基于Tensorflow框架CNN实现手写数字识别(一):训练模型
目前机器学习非常火热,深度学习是机器学习研究中的新领域;是基于数据的表征学习,观测值(例如一幅图像)可以是每个像素强度值的向量,或者更抽象地表示成一系列边、特定形状的区域等。 作为一种机器学习的方法已经成为了图像处理,目标检测,手写字符识别的一个热门工具; 开源的深度学习框架:Deeplearning4j(DL4j),Theano,Torch,TensorFlow,Caffe…。我选用的是Tensorflow框架,我们可以用Tensorflow框架去实现一个简单的机器学习小项目(入门级别的)。
MNIST数据集:
- 大型手写数字数据库(Modified National Institute of Standards and Technology database) 由70000张手写数字(0~9)的灰度图组成,由很多不同的人写成,包括60000张训练集和10000张测试集。
- 以由表示图像及其标签的值组成的数组的形式保存。
- 每张图片的大小是28×28像素,数字的大小是20×20像素,位于图片的中心。 Tensorflow中提供python源代码自动下载和安装
- 包含四个文件:训练集图像/标签,测试集图像/标签
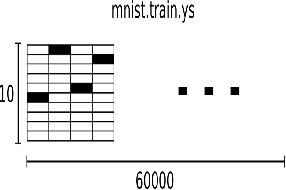
训练集图片 训练集标签图片

CNN(卷积神经网络)
- 卷积神经网络(Convolutional Neural Network, CNN)是一种前馈神经网络,它的人工神经元可以响应一部分覆盖范围内的周围单元,在大型图像的处理上有非常出色的表现。
- 相邻层的神经元间的连接是非全连接的,同一层中某些神经元之间的连接的权重是共享的,避免了要进行人工特征提取等复杂的前期预处理过程。
- 主要有两种类型的网络层,分别是卷积层和池化层。卷积层的作用是提取图像的各种特征;池化层的作用是对原始特征信号进行抽样。池化有最大池化和均值池化
简单的介绍了理论之后我们需要进行模型的训练,贴代码如下:
import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data
# mnist数据集被分成两部分:60000张的训练数据集(mnist.train)和10000张的测试数据集(mnist.test)
#准确的来说是三部分,这样的切分很重要,在机器学习模型设计时必须有一个单独的测试数据集
# 不用于训练而是用来评估这个模型的性能,从而更加容易把设计的模型推广到其他数据集上(即:泛化)
mnist = input_data.read_data_sets("MNIST_data/", one_hot=True)
#卷积使用1步长(stride size),0边距(padding size)的模板,保证输出和输入是同一个大小
def conv2d(x, W):
# 池化用简单传统的2x2大小的模板做max pooling
def max_pool_2x2(x):
# 不加padding='SAME'这个参数,运行时会出现如下报错:
# max_pool() missing 1 required positional argument: 'padding'
# return tf.nn.max_pool(x, ksize=[1, 2, 2, 1], trides=[1, 2, 2, 1],padding='SAME')
return tf.nn.max_pool(x, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
#权重初始化
def weight_variable(shape):
initial = tf.truncated_normal(shape, stddev=0.1)
return tf.Variable(initial)
#偏置量初始化
def bias_variable(shape):
initial = tf.constant(0.1, shape=shape)
return tf.Variable(initial)
#创建模型
#x为训练图像的占位符,y_为训练图像标签的占位符
x = tf.placeholder(tf.float32, [None, 784]) # 图像输入向量
y_ = tf.placeholder(tf.float32, [None, 10]) # 实际分布
W = tf.Variable(tf.zeros([784,10]))
b = tf.Variable(tf.zeros([10]))
y = tf.nn.softmax(tf.matmul(x,W) + b)
# 第一层卷积由一个卷积接一个max pooling完成。
# 卷积在每个5x5的patch中算出32个特征。卷积的权重张量是[5, 5, 1, 32],
# 前两个维度是patch的大小(5x5),接着是输入的通道数目(1),最后是输出的通道数目(32)。
W_conv1 = weight_variable([5, 5, 1, 32])
# 对于每一个输出通道都有一个对应的偏置量。故为32。
b_conv1 = bias_variable([32])
# 为了用这一层,我们把x变成一个4d向量,其第2、第3维对应图片的宽、高,
# 最后一维代表图片的颜色通道数(因为是灰度图所以这里的通道数为1,如果是rgb彩色图,则为3)。
#调整输入图片,-1表示形状第一维的大小根据x自动确定
