维纳滤波器
维纳滤波器
文章目录
- 维纳滤波器
- 1.wiener filter
- 2.code
- 3.求导计算
1.wiener filter
维纳滤波器是一个均方误差最小准则下的最优滤波器,定义一个离散线性时不变系统,输入 x ( n ) x(n) x(n)、输出 y ^ ( n ) \hat y(n) y^(n),参考信号 d ( n ) d(n) d(n)
误差信号
e ( n ) = y ^ ( n ) − d ( n ) (1) e(n)=\hat y(n)-d(n)\tag1 e(n)=y^(n)−d(n)(1)
定义长度 M M M的FIR滤波器 h \bold h h如下
h = [ h 0 , h 1 . . . . . h M − 1 ] T y ^ ( n ) = ∑ m = 0 M − 1 x ( n − m ) ∗ h ( m ) (2) \begin{aligned} \bold h&=[h_0,h_1.....h_{M-1}]^T\\ \hat y(n)&=\sum_{m=0}^{M-1}{x(n-m)*h(m)} \end{aligned}\tag2 hy^(n)=[h0,h1.....hM−1]T=m=0∑M−1x(n−m)∗h(m)(2)
维纳滤波器的目标寻找一组滤波器系数使误差信号的均方误差最小
h = a r g m i n E [ e 2 ( n ) ] (3) \bold h=argminE[e^2(n)]\tag3 h=argminE[e2(n)](3)
其中E为数学期望,将(3)式展开
E [ e 2 ( n ) ] = E [ ( y ^ ( n ) − d ( n ) 2 ] = E [ y ^ 2 ( n ) ] − 2 ∗ E [ y ^ ( n ) ∗ d ( n ) ] + E [ d 2 ( n ) ] (4) \begin{aligned} E[e^2(n)]&=E[(\hat y(n)-d(n)^2]\\ &=E[\hat y^2(n)]-2*E[\hat y(n)*d(n)]+E[d^2(n)] \end{aligned}\tag4 E[e2(n)]=E[(y^(n)−d(n)2]=E[y^2(n)]−2∗E[y^(n)∗d(n)]+E[d2(n)](4)
代入 y ^ ( n ) \hat y(n) y^(n),继续
E [ e 2 ( n ) ] = E [ ( ∑ m = 0 M − 1 x ( n − m ) ∗ h ( m ) ) 2 ] − 2 ∗ E [ ( ∑ m = 0 M − 1 x ( n − m ) ∗ h ( m ) ) ∗ d ( n ) ] + E [ d 2 ( n ) ] , (5) \begin{aligned} E[e^2(n)]=&E[(\sum_{m=0}^{M-1}{x(n-m)*h(m)})^2]-\\ &2*E[(\sum_{m=0}^{M-1}{x(n-m)*h(m)})*d(n)]+\\ &E[d^2(n)],\\ \end{aligned}\tag5 E[e2(n)]=E[(m=0∑M−1x(n−m)∗h(m))2]−2∗E[(m=0∑M−1x(n−m)∗h(m))∗d(n)]+E[d2(n)],(5)
误差函数对各权值求偏微分,这个复合函数求导可看这里
Δ E [ e 2 ( n ) ] h i = 2 E [ ∑ m = 0 M − 1 x ( n − m ) ∗ h ( m ) ∗ x ( n − i ) ] − 2 E [ x ( n − i ) d ( n ) ] , = 2 ∑ m = 0 M − 1 E [ x ( n − m ) ∗ x ( n − i ) ] ∗ h ( m ) − 2 E [ x ( n − i ) d ( n ) ] , i = 0 , 1.... M − 1 (6) \begin{aligned} \frac{\Delta E[e^2(n)]}{h_i}=2&E[\sum_{m=0}^{M-1}{x(n-m)*h(m)}*x(n-i)]-\\2&E[x(n-i)d(n)],\\ =2&\sum_{m=0}^{M-1}E[x(n-m)*x(n-i)]*h(m)-\\2&E[x(n-i)d(n)], i=0,1....M-1\\ \end{aligned}\tag6 hiΔE[e2(n)]=22=22E[m=0∑M−1x(n−m)∗h(m)∗x(n−i)]−E[x(n−i)d(n)],m=0∑M−1E[x(n−m)∗x(n−i)]∗h(m)−E[x(n−i)d(n)],i=0,1....M−1(6)
这里假设 x ( n ) 和 d ( n ) x(n)和d(n) x(n)和d(n)为平稳随机过程且联合平稳,则有自相关函数 r x x r_{xx} rxx和互相关函数 r x d r_{xd} rxd如下
r x x ( m ) = E [ x ( n ) x ( n − m ) ] r x d ( m ) = E [ x ( n ) d ( n − m ) ] (7) \begin{aligned} r_{xx}(m)&=E[x(n)x(n-m)]\\ r_{xd}(m)&=E[x(n)d(n-m)] \end{aligned}\tag7 rxx(m)rxd(m)=E[x(n)x(n−m)]=E[x(n)d(n−m)](7)
上式中m为第二个信号相对第一个信号的延时,平稳随机信号的相关函数只与信号的延时有关,与信号的起始位置无关,则(6)使可以去掉期望符号重写成
Δ E [ e 2 ( n ) ] h i = 2 ∑ m = 0 M − 1 r x x ( i − m ) ∗ h ( m ) − 2 r x d ( − i ) , i = 0 , 1.... M − 1 (8) \begin{aligned} \frac{\Delta E[e^2(n)]}{h_i}=2&\sum_{m=0}^{M-1}r_{xx}(i-m)*h(m)-\\ 2&r_{xd}(-i), i=0,1....M-1\\ \end{aligned}\tag8 hiΔE[e2(n)]=22m=0∑M−1rxx(i−m)∗h(m)−rxd(−i),i=0,1....M−1(8)
当均方误差最小时,(8)式中的导数等于0,
∑ m = 0 M − 1 r x x ( i − m ) ∗ h ( m ) = r x d ( − i ) , i = 0 , 1.... M − 1 (9) \sum_{m=0}^{M-1}r_{xx}(i-m)*h(m)=r_{xd}(-i), i=0,1....M-1\tag9 m=0∑M−1rxx(i−m)∗h(m)=rxd(−i),i=0,1....M−1(9)
(9)式就是Wiener–Hopf equations,注意,写这个式子的时候要注意与相关函数的定义对应起来,有的地方定义 r x d ( m ) = E [ x ( n ) x ( n − m ) ] r_{xd}(m)=E[x(n)x(n-m)] rxd(m)=E[x(n)x(n−m)],或者 r d x ( m ) = E [ x ( n ) x ( n + m ) ] r_{dx}(m)=E[x(n)x(n+m)] rdx(m)=E[x(n)x(n+m)],自相关函数是偶对称的( r x x ( i − j ) = r x x ( j − i ) r_{xx}(i-j)=r_{xx}(j-i) rxx(i−j)=rxx(j−i)),而互相关并不对称, r x d ( k ) = r d x ( − k ) r_{xd}(k)=r_{dx}(-k) rxd(k)=rdx(−k),因此要注意(9)式的符号。
继续,将(9)式写成矩阵的形式
R ∗ h = r d x (10) \mathbf{R}*\mathbf{h}=\mathbf{r_{dx}}\tag{10} R∗h=rdx(10)
展开表示为
[ r ( 0 ) r ( 1 ) ⋯ r ( M − 1 ) r ∗ ( 1 ) r ( 0 ) ⋯ r ( M − 2 ) ⋮ ⋮ ⋱ ⋮ r ∗ ( M − 1 ) r ∗ ( M − 2 ) ⋯ r ( 0 ) ] ∗ [ h 0 h 1 ⋮ h M − 1 ] = [ r d x ( 0 ) r d x ( 1 ) ⋮ r d x ( M − 1 ) ] (11) \left[\begin{array}{cccc}{r(0)} & {r(1)} & {\cdots} & {r(M-1)} \\ {r^{*}(1)} & {r(0)} & {\cdots} & {r(M-2)} \\ {\vdots} & {\vdots} & {\ddots} & {\vdots} \\ {r^{*}(M-1)} & {r^{*}(M-2)} & {\cdots} & {r(0)}\end{array}\right]* \begin{bmatrix} h_0\\ h_1\\ {\vdots}\\ h_{M-1} \end{bmatrix}= \begin{bmatrix} r_{dx}(0)\\ r_{dx}(1)\\ {\vdots}\\ r_{dx}(M-1) \end{bmatrix}\tag{11} ⎣⎢⎢⎢⎡r(0)r∗(1)⋮r∗(M−1)r(1)r(0)⋮r∗(M−2)⋯⋯⋱⋯r(M−1)r(M−2)⋮r(0)⎦⎥⎥⎥⎤∗⎣⎢⎢⎢⎡h0h1⋮hM−1⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡rdx(0)rdx(1)⋮rdx(M−1)⎦⎥⎥⎥⎤(11)
这样,维纳滤波在时域的闭式解就为
h o p t = R − 1 ∗ r d x (12) \mathbf{h_{opt}}=\mathbf{R}^{-1}*\mathbf{r_{dx}}\tag{12} hopt=R−1∗rdx(12)
计算这个式子需要观测信号的 M ∗ M M*M M∗M自相关矩阵跟观测信号和期望信号 M ∗ 1 M*1 M∗1的互相关函数
同样,将最优解代入到误差函数中,可以得到最小均方误差如下
E [ e 2 ( n ) ] m i n = σ d 2 − r d x H h o p t = σ d 2 − r d x H R − 1 r d x \begin{aligned} E[e^2(n)]_{min} &= \sigma_d^2-\mathbf{r_{dx}}^H\mathbf{h_{opt}}\\ &=\sigma_d^2-\mathbf{r_{dx}}^H\mathbf{R}^{-1}\mathbf{r_{dx}} \end{aligned} E[e2(n)]min=σd2−rdxHhopt=σd2−rdxHR−1rdx
2.code
在MATLAB里验证一下维纳滤波器闭式解
% clear all
close all
T = 100000;
x = randn(T,1);
%
h = [1.2,4.7,3.6,5.5,0.8]';
M = length(h);
d = filter(h,1,x);
[r,lag1] = xcorr(x,'unbiased');
R = zeros(5,5);
% 利用相关函数的值计算相关矩阵
for i = 1:5
for j = 1:5
R(i,j) = r(find(lag1==(i-j)));
end
end
[p,lag2] = xcorr(x,d,'unbiased');
P = zeros(M,1);
for i = 0:M-1
P(i+1) = p(find(lag2==(i*-1)));
end
h
h_opt = R\P
e_min = var(d)-P'*h_opt
figure,stem(h)
hold on,plot(h_opt)
legend('filter weighs','estimated weights');
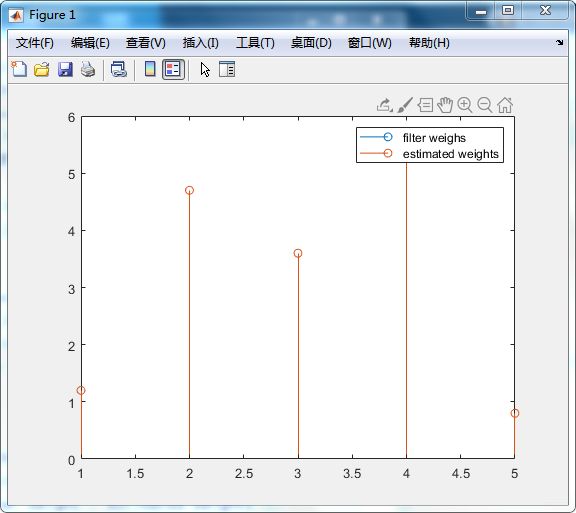
从结果上看,闭式解求得的权值和实际权值一致。代码里调用了matlab的xcorr函数,在取互相关函数值的位置(lag)时要,注意互相关函数的定义与闭式解的形式一致
3.求导计算
这里记录一下误差函数的求导
E [ e 2 ( n ) ] = E [ ( ∑ m = 0 M − 1 x ( n − m ) ∗ h ( m ) ) 2 ] − 2 ∗ E [ ( ∑ m = 0 M − 1 x ( n − m ) ∗ h ( m ) ) ∗ d ( n ) ] + E [ d 2 ( n ) ] , (13) \begin{aligned} E[e^2(n)]=&E[(\sum_{m=0}^{M-1}{x(n-m)*h(m)})^2]-\\ &2*E[(\sum_{m=0}^{M-1}{x(n-m)*h(m)})*d(n)]+\\ &E[d^2(n)],\\ \end{aligned}\tag{13} E[e2(n)]=E[(m=0∑M−1x(n−m)∗h(m))2]−2∗E[(m=0∑M−1x(n−m)∗h(m))∗d(n)]+E[d2(n)],(13)
这里就只看第一个求和式子
