PyTorch搭建卷积神经网络CNN实现MNIST手写数字识别(附代码)
首先需要对CNN网络理解,如果还不清楚卷积神经网络的可以去看,这里不做介绍https://blog.csdn.net/v_JULY_v/article/details/51812459 大神的超详细解析!
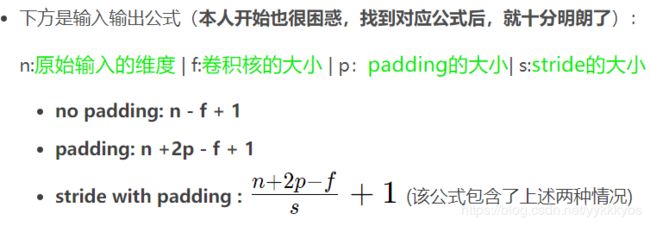
卷积层:nn.Conv2d(in_channels,out_channels,kernel_size,stride,padding)

表中后面有些参数不常用,主要是前三个的设置。
这里说一下计算:
池化层:nn.MaxPool2d()

一般来说会把池化窗口大小设为2。
下面给出完整代码的一个例子:
"""
作者:Troublemaker
功能:
版本:
日期:2020/4/5 19:57
脚本:cnn.py
"""
import torch
import torch.nn as nn
import torch.utils.data as Data
import torchvision
import matplotlib.pyplot as plt
torch.manual_seed(1)
# 设置超参数
epoches = 2
batch_size = 50
learning_rate = 0.001
# 搭建CNN
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__() # 继承__init__功能
## 第一层卷积
self.conv1 = nn.Sequential(
# 输入[1,28,28]
nn.Conv2d(
in_channels=1, # 输入图片的高度
out_channels=16, # 输出图片的高度
kernel_size=5, # 5x5的卷积核,相当于过滤器
stride=1, # 卷积核在图上滑动,每隔一个扫一次
padding=2, # 给图外边补上0
),
# 经过卷积层 输出[16,28,28] 传入池化层
nn.ReLU(),
nn.MaxPool2d(kernel_size=2) # 经过池化 输出[16,14,14] 传入下一个卷积
)
## 第二层卷积
self.conv2 = nn.Sequential(
nn.Conv2d(
in_channels=16, # 同上
out_channels=32,
kernel_size=5,
stride=1,
padding=2
),
# 经过卷积 输出[32, 14, 14] 传入池化层
nn.ReLU(),
nn.MaxPool2d(kernel_size=2) # 经过池化 输出[32,7,7] 传入输出层
)
## 输出层
self.output = nn.Linear(in_features=32*7*7, out_features=10)
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x) # [batch, 32,7,7]
x = x.view(x.size(0), -1) # 保留batch, 将后面的乘到一起 [batch, 32*7*7]
output = self.output(x) # 输出[50,10]
return output
# 下载MNist数据集
train_data = torchvision.datasets.MNIST(
root="./mnist/", # 训练数据保存路径
train=True,
transform=torchvision.transforms.ToTensor(), # 数据范围已从(0-255)压缩到(0,1)
download=False, # 是否需要下载
)
# print(train_data.train_data.size()) # [60000,28,28]
# print(train_data.train_labels.size()) # [60000]
# plt.imshow(train_data.train_data[0].numpy())
# plt.show()
test_data = torchvision.datasets.MNIST(root="./mnist/", train=False)
print(test_data.test_data.size()) # [10000, 28, 28]
# print(test_data.test_labels.size()) # [10000, 28, 28]
test_x = torch.unsqueeze(test_data.test_data, dim=1).type(torch.FloatTensor)[:2000]/255
test_y = test_data.test_labels[:2000]
# 装入Loader中
train_loader = Data.DataLoader(dataset=train_data, batch_size=batch_size, shuffle=True, num_workers=3)
def main():
# cnn 实例化
cnn = CNN()
print(cnn)
# 定义优化器和损失函数
optimizer = torch.optim.Adam(cnn.parameters(), lr=learning_rate)
loss_function = nn.CrossEntropyLoss()
# 开始训练
for epoch in range(epoches):
print("进行第{}个epoch".format(epoch))
for step, (batch_x, batch_y) in enumerate(train_loader):
output = cnn(batch_x) # batch_x=[50,1,28,28]
# output = output[0]
loss = loss_function(output, batch_y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
if step % 50 == 0:
test_output = cnn(test_x) # [10000 ,10]
pred_y = torch.max(test_output, 1)[1].data.numpy()
# accuracy = sum(pred_y==test_y)/test_y.size(0)
accuracy = ((pred_y == test_y.data.numpy()).astype(int).sum()) / float(test_y.size(0))
print('Epoch: ', epoch, '| train