带有滤波器的数字pid控制matlab实现
前言:这一部分分为两个部分,首先介绍基于低通滤波器的信号处理,第二部分才是带有滤波器的数字pid控制matlab实现以及老规矩最后用simulink实现一下
一、基于低通滤波器的信号处理
低通滤波器为:Q(s)=1/(0.04s+1)
因为为离散系统,所以要将这个离散化,方法还是用c2d函数,只不过用的参数不在是zoh,而是使用tucsin。
直接上代码,代码很简单,说明都在注释里面:
clear all;
close all;
ts = 0.001; %采样周期
sys=tf([1],[0.04,1]); %滤波器模型
dsys = c2d(sys,ts,'tucsin');%模型离散化
[num,den]=tfdata(dsys,'v');
%获取输入
for k=1:1:5000
time(k)=k*ts;
noise(k)=0.1*sin(100*2*pi*k*ts); %信号里面的高频噪声
yinput(k)=noise(k)+0.5*sin(0.4*pi*k*ts); %混合信号
end
yout_1=0;
yinput_1=0;
for i=1:1:5000
yout(i) = -den(2)*yout_1+num(1)*yinput(i)+num(2)*yinput_1;%滤波
%更新状态
yout_1=yout(i);
yinput_1=yinput(i);
end
subplot(211);
plot(time,yinput,'k','linewidth',2);
subplot(212);
plot(time,yout,'k','linewidth',2);
结果:

二、带有滤波器的数字pid控制
被控对象模型为:G(s)=523500/(s^3 + 87.35s^2+10470s)
滤波器模型为:Q(s)=1/(0.04s+1)
噪声加在对象模型输出端,采样时间为1ms
程序中M的值用于选择选择是否用滤波器,是否加噪声。
% m=1:不加噪声
% m=2:加噪声不加滤波器
% m=3:加噪声加滤波器
代码:
clear all;
close all;
%获取控制对象离散化模型
ts = 0.001; %采样时间
sys = tf([523500],[1,87.35,10470,0]);
dsys = c2d(sys,ts,'zoh');
[num,den]=tfdata(dsys,'v');
%获取滤波器离散化模型
sys1=tf([1],[0.04,1]); %滤波器模型
dsys1 = c2d(sys1,ts,'tucsin');%模型离散化
[num1,den1]=tfdata(dsys1,'v');
y_filter_out_1=0;
y_noise_1=0;
%设置pid参数
k_p=0.2;
k_i=0.05;
%设置输入信号形式
y_d = 20*ones(1,1000); %输入信号为阶跃信号
%y_d = [ones(1,250) zeros(1,250)]; 输入信号为阶跃信号
% for k=1:1:500%输入信号为正弦信号
% y_d(k) = 0.5*sin(4*pi*k*ts);
% end
%噪声信号
for j=1:1:1000
noise(j)=5*rands(1); %信号里面的高频噪声
end
y = zeros(1,1000);%初始化输出信号
y_noise=zeros(1,1000);
y_feed=zeros(1,1000);%反馈回来的信号,y_feed=y
y_filter_out=zeros(1,1000);
erro = zeros(1,1000);%信号差值
erro_1 = 0;%上一时刻信号差值
erro_total = 0;%信号差值累计值
y_1=0;%上一时刻的输出
y_2=0;%上一上一时刻的输出
