vs2015+opencv346+yolov3 目标检测学习
文件下载:
https://pjreddie.com/media/files/yolov3.weights
https://github.com/pjreddie/darknet/blob/master/cfg/yolov3.cfg
https://github.com/pjreddie/darknet/blob/master/data/coco.names
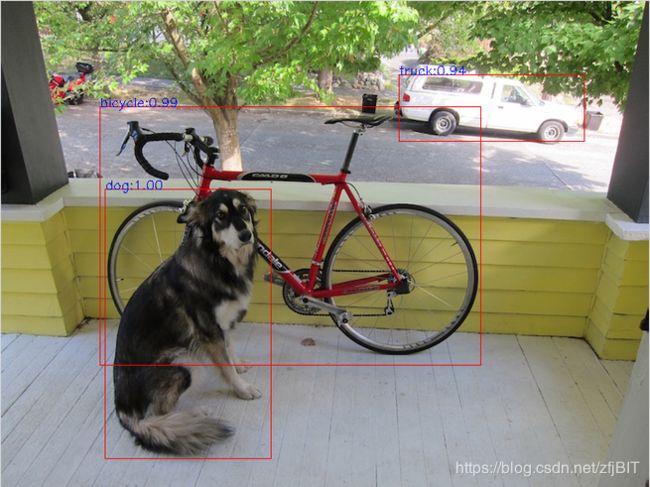
下载yolov3.weights文件(包含预先训练的网络权重),yolov3.cfg文件(包含网络配置)和coco.names文件,其中包含COCO数据集中使用的80个不同的类名。
#include "stdafx.h"
#include
#include
#include
using namespace std;
using namespace cv;
//initialize the parameters
float confThreshold = 0.6;
float nmsThreshold = 0.4;
int inpWidth = 416;
int inpHeight = 416;
vector classes;
// Get the names of the output layers
vector getOutputsNames(const cv::dnn::Net& net)
{
static vector names;
if (names.empty())
{
//Get the indices of the output layers, i.e. the layers with unconnected outputs
vector outLayers = net.getUnconnectedOutLayers();
//get the names of all the layers in the network
vector layersNames = net.getLayerNames();
// Get the names of the output layers in names
names.resize(outLayers.size());
for (size_t i = 0; i < outLayers.size(); ++i)
names[i] = layersNames[outLayers[i] - 1];
}
return names;
}
// Draw the predicted bounding box
void drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat& frame)
{
//Draw a rectangle displaying the bounding box
rectangle(frame, Point(left, top), Point(right, bottom), Scalar(0, 0, 255));
//Get the label for the class name and its confidence
string label = format("%.2f", conf);
if (!classes.empty())
{
CV_Assert(classId < (int)classes.size());
label = classes[classId] + ":" + label;
}
//Display the label at the top of the bounding box
int baseLine;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
top = max(top, labelSize.height);
putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(255, 0, 0));
}
// Remove the bounding boxes with low confidence using non-maxima suppression
void postprocess(Mat& frame, const vector& outs)
{
vector classIds;
vector confidences;
vector boxes;
for (size_t i = 0; i < outs.size(); ++i)
{
// Scan through all the bounding boxes output from the network and keep only the
// ones with high confidence scores. Assign the box's class label as the class
// with the highest score for the box.
float* data = (float*)outs[i].data;
for (int j = 0; j < outs[i].rows; ++j, data += outs[i].cols)
{
Mat scores = outs[i].row(j).colRange(5, outs[i].cols);
Point classIdPoint;
double confidence;
// Get the value and location of the maximum score
minMaxLoc(scores, 0, &confidence, 0, &classIdPoint);
if (confidence > confThreshold)
{
int centerX = (int)(data[0] * frame.cols);
int centerY = (int)(data[1] * frame.rows);
int width = (int)(data[2] * frame.cols);
int height = (int)(data[3] * frame.rows);
int left = centerX - width / 2;
int top = centerY - height / 2;
classIds.push_back(classIdPoint.x);
confidences.push_back((float)confidence);
boxes.push_back(Rect(left, top, width, height));
}
}
}
// Perform non maximum suppression to eliminate redundant overlapping boxes with
// lower confidences
vector indices;
cv::dnn::NMSBoxes(boxes, confidences, confThreshold, nmsThreshold, indices);
for (size_t i = 0; i < indices.size(); ++i)
{
int idx = indices[i];
Rect box = boxes[idx];
drawPred(classIds[idx], confidences[idx], box.x, box.y,
box.x + box.width, box.y + box.height, frame);
}
}
int main()
{
// Load names of classes
string classesFile = "..\\..\\yolov3\\coco.names";
ifstream ifs(classesFile.c_str());
string line;
classes.clear();
while (getline(ifs, line))
{
classes.push_back(line);
}
// Give the configuration and weight files for the model
String modelConfiguration = "..\\..\\yolov3\\yolov3.cfg";
String modelWeights = "..\\..\\yolov3\\yolov3.weights";
// Load the network
cv::dnn::Net net = cv::dnn::readNetFromDarknet(modelConfiguration, modelWeights);
net.setPreferableBackend(cv::dnn::DNN_BACKEND_OPENCV);
net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
cv::Mat testImage = imread("..\\..\\yolov3\\dog.jpg", 1);
// Create a 4D blob from a frame.
cv::Mat blob;
cv::dnn::blobFromImage(testImage, blob, 1 / 255.0, cvSize(inpWidth, inpHeight), Scalar(0, 0, 0), true, false);
//Sets the input to the network
net.setInput(blob);
// Runs the forward pass to get output of the output layers
vector outs;
net.forward(outs, getOutputsNames(net));
// Remove the bounding boxes with low confidence
postprocess(testImage, outs);
return 0;
}