SPI
文章目录
- 相关资料
- 1. 工作方式简介
- 4种工作方式
- 全双工主机/从机连接方法
- (1)一个主机和多个从器件的通信系统。
- (2)几个单片机互相连接构成多主机通信系统。
- (3)主机、从机和从器件共同组成的应用系统。
- 2. 数据传输
- 3.用户逻辑
- 4. 基本原理与结构
- 5. 相关技术资料
- 6. spi针脚
相关资料
SPI libraryhttps://www.arduino.cc/en/Reference/SPI
SPI原文:http://wiki.dzsc.com/4328.html
AVR基础知识:ATMEGA的SPI总线 - 第1部分 https://www.yiboard.com/thread-782-1-1.html
AVR基础知识:ATMEGA的SPI总线 - 第2部分 https://www.yiboard.com/thread-783-1-1.html
由于SPI(setial peripheralinterface)总线占用的接口线少,通信效率高,并且支持大部分处理器芯片,因而是一种理想的选择。SPI是利用4根信号线进行通信的串行接口协议,包括主/从两种模式。4个接口信号为:串行数据输入(MISO,主设备输入、从设备输出)、串行数据输出(MOSI,主设备输出、从设备输入)、移位时钟(SCK)、低电平有效的从设备使能信号(cs)。SPI最大的特点是由主设备时钟信号的出现与否来确定主/从设备间的通信。一旦检测到主设备的时钟信号,数据开始传输。
1. 工作方式简介
SPI是由美国摩托罗拉公司最先推出的一种同步串行传输规范,也是一种单片机外设芯片串行扩展接口。
4种工作方式
SPI模式可以允许同时同步发送和接收8位数据,并支持4种工作方式:
- 串行数据输出,对应RC5/SDO引脚;
- 串行数据输入,对应RC4/SDI/SDA引脚;
- 串行时钟,对应RC3/SCK/SCL引脚;
- 从动方式选择,对应RA5/SS/AN4引脚。
SPI模式下与之相关的寄存器有10个,其中4个是与I2C模式共用的。
图1所示是由一个主机对接一个从机进行全双工通信的系统构成的方式。在该系统中,由于主机和从机的角色是固定不变的,并且只有一个从机,因此,可以将主机的SS端接高电平,将从机的SS端固定接地。
全双工主机/从机连接方法
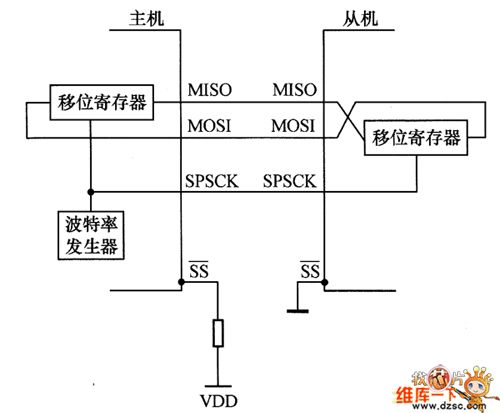
图1 全双工主机/从机连接方法
若干个具备SPI接口的单片机和若干片兼容SPI接口的外围芯片,可以在软件的控制下,构成多种简单或者复杂的应用系统,例如以下3种。
(1)一个主机和多个从器件的通信系统。
如图2所示,各个从器件是单片机的外围扩展芯片,它们的片选端SS分别独占单片机的一条通用I/O引脚,由单片机分时选通它们建立通信。这样省去了单片机在通信线路上发送地址码的麻烦,但是占用了单片机的引脚资源。当外设器件只有一个时,可以不必选通而直接将SS端接地即可。
一个主机扩展多个外围器件
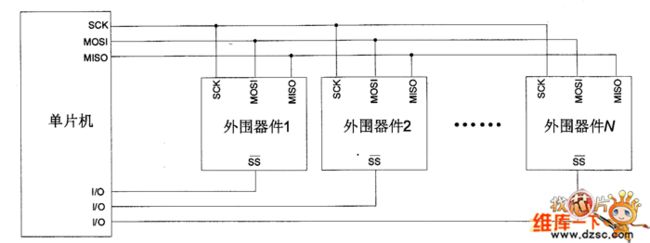
图2 一个主机扩展多个外围器件
(2)几个单片机互相连接构成多主机通信系统。
图3所示为3个既可以当做主机也可以当做从机的单片机组成的系统。
多主机通信系统连接方法
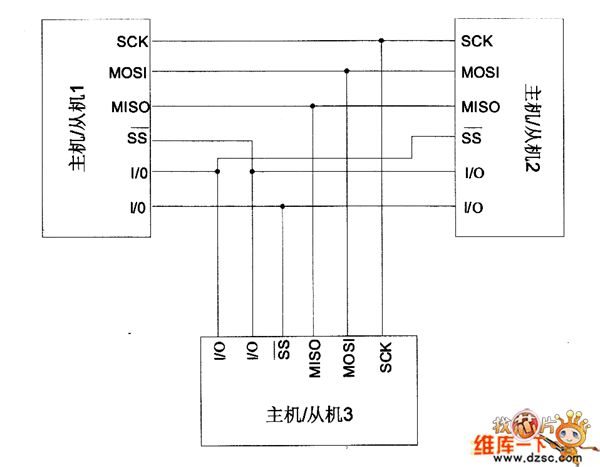
图3 多主机通信系统连接方法
(3)主机、从机和从器件共同组成的应用系统。
图4所示为一个主机、一个从机和多片外设芯片组成的应用系统。这些外设芯片有的只接收来自单片机信息,有的只向单片机提供信息,还有的既接收也发送信息。
主机、从机和从器件互连
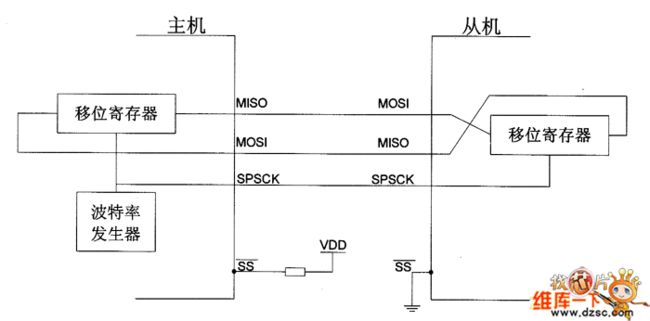
图4主机、从机和从器件互连
2. 数据传输
SPI主设各负责产生系统时钟,并决定整个SPI网络的通信速率。所有的SPI设各都采用相同的接口方式,可以通过调整处理器内部寄存器改变时钟的极性和相位。由于SPI器件并不一定遵循同一标准,比如EEPROM、DAC、ADC、实时时钟及温度传感器等器件的SPI接口的时序都有所不同,为了能够满足不同的接口需要,采用时钟的极性和相位可配就能够调整SPi的通信时序。
SPI设各传输数据过程中总是先发送或接收高字节数据,每个时钟周期接收器或收发器左移1位数据。对于小于16位的数据在发送之前必须左对齐,如果接收的数据小于16位则采用软件将无效的数据位屏蔽,如图5所示。
SPI接口有主和从两种操作模式,通过MASTER/SLAVE位(SPICTL.2)选择操作模式以及SPICLK信号的来源,如图6所示。
SPI通信数据格式
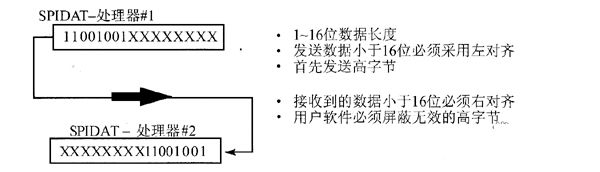
图5 SPI通信数据格式
SPI主控制器/从控制器的连接
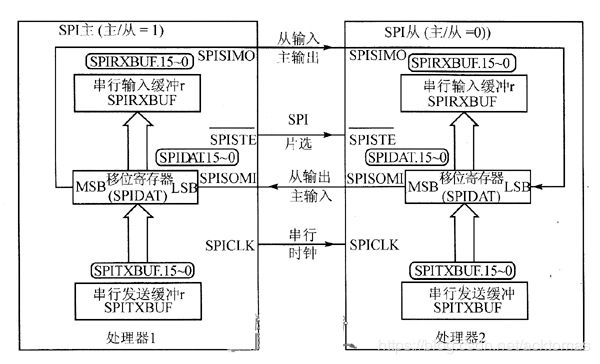
图6 SPI主控制器/从控制器的连接
3.用户逻辑
该模块针对用户不同的应用来设计,本质上就是用户的具体业务应用,与SPI-4接口没有直接关系。当应用支持多个端口时,这部分就显得至关重要。下面以支持两个端口的应用来说明用户逻辑的设计技巧。
(1)Sink Core的用户逻辑
端口为两个时,用户逻辑就需要用两个不同的FIFO根据端口的地址等来分别缓存用户的两个业务数据.同时根据FIFO的情况来发出流控信息给SP14数据接口,如图7所示。
Sink Ceore 两个端口的用户逻辑
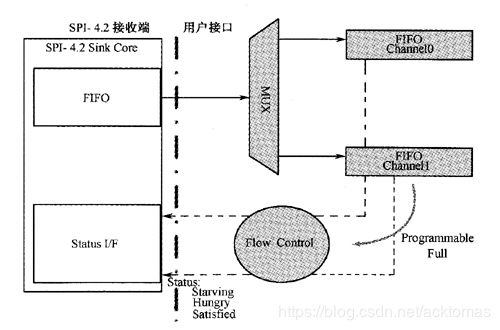
图7 Sink Ceore 两个端口的用户逻辑
(2) Source Core的用户逻辑
当端口为两个时,用户逻辑就需要根据流控信息和两个不同的FffiOffJ情况来做仲裁,谀定哪个用户逻辑FIFO需要发送给SPI4数据接口,如图8所示。
Source Core2个端口的用户逻辑
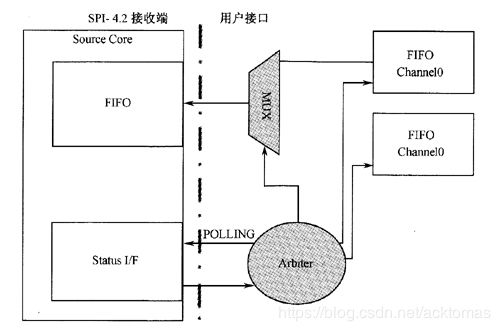
图8 Source Core2个端口的用户逻辑
4. 基本原理与结构
串行外围设备接口(SPI)是由Motorola公司开发的、用来在微控制器和外围设备芯片之间实现数据交换的低成本、易使用接口。与标准的串行接口不同,SPI是一个同步协议接口,全双工通信,所有的传输都参照一个共同的时钟,这个同步时钟信号由主机产生。接收数据的外设使用时钟对串行比特流的接收进行同步化。其传输速度可达几Mb/s。
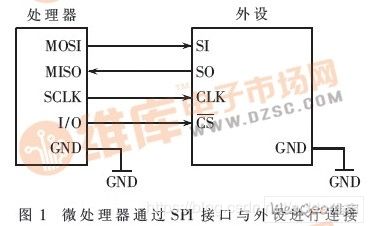
SPI主要使用4个信号:MISO(主机输入/从机输出)、MOSI(主机输出/从机输入)、 SCLK(串行时钟)、或(外设片选或从机选择)。
MISO信号由从机在主机的控制下产生。信号用于禁止或使能外设的收发功能。为高电平时,禁止外设接收和发送数据;为低电平时,允许外设接收和发送数据。图1所示是微处理器通过SPI与外设连接的示意图。
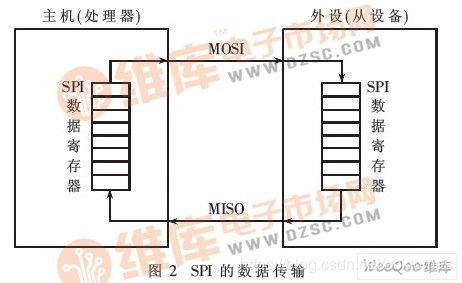
主机和从机都有一个串行移位寄存器,主机通过向它的SPI串行寄存器写入一个字节来发起一次传输。寄存器通过MOSI信号线将字节传送给从机,从机也将自己的移位寄存器中的内容通过MISO信号线返回给主机(如图2所示)。这样,两个移位寄存器中的内容就被交换。外设的写操作和读操作是同步完成的。
如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。
当主机发送一个连续的数据流时,有些外设能够进行多字节传输。多数具有SPI接口的存储芯片就以这种方式工作。在这种传输方式下,从机的片选端必须在整个传输过程中保持低电平。此时,一次传输可能会涉及到成千上万字节的信息,而不必在每个字节的数据发送的前后都去检测其起始位和结束位,这正是同步传输方式优于异步传输方式的原因所在。
虽然SPI有以上优点,然而在图像传输中却很少用到,原因主要是其抗干扰能力差。SPI采用的是单端非平衡的传输方式,即传输的数据位的电压电平是以公共地作为参考的。在这种传输方式中,对于已进入信号中的干扰是无法消除和减弱的。而信号在传输过程中总会受到干扰,而且距离越长干扰越严重,以致于信号传输产生错误。在这种条件下,信号传输就变得毫无意义了。另外,由于单端非平衡传输方式以公共地作为参考点,地线作为信号回流线,因此也存在信号电流。当传输线两端的系统之间存在交流电位差时,这个电位差将直接窜到信号中,形成噪声干扰。所以,为了解决抗干扰问题,通常采用平衡传输(balanced transmission)方式,这里采用比较常见的RS-422。
5. 相关技术资料
- 基于SPI接口提高通道密度的解决方案
- 嵌入式硬件通信接口协议-SPI(二)分层架构设计模拟接口
- IIC vs SPI,小协议隐含大智慧
- 单片机SPI总线时序详解
- 一文读懂 4 线 SPI接口
6. spi针脚
The following table display on which pins the SPI lines are broken out on the different Arduino boards:
| Arduino / Genuino Board | MOSI | MISO | SCK | SS (slave) | SS (master) | Level |
|---|---|---|---|---|---|---|
| Uno or Duemilanove | 11 or ICSP-4 | 12 or ICSP-1 | 13 or ICSP-3 | 10 | - | 5V |
| Mega1280 or Mega2560 | 51 or ICSP-4 | 50 or ICSP-1 | 52 or ICSP-3 | 53 | - | 5V |
| Leonardo | ICSP-4 | ICSP-1 | ICSP-3 | - | - | 5V |
| Due | ICSP-4 | ICSP-1 | ICSP-3 | - | 4, 10, 52 | 3,3V |
| Zero | ICSP-4 | ICSP-1 | ICSP-3 | - | - | 3,3V |
| 101 | 11 or ICSP-4 | 12 or ICSP-1 | 13 or ICSP-3 | 10 | 10 | 3,3V |
| MKR1000 | 8 | 10 | 9 | - | - | 3,3V |
Note that MISO, MOSI, and SCK are available in a consistent physical location on the ICSP header; this is useful, for example, in designing a shield that works on every board.