y_3=0;%上一上一上一时刻的输出
pi_out=0; %pid控制器的输出,注意不是系统输出
pi_out_1=0;%上一时刻pid控制器的输出,注意不是系统输出
pi_out_2=0;%上一上一时刻pid控制器的输出,注意不是系统输出
pi_out_3=0;%上一上一上一时刻pid控制器的输出,注意不是系统输出
% m用来选择是否用滤波器,是否加噪声。
% m=1:不加噪声
% m=2:加噪声不加滤波器
% m=3:加噪声加滤波器
M=input('input the m:');
beta=1;
if M==1
for k=1:1:1000
time(k)=k*ts; %存储时间,用于后面画图
y(k) = -den(2)*y_1-den(3)*y_2-den(4)*y_3+num(2)*pi_out_1+num(3)*pi_out_2+num(4)*pi_out_3;%控制对象
y_feed(k)= y(k);
erro(k) =y_d(k) - y_feed(k) ;
if abs(erro(k))<=0.8
erro_total = erro_total +erro(k) ;
end
if abs(erro(k))>0.8
erro_total = 0 ;
end
pi_out = erro(k) *k_p+k_i*erro_total*ts;
%更新系统输出状态
y_3=y_2;
y_2=y_1;
y_1=y(k);
%更新pid输出状态
pi_out_3=pi_out_2;
pi_out_2=pi_out_1;
pi_out_1=pi_out;
end
%画图
plot(time,y_d,'r',time,y,'k:','linewidth',2);
xlabel('time');
ylabel('y and y_d');
legend('yd','y');
end
if M==2
for k=1:1:1000
time(k)=k*ts; %存储时间,用于后面画图
y(k) = -den(2)*y_1-den(3)*y_2-den(4)*y_3+num(2)*pi_out_1+num(3)*pi_out_2+num(4)*pi_out_3 ;%控制对象
y_feed(k)= y(k)+noise(k); %注意:噪声是加载对象模型输出上的,而不是麽模型内部,模型本身的输出是正确的,只是加上了噪声后作为整个系统的输出。所以+noise(k)不能写在上面的后面
erro(k) =y_d(k) - y_feed(k) ;
if abs(erro(k))<=0.8
erro_total = erro_total +erro(k) ;
else
erro_total = 0 ;
end
pi_out = k_p*erro(k) +k_i*erro_total*ts;
%更新系统输出状态
y_3=y_2;
y_2=y_1;
y_1=y(k);
%更新pid输出状态
pi_out_3=pi_out_2;
pi_out_2=pi_out_1;
pi_out_1=pi_out;
end
%画图
plot(time,y_d,'r',time,y_feed,'k:','linewidth',2);
xlabel('time');
ylabel('y and y_d');
legend('yd','y');
end
if M==3
for k=1:1:1000
time(k)=k*ts; %存储时间,用于后面画图
y(k) = -den(2)*y_1-den(3)*y_2-den(4)*y_3+num(2)*pi_out_1+num(3)*pi_out_2+num(4)*pi_out_3 ;%控制对象
y_noise(k)= y(k)+noise(k);
