【FreeRTOS学习06】深度解剖中断与任务之间同步的具体使用场景
嵌入式系统中中断是必不可少的一部分;
【FreeRTOS实战汇总】小白博主的RTOS学习实战快速进阶之路(持续更新)
文章目录
- 1 前言
- 2 中断特点
- 3 延迟中断处理
- 3.1 信号量的使用
- 3.2 vSemaphoreCreateBinary
- 3.3 xSemaphoreTake
- 3.4 xSemaphoreGiveFromISR
- 4 计数信号量
- 5 总结
1 前言
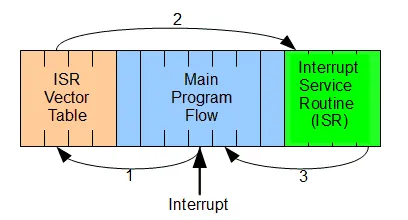
本文会在中断基础上对FreeRTOS的中断管理做一个介绍,读者需要掌握中断的概念,本文暂不会对此进行深入介绍;再操作系统中,中断随处可见,从Windows的中断,Linux的中断,以及RTOS的中断,其处理过程都是相同的;无论是软件中断还是硬件中断,在接收到中断源发出的中断请求之后,就会触发中断,CPU寻找中断向量表,然后跳转到中断服务函数,具体如下所示;
什么是中断源,通常就PC来说,中断源可以是以下几种:
- I/O设备:鼠标,键盘等等;
- 定时器中断;
- 内部故障产生的中断;
- CPU主动中断,比如调试程序,单步执行的情况;
那么,如何在中断服务函数和RTOS的任务之间,安全地完成数据的交互呢?下面会进一步介绍。
2 中断特点
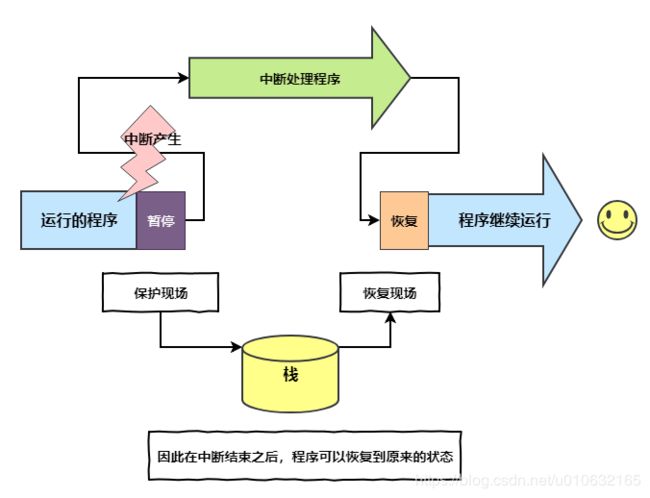
中断发生的时候,会打断正常执行的函数,这时候就会进行现场保护,即将当前各个寄存器的值压到入栈,执行玩中断之后恢复现场,即出栈,重新恢复各个寄存器的值,系统还原到中断之前的状态;具体如下图所示;
FreeRTOS中,中断需要注意几点:
- 事件的检测,除了中断方式,还可以通过轮询方式,需要更加具体的情况进行选择;
- 何时使用中断;中断服务函数(
ISR)要处理的数据量有多大,通常我们希望中断的切换越快越好,也就是说,ISR尽量采用耗时较少的处理方式; - 事件如何通知到任务(和中断服务函数区别开,非
ISR函数),如何设计程序的架构可以完成良好的异步处理过程; - 事件通知的时候需要注意使用
FreeRTOS提供的中断安全API,通常这些函数接口的后缀为xxxxxISR(),例如xQueueSendFrom;
3 延迟中断处理
上面提到过,中断服务函数应该尽量断,因此这里才用中断的前部和中断的后部来处理;
- 前部:负责处理不耗时的操作,比如任务的同步,发送信号量去通知任务;
- 后部:负责处理耗时的操作,这时候,中断已经恢复现场,实际执行可以视为软中断,即在一个
Task任务中执行;
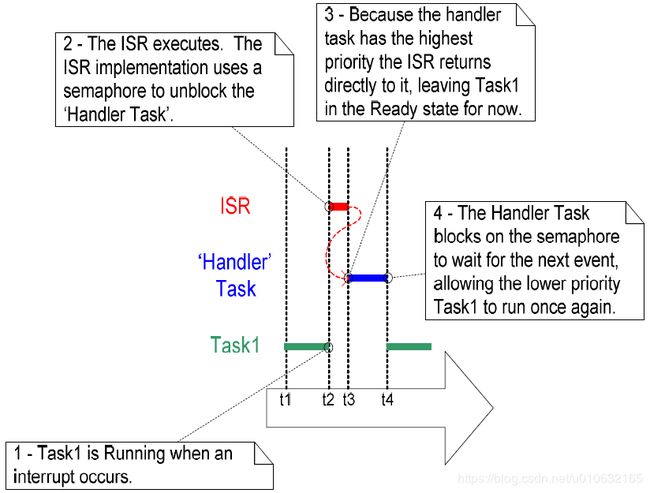
上述的方式也可以称之为延迟中断处理,具体的思路是:对应的中断创建一个相应的handler task,使用二值信号量去同步,在某个特殊的中断发生时,发送信号量,让任务解除阻塞,相当于让任务与中断同步。这样就可以让中断事件处理量大的工作在同步任务中完成,中断服务例程(ISR)中只是快速处理少部份工作,几点罗列一下;
- 中断处理可以说是被推迟(deferred)到一个处理(
handler)任务中; - 如果某个中断处理要求特别紧急,其延迟处理任务的优先级可以设为最高,以保证延迟处理任务随时都抢占系统中的其它任务。
- 延迟处理任务就成为其对应的 ISR退出后第一个执行的任务,在时间上紧接着 ISR 执行,相当于所有的处理都在 ISR 中完成一样。1
具体如下所示;
3.1 信号量的使用
关于信号量(Semaphore):通俗的解释,信号量是一个数,二值信号量,互斥信号量,只能表示0和1,假设一个信号量X,两个任务A,B;
- 任务A获取了信号量,则该信号量
X被设为0,B任务都处于堵塞状态,等待A任务释放信号量; - 当
A任务释放了信号量,则该信号量X被设为1,B任务获取了信号量,则进入运行状态; 2
FreeRTOS中对于信号量操作给出了以下相应的API: - vSemaphoreCreateBinary:创建二值信号量;
- xSemaphoreTake:获取信号量;
- xSemaphoreGiveFromISR:发送信号量;
这是一组宏定义,具体的实现在头文件semphr.h中,下面进一步介绍;
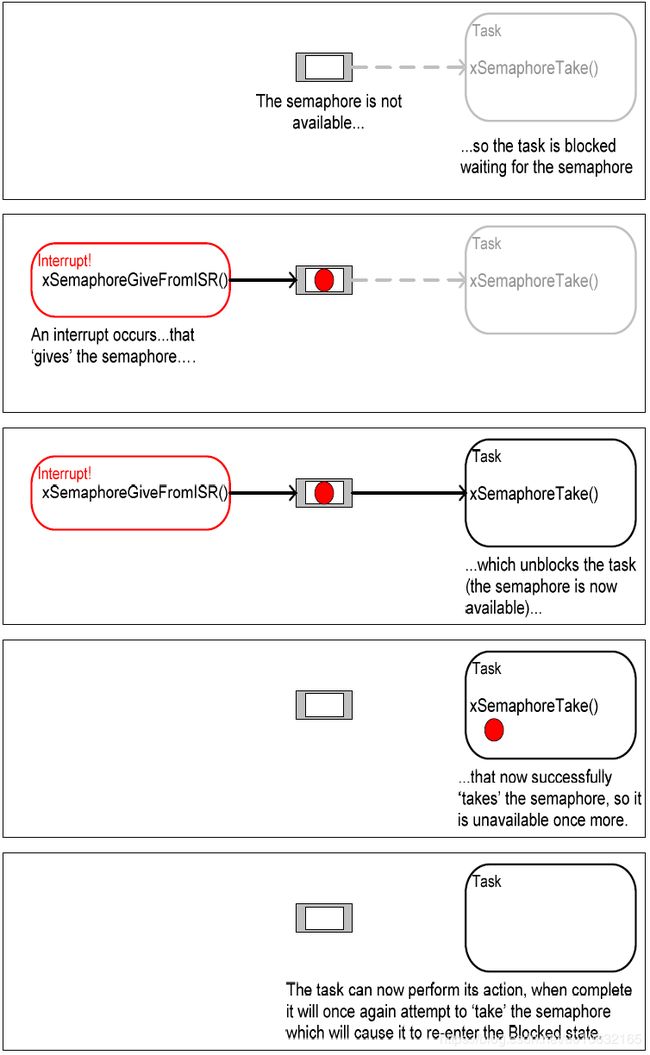
通常信号量的同步操作如下图所示;
3.2 vSemaphoreCreateBinary
FreeRTOS 中各种信号量的句柄都存储在 xSemaphoreHandle类型的变量中,在使用信号量之前,必须先通过vSemaphoreCreateBinary创建信号量,其具体函数原型如下;
#if( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
#define vSemaphoreCreateBinary( xSemaphore ) \
{ \
( xSemaphore ) = xQueueGenericCreate( ( UBaseType_t ) 1, semSEMAPHORE_QUEUE_ITEM_LENGTH, queueQUEUE_TYPE_BINARY_SEMAPHORE ); \
if( ( xSemaphore ) != NULL ) \
{ \
( void ) xSemaphoreGive( ( xSemaphore ) ); \
} \
}
#endif
可以看到这个接口是通过调用xQueueGenericCreate函数创建了大小为1个semSEMAPHORE_QUEUE_ITEM_LENGTH的信号量,并且创建成功之后,通过xSemaphoreGive将信号量设置为1,此时信号量有效;
3.3 xSemaphoreTake
“带走(Taking)”一个信号量意为”获取(Obtain)”或”接收(Receive)”信号量。只有当信号量有效的时候才可以被获取。在经典信号量术中,xSemaphoreTake()等同于一次P()操作。函数原型如下所示;
#define xSemaphoreTake( xSemaphore, xBlockTime ) \
xQueueSemaphoreTake( ( xSemaphore ), ( xBlockTime ) )
3.4 xSemaphoreGiveFromISR
xSemaphoreGiveFromISR()是 xSemaphoreGive()的特殊形式, 专门用于中断服务函数中,其函数原型如下;
#define xSemaphoreGiveFromISR( xSemaphore, pxHigherPriorityTaskWoken ) \
xQueueGiveFromISR( ( QueueHandle_t ) ( xSemaphore ), ( pxHigherPriorityTaskWoken ) )
4 计数信号量
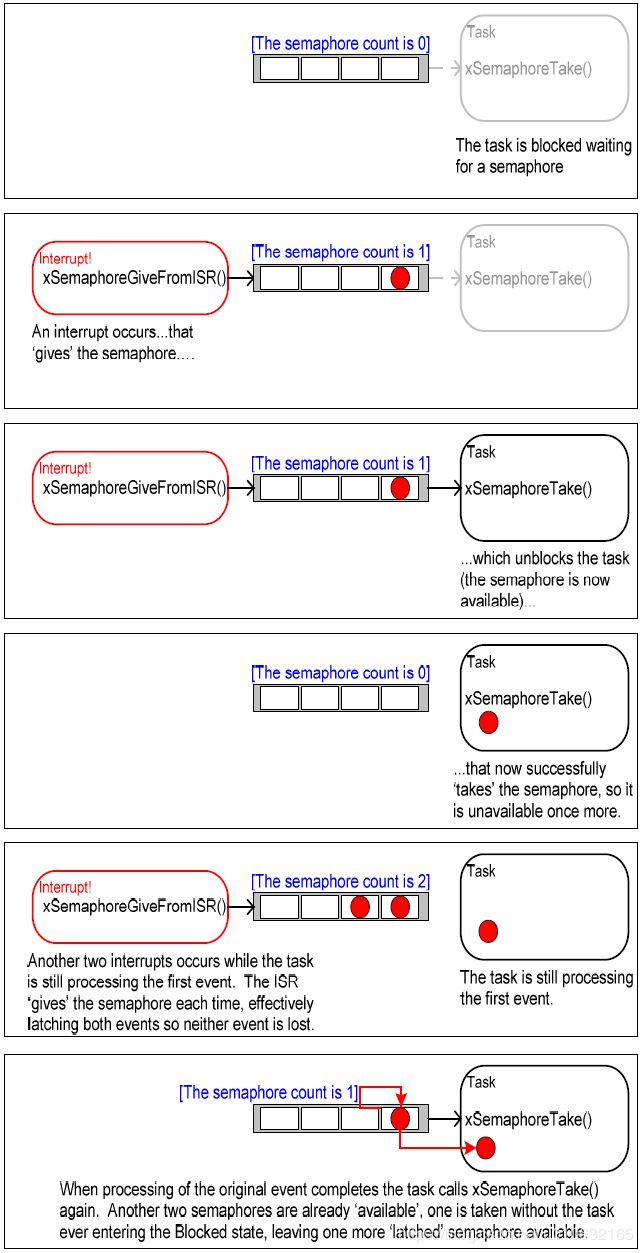
上面讲的二值信号量最多只能锁存一个事件,通俗的讲只能进行一对一的触发,也就是说在中断频率相对较低的情况下,使用二值信号量是比较完美的,但是在中断频率较高的情况下,会出现这种情况:
- 产生了中断,任务A获取信号量,并开始运行;
- 新的中断产生,任务A还没有运行结束(任务A占有了信号量),此时信号量无效,因此这个中断信号没有处理就丢失了;
这里通过使用计数信号量可以解决这种情况,通过使用xSemaphoreCreateCounting函数,函数原型如下所示;
#if( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
#define xSemaphoreCreateCounting( uxMaxCount, uxInitialCount ) \
xQueueCreateCountingSemaphore( ( uxMaxCount ), ( uxInitialCount ) )
#endif
创建一个计数信号量;
xCountingSemaphore = xSemaphoreCreateCounting( 10, 0 );
具体中断和任务通过计数信号量的同步过程可以参考下图;
5 总结
本文对FreeRTOS中如何对中断服务函数和任务进行同步做了简单介绍,分析了通过二值信号量和计数信号量这两种场景的应用和注意事项,另外作者能力有限,难免存在错误和纰漏,请不吝赐教。
Mastering_the_FreeRTOS_Real_Time_Kernel-A_Hands-On_Tutorial_Guide ↩︎
FREERTOS 实时内核实用指南,Zou Changjun ↩︎