3D = reconstructScene(disparityMap_t10, stereoParams);
% 将距离单位由 mm -> m
points3D = points3D ./ 1000;
% 存储 3D 图的点云数据
ptCloud = pointCloud(points3D, 'Color', J1_C3);
% 使用 pcplayer 观察点云图
player3D = pcplayer([-1, 1], [-1, 1], [0, 2], 'VerticalAxis', 'Y', 'VerticalAxisDir', 'Up');
view(player3D, ptCloud);
运行结果
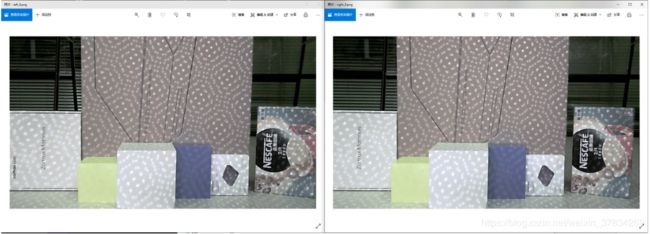
原始图(投影了散斑激光)
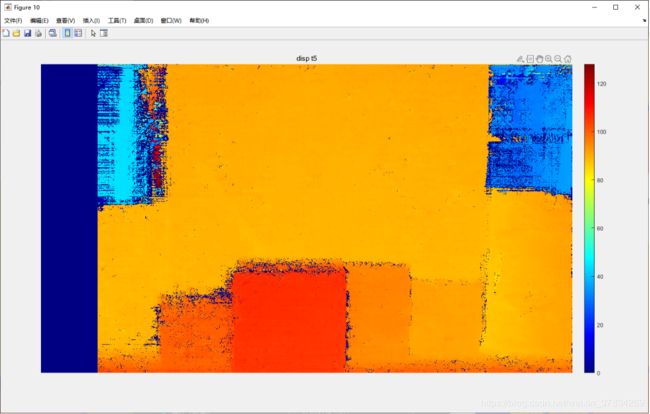
视差图
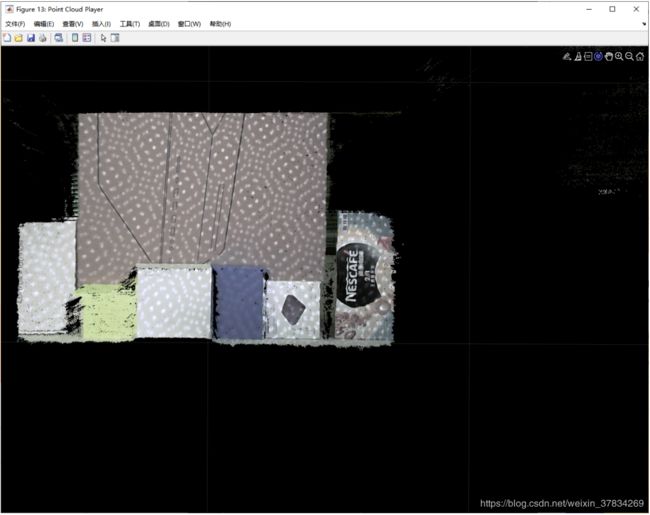
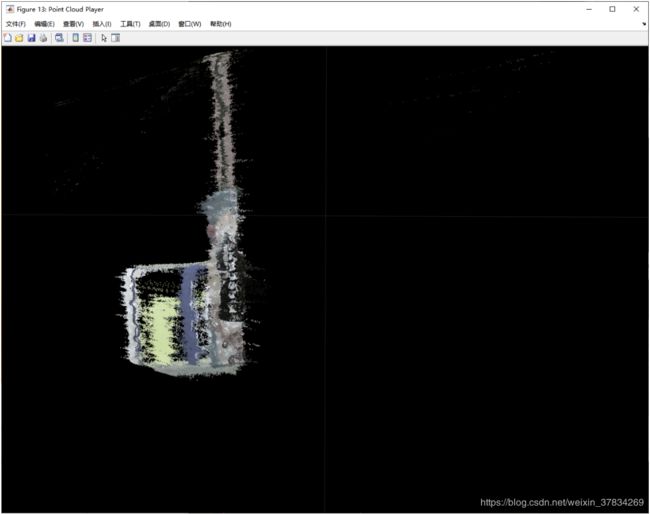
点云图
说明
确定视差范围
使用 imtool 工具测量近中远三个物体的视差距离如图
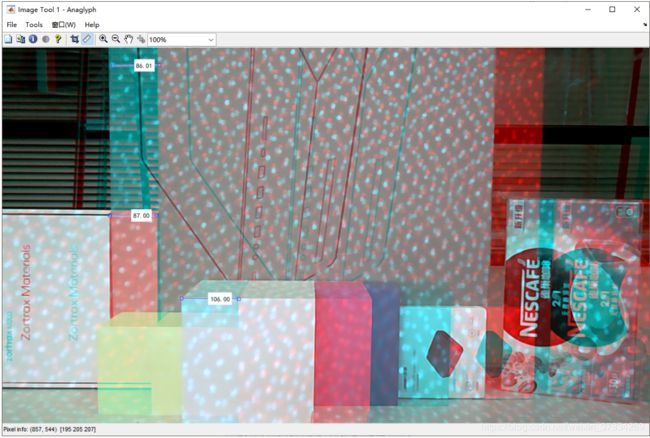
最大视差为 106,则视差范围设为 [0, 128]
参考
- matlab 教程
- Reconstruct 3-D scene from disparity map
- Compute disparity map through semi-global matchin
- Depth Estimation From Stereo Video
- stereoParameters