y_filter_out(k) = -den1(2)*y_filter_out_1+num1(1)*y_noise(k)+num1(2)*y_noise_1;
y_feed(k)=y_filter_out(k);%注意:噪声是加载对象模型输出上的,而不是麽模型内部,模型本身的输出是正确的,只是加上了噪声后作为整个系统的输出。所以+noise(k)不能写在上面的后面
erro(k) =y_d(k) - y_feed(k) ;
if abs(erro(k))<=0.8
erro_total = erro_total +erro(k) ;
else
erro_total = 0 ;
end
pi_out = k_p*erro(k) +k_i*erro_total*ts;
%更新滤波器输出状态
y_filter_out_1=y_filter_out(k);
y_noise_1=y_noise(k);
%更新系统输出状态
y_3=y_2;
y_2=y_1;
y_1=y(k);
%更新pid输出状态
pi_out_3=pi_out_2;
pi_out_2=pi_out_1;
pi_out_1=pi_out;
end
%画图
plot(time,y_d,'r',time,y_feed,'k:','linewidth',2);
xlabel('time');
ylabel('y and y_d');
legend('yd','y');
end
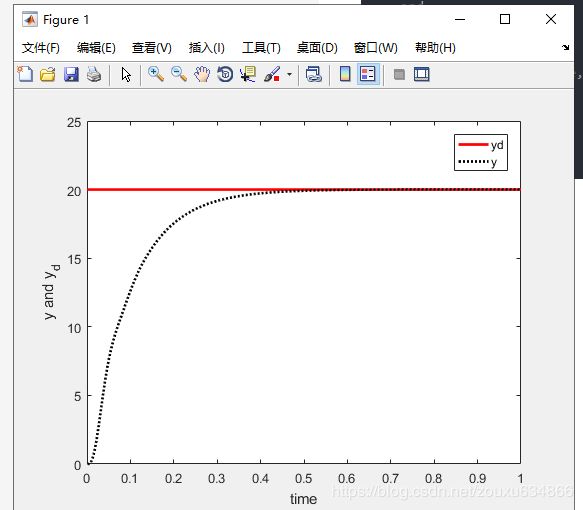
仿真结果:
没有噪声:
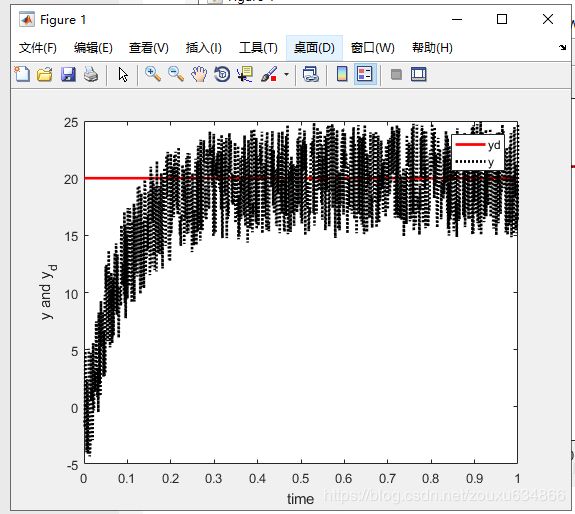
家噪声不加滤波器:
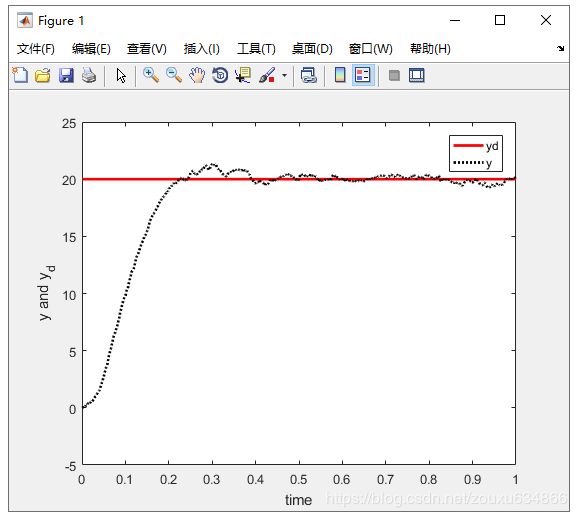
加噪声加滤波器:
说明:
1.这段程序中使用了积分分离pid,但要注意当差值小于阈值时才引入积分,另外累计差值是在引入积分时才开始算,前面未引入积分时的差值不能在在后面加上!!!比如当k=6时引入积分,此时erro_total从此时才开始算,之前k《=5的差值erro不能算。
2.搞清楚哪个是对象模型输出哪个是系统输出,加了噪声后为系统输出,是要反馈回去的。另外噪声并不影响对象模型,对象模型的差分方程y(k) = -den(2)*y_1-den(3)*y_2-den(4)*y_3+num(2)*pi_out_1+num(3)*pi_out_2+num(4)*pi_out_3中的y(k)、y_1、y_2、y_3均为对象模型的输出,千万不要将加了噪声的系统输出当做这里面的y_1、y_2、y_3带进去计算,我在这里就犯了错,我将对象模型的差分方程写成了y(k) = -den(2)*y_1-den(3)*y_2-den(4)*y_3+num(2)*pi_out_1+num(3)*pi_out_2+num(4)*pi_out_3+noise(k)显然这事错的,因为这么写的话就表示对象模型的输出与噪声有关,这事错的,噪声是在模型外部,只影响下一个模型(比如滤波器)的输入,但不会影响对象模型的输出。所以应该像上面程序中写的那样:
y(k) = -den(2)*y_1-den(3)*y_2-den(4)*y_3+num(2)*pi_out_1+num(3)*pi_out_2+num(4)*pi_out_3 ;%控制对象
y_feed(k)= y(k)+noise(k); %注意:噪声是加载对象模型输出上的,而不是麽模型内部,模型本身的输出是正确的,只是加上了噪声后作为整个系统的输出。所以+noise(k)不能写在上面的后面
erro(k) =y_d(k) - y_feed(k) ;
三、simulnik仿真

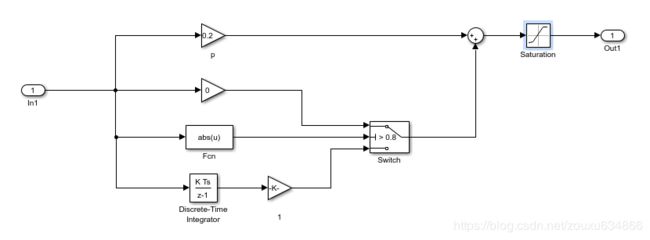

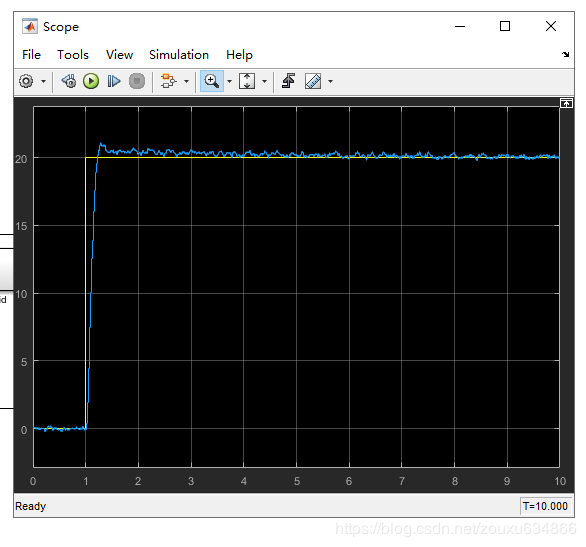
可以看出效果还是可以的。