f ( n ) = E [ ( ∑ m = 0 M − 1 x ( n − m ) ∗ h ( m ) ) 2 ] = E [ g 2 ( n ) ] \begin{aligned} f(n)& = E[(\sum_{m=0}^{M-1}{x(n-m)*h(m)})^2]\\ &=E[g^2(n)] \end{aligned} f(n)=E[(m=0∑M−1x(n−m)∗h(m))2]=E[g2(n)]
要计算 ∂ f ( n ) ∂ h ( m ) \frac{\partial f(n)}{\partial h(m)} ∂h(m)∂f(n),
∂ f ( n ) ∂ h ( m ) = E [ 2 ∗ g ( n ) ∗ ∂ g ( n ) ∂ h ( m ) ] (14) \begin{aligned} \frac{\partial f(n)}{\partial h(m)}&=E[2*g(n)*\frac{\partial g(n)}{\partial h(m)}]\\ \end{aligned}\tag{14} ∂h(m)∂f(n)=E[2∗g(n)∗∂h(m)∂g(n)](14)
再计算 ∂ g ( n ) ∂ h ( m ) \frac{\partial g(n)}{\partial h(m)} ∂h(m)∂g(n)
g ( n ) = ∑ m = 0 M − 1 x ( n − m ) ∗ h ( m ) = x ( n ) h ( 0 ) + x ( n − 1 ) h ( 1 ) ⋯ x ( 0 ) h ( M − 1 ) ∂ g ( n ) ∂ h ( 0 ) = x ( n ) ∂ g ( n ) ∂ h ( 1 ) = x ( n − 1 ) ⋮ ∂ g ( n ) ∂ h ( i ) = x ( n − i ) ⋮ ∂ g ( n ) ∂ h ( M − 1 ) = x ( n − M + 1 ) \begin{aligned} g(n)&=\sum_{m=0}^{M-1}{x(n-m)*h(m)} \\ &=x(n)h(0)+x(n-1)h(1) \cdots x(0)h(M-1)\\ \frac{\partial g(n)}{\partial h(0)}&=x(n)\\ \frac{\partial g(n)}{\partial h(1)}&=x(n-1)\\ \vdots\\ \frac{\partial g(n)}{\partial h(i)}&=x(n-i)\\ \vdots\\ \frac{\partial g(n)}{\partial h(M-1)}&=x(n-M+1)\\ \end{aligned} g(n)∂h(0)∂g(n)∂h(1)∂g(n)⋮∂h(i)∂g(n)⋮∂h(M−1)∂g(n)=m=0∑M−1x(n−m)∗h(m)=x(n)h(0)+x(n−1)h(1)⋯x(0)h(M−1)=x(n)=x(n−1)=x(n−i)=x(n−M+1)
所以
∂ g ( n ) ∂ h ( m ) = x ( n − m ) (15) \frac{\partial g(n)}{\partial h(m)}=x(n-m)\tag{15} ∂h(m)∂g(n)=x(n−m)(15)
这样将(15)带入到(14)中,得到
∂ f ( n ) ∂ h ( i ) = E [ 2 ∗ g ( n ) ∗ ∂ g ( n ) ∂ h ( i ) ] = 2 E [ g ( n ) x ( n − i ) ] = 2 E [ ∑ m = 0 M − 1 x ( n − m ) ∗ x ( m ) x ( n − i ) ] (16) \begin{aligned} \frac{\partial f(n)}{\partial h(i)}&=E[2*g(n)*\frac{\partial g(n)}{\partial h(i)}]\\ &=2E[g(n)x(n-i)]\\ &=2E[\sum_{m=0}^{M-1}{x(n-m)*x(m)x(n-i)]} \end{aligned}\tag{16} ∂h(i)∂f(n)=E[2∗g(n)∗∂h(i)∂g(n)]=2E[g(n)x(n−i)]=2E[m=0∑M−1x(n−m)∗x(m)x(n−i)](16)
这样就完成了这个复合函数的求导,都展开写看其实也挺简单,主要是期望符号和求和符号有些容易混淆
Reference:
1.《数字信号处理:时域离散随机信号处理》
2.《自适应滤波器原理》
3. https://en.wikipedia.org/wiki/Wiener_filter