信标组裁判系统原理与实现
摘要:
大学生智能汽车中的信标组要求裁判系统能够自动判断车模是否接近信标并控制信标依次点亮。本文提出了一套裁判系统的设计方案,应用了基于电磁感应原理的方法检测车模是否接近信标,并设计了特殊的信标枚举过程使得串联信标能够自动分配地址。方法原理简单,实施方便。通过系统测试验证了系统能够适应不同的场合,满足比赛的要求。
关键字: 智能车竞赛,电磁感应,信标,枚举
1. 前言
国内每年一度广泛开展的大学生智能汽车竞赛是由国家教育部委托高等学校自动化专业教学委员会举办的面向大学生的具有探索性的工程实践活动。第十一届竞赛首次引入了信标组的竞赛内容[1]。信标组不再设置定宽的比赛赛道,而是在比赛场地内设置若干信标来发送闪烁的红光和调制的红外光线。同一时刻,场地内只有一个信标点亮,比赛的车模搜索并驶近信标。比赛系统一方面对于比赛进行计时,另一方面控制信标的点亮顺序。控制方法为每当系统检测到车模靠近正在点亮信标,则熄灭该信标并按照一定顺序自动切换到下一个信标使其点亮。该赛题组赋予了比赛更大的自由空间和挑战难度。
参赛选手参赛前除了需要制作能够进行信标追踪的车模外还需要制作信标帮助调试。通常方法是按照规则制作几个简易的手动控制的信标,这些虽然基本满足比赛要求,但是效率不高,且无法完全模块比赛过程。如果能够制作一套满足比赛要求的自动化比赛裁判系统,则可大大提高车模后期调试的效率。本文将介绍一套信标裁判系统的制作方案。该方案符合竞赛规则要求,并具有以下两大特点:
采用基于电磁感应原理的方法检测车模是否到达信标边界范围(直径45厘米圆形区域)。检测精度高,响应灵敏;
所有信标串行连接在一起,现场布线简便。系统会自动枚举信标,无需手工设置信标信息;
本文后续内容在介绍比赛系统的整体构成之后,将详细讨论系统两大关键技术:车模接近检测和信标自动枚举的原理和实现方案,最后介绍比赛系统的计算机接口和人工操作界面。
2. 系统整体构成
2.1 系统构成
信标组比赛系统由场内信标、总线、电源模块以及计算机组成。
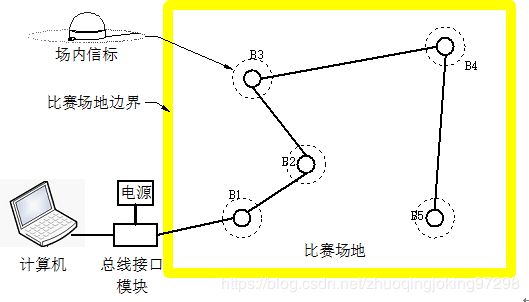
场内信标 由一条总线串接起来,距离总线接口由近至远它们的地址从1开始逐步递增。
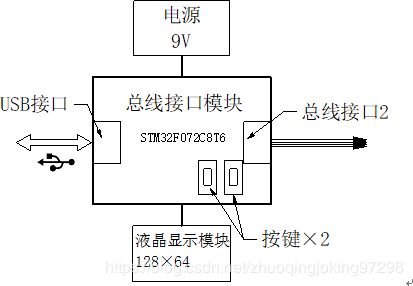
总线接口模块负责提供总线工作电源(9V)、现场总线驱动、USB总线接口、按钮和LCD手工操作界面。通过现场总线,接口模块可以检测场内信标的工作状态、发送控制命令,控制比赛进程并计时。总线接口模块框图如下图所示:
计算机运行比赛裁判软件,通过USB控制总线接口模块。
2.2 信标
场地信标的功能主要包括两个:
发射红光和红外光信号。红光的闪烁频率为10Hz,红外光的调制频率为40kHz。调制的红外光是为了便于车模利用常见的红外线接收管检测信标方位。
检测车模是否接近信标。竞赛规则为当车模上磁标进入信标周围直径为45厘米范围内时,则认为车模已经接近信标,比赛系统自动切换到下一个信标点亮。

场地信标检测车模是否进入检测范围内的方法是基于电磁感应原理。竞赛规则要求每辆车模在其四周布置四颗永磁铁,距离地面不超过2厘米。当任意磁铁越过线圈上方时,会引起检测线圈内部的磁通量 的改变,根据法拉第电磁感应定律,在线圈内产生感应电动势为:

其中N是线圈的匝数。通过对 的测量便可以检测车模是否进入信标附近。
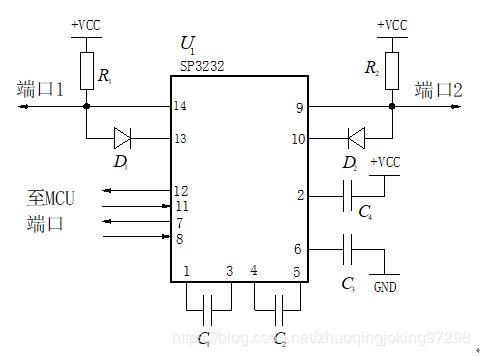
信标内部控制板结构包括主控板和LED阵列板,它们之间通过接插件连接。采用这种结构便于将来能够方便地将LED阵列板更换成别的信标形式(比如无线信标、声音信标等)。主控板具有一对总线接口和检测线圈接口。如下图所示:
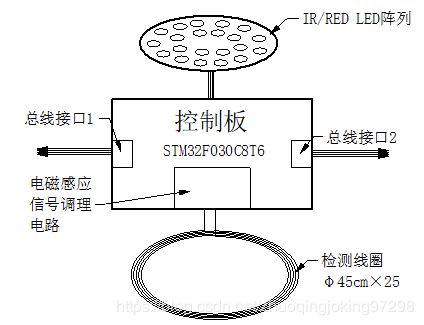
主控板以一片ARM Cortex-3的单片机为核心,完成电磁感应信号的采集处理、总线命令的执行等任务。
3. 车模接近检测与信号处理
3.1 检测电路
根据公式(1),将感应电动势进行积分便可以测量到磁通量的变化,进而可以检测车模是否越过检测线圈。

由于积分平滑作用,对于其它干扰交变磁场能够进行有效的抑制。实际电路如下图所示:
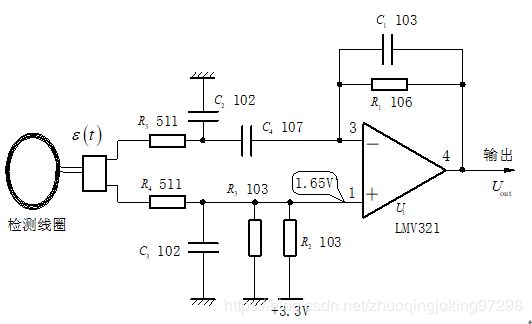
图中R1是为了积分电路稳定而并联在积分电容C1两端。C4是为了消除运放失调电压而设置的隔直电容。R4,R5,C2,C3是用于抑制外部射频信号对运放的干扰。R2,R3分压电路用于建立单电源运放的工作点。

忽略C2,C3的作用,令 R0=R1+R2,电路的传递函数为:
代入电路参数,系统的Bode图如下:

可以看出电路实际上为带通放大电路,上下截止频率分别为1.6Hz和16Hz。车模快速和慢速越过检测线产生的电磁感应信号的频谱范围大都落在上述放大电路通带范围内。
3.2 数据滤波
环境中50Hz的工频干扰信号虽然没有落在放大电路的通带范围内,但放大信号中仍然包含着较强的50Hz的干扰信号。由于该噪声信号频率固定,所以采用长度为20ms的来抑制50Hz干扰信号,使用软件实现平滑滤波。采集数据频率为1000Hz,平滑滤波窗口长度为20,对应50Hz周期时间长度。下图显示了采集数据滤波前后的波形,滤波效果明显。
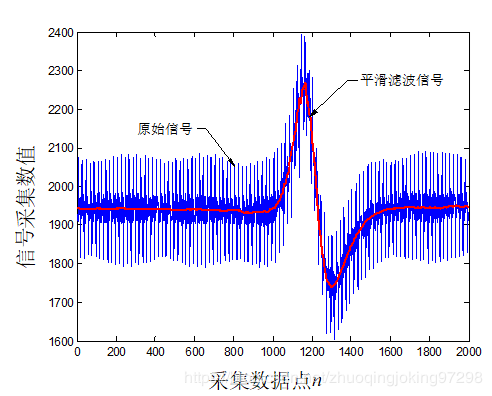
当标记磁铁经过检测线圈时放大电路产生的信号波动非常明显,可以准确反映标记磁铁是否经过检测线。进过滤波后,可以降低信号波动检测阈值,提高系统检测灵敏度。
3.3 测试结果
通过实验可以测试该方案对于不同速度,不同高度的标记磁铁经过检测线圈的检测效果。第一个实验使用一个直线滑轨带动一个永磁铁运动,永磁铁距离地面1.5厘米,分别以1米/秒至0.2米/秒的直线速度越过检测线圈边界,测量数据经过滤波后波形如下图所示:

结果显示检测信号强度随着速度的减小而降低。因此运行速度越高,该检测方法效果越好。但是有一个最低速度下限,低于该速度则无法可靠检测。通过上图可以推论,该速度下限低于0.1米/秒。这个限制远低于比赛现场车模运行速度。
第二个实验使标记磁铁以相同的速度(1米/秒)距离地面不同高度通过检测线圈。测量数据如下图所示:
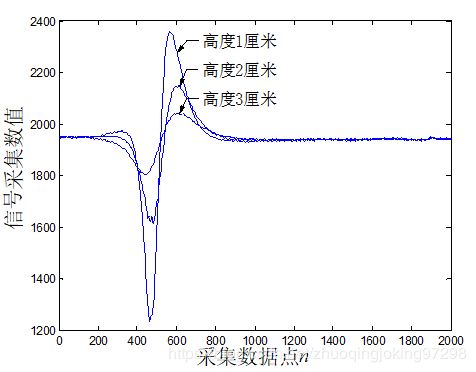
磁铁距离地面越高,检测信号幅度越小。在比赛时规则要求标记磁铁距离地面不超过2厘米。
4. 信标枚举
使用串联方法对信标进行供电和控制使得现场布线比较容易,而且布置信标数量灵活。为了实现信标按照比赛顺序依次点亮,需要确定每个信标的访问地址。按照信标串联的顺序,利用自动枚举的方法可以省略独立设置信标地址的麻烦。
实现枚举过程依靠独特的串行总线。总线的构成包括四条线,它们分别是电源线(VCC),地线(GND),命令线(CMD),反馈线(FB)。每个模块都具有两个相同的端口,反馈线由一个端口连入,从另一个端口连出。如下图所示:
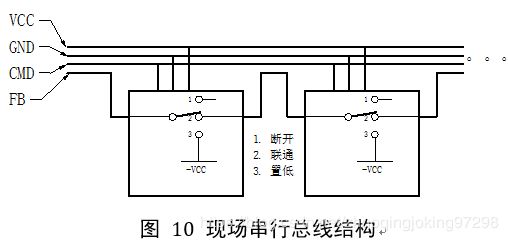
反馈线作用有三个:一是发出10ms宽的低脉冲命令响应信号;二是通过拉低反馈线指示车模越过检测线;三是用于模块枚举过程。模块内部的反馈线接口如下图所示:
反馈线平时由内部上拉电阻置成高电平。相邻两个模块之间的反馈线实际上是通过线与的关系连接在一起。通过软件控制,使得模块两个端口之间的反馈线形成虚拟的两种模式:一是断开模式,该模式用于枚举过程;二是连接模式,每当检测到一个端口中反馈线被相邻模块拉低,则将另外一个端口中的反馈线也置低。该模式用于正常工作状态,此时整条反馈线形成虚拟的一条连接总线。
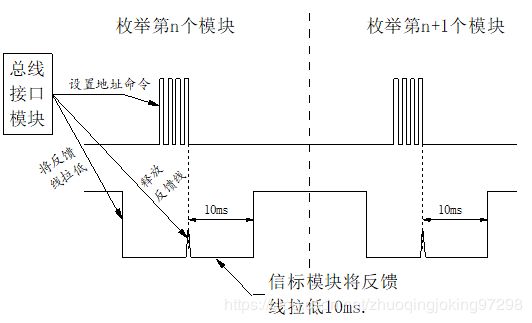
系统枚举过程是通过接口模块开展的,过程如下如下:
(1)接口模块向总线上所有信标模块发送枚举指令。接收到枚举指令后,所有模块将反馈线置于断开模式,模块端口中的反馈线都是高电平。
(2)接口模块将反馈总线置低。
(3)接口模块发送设置地址命令,地址编码从1开始。发送完毕后将反馈总线释放,并检测反馈总线是否有低电平反馈信号。
如果有反馈信号则重复2,3两步,地址编码每次递增1。如果没有检测到反馈信号,则枚举过程结束。
在此过程中,每个信标模块接收到地址设置命令后,判断它的两个总线接口中的反馈线的状态是否一致。如果反馈线状态不一致,则将本身地址设置成命令中的地址,同时发送10ms低电平进行反馈,此后将模块的反馈总线设置成连接模式。
信标枚举过程中命令线和反馈线的波形如下图所示:
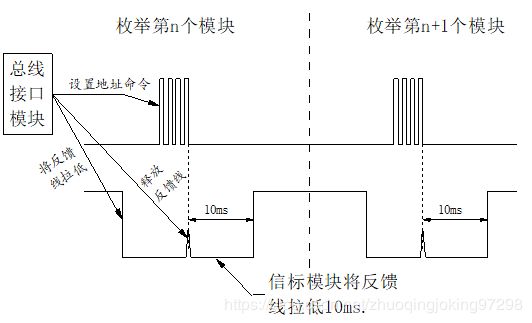
枚举过程之后,总线接口模块检查了信标的总数,设置了每个信标地址。借助于枚举过程,现场的信标可以比较灵活的进行更换和增减。
5. 系统工作模式
5.1 手工工作模式
在该模式下,通过总线接口板上的两个按钮和LCD显示屏来控制系统的枚举过程、顺序点亮比赛、随机点亮比赛以及进行系统参数的设置等。
系统参数包括线圈检测阈值、信标切换时间死区、最大比赛时间等。使得系统能够适应现场不同的电磁环境。
5.2 联机工作模式
总结接口板通过USB接口与计算机相连接。通过定义好的一组控制命令,上位机中比赛系统软件可以灵活地设置比赛中信标点亮顺序和次数,读取比赛进程时间,并设置系统参数。
通过实际的系统集成和测试,验证上述系统在不同环境下,两种工作模式都能够稳定运行。
6. 结论
信标组给智能车比赛内容的创新带来了更多的可能,但相应的比赛系统复杂度增加了。本文介绍的裁判系统原理相对简单,实施方便。感应线圈检测和信标枚举两个技术的应用提高了信标组裁判系统的检测性能和部署的灵活性。感应线圈的原理也可以应用于常规赛道比赛的计时系统。
7.参考文献
- 竞赛组委会,第十一届全国大学生智能汽车竞赛竞赛比赛规则,2015,11.
- 竞赛组委会,第十一届全国大学生智能汽车竞赛竞赛通知,2015,11