x_image = tf.reshape(x, [-1, 28, 28, 1])
# 把x_image和权值向量进行卷积,加上偏置项,然后应用ReLU激活函数,最后进行max pooling。
h_conv1 = tf.nn.relu(conv2d(x_image, W_conv1) + b_conv1)
h_pool1 = max_pool_2x2(h_conv1)
# 第二层卷积,把几个类似的层堆叠起来,构建一个更深的网络。
# 第二层中,每个5x5的patch会得到64个特征。
W_conv2 = weight_variable([5, 5, 32, 64])
b_conv2 = bias_variable([64])
h_conv2 = tf.nn.relu(conv2d(h_pool1, W_conv2) + b_conv2)
h_pool2 = max_pool_2x2(h_conv2)
# 连接层
# 图片尺寸减小到7x7,加入一个有1024个神经元的全连接层,用于处理整个图片。
# 我们把池化层输出的张量reshape成一些向量,乘上权重矩阵,加上偏置,然后对其使用ReLU。
W_fc1 = weight_variable([7 * 7 * 64, 1024])
b_fc1 = bias_variable([1024])
h_pool2_flat = tf.reshape(h_pool2, [-1, 7 * 7 * 64])
h_fc1 = tf.nn.relu(tf.matmul(h_pool2_flat, W_fc1) + b_fc1)
# 梯度下降
# Dropout是为了减少参数数量,减少过拟合而加入。
# 用一个placeholder来代表一个神经元的输出在dropout中保持不变的概率。
keep_prob = tf.placeholder(tf.float32)
h_fc1_drop = tf.nn.dropout(h_fc1, keep_prob)
# 输出层
# 添加一个softmax层,与前面的单层softmax regression一样。
w_fc2 = weight_variable([1024, 10])
b_fc2 = bias_variable([10])
y_conv = tf.nn.softmax(tf.matmul(h_fc1_drop, w_fc2) + b_fc2)
# 训练评估模型
#交叉熵的计算
cross_entropy = -tf.reduce_sum(y_*tf.log(y_conv))
lr = tf.Variable(0.001, dtype=tf.float32)
#train_step = tf.train.AdagradOptimizer(1e-4).minimize(cross_entropy)
#梯度下降优化算法识别准确率更高,在feed_dict中加入额外的参数keep_prob来控制dropout比例。
train_step = tf.train.GradientDescentOptimizer(1e-4).minimize(cross_entropy)
correct_prediction = tf.equal(tf.argmax(y_conv, 1), tf.argmax(y_, 1))
accuracy = tf.reduce_mean(tf.cast(correct_prediction, tf.float32))
saver = tf.train.Saver() #定义saver,保存模型
#初始化变量,分配内存
sess = tf.InteractiveSession()
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
for i in range(20000):
#batch粗略理解成表示一次训练的图片数量,不是越大越好,也不是越小越好,一般为50,(电脑貌似设100准确率比较高,但是卡)
#自身电脑内存过小,分batch训练时小点比较好
batch = mnist.train.next_batch(50)
if i % 200 == 0:
#后期大约4分钟输出一轮
train_accuracy = accuracy.eval(session=sess,feed_dict={x: batch[0], y_: batch[1], keep_prob: 1.0})
print("step %d, training accuracy %g" % (i, train_accuracy))
sess.run(train_step, feed_dict={x: batch[0], y_: batch[1], keep_prob: 0.5})
# 模型储存位置,未使用正则化
saver.save(sess, 'E:/pycharm/GraduationDesign/log/step15000.ckpt')
print('test accuracy %g' % accuracy.eval(session=sess,feed_dict={x:mnist.test.images,
y_:mnist.test.labels,keep_prob:1.0}))
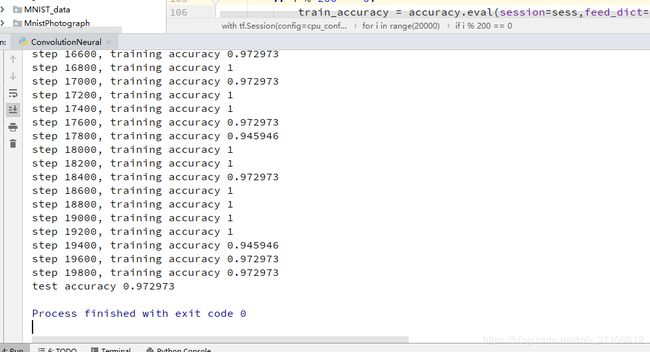
迭代两万次后的结果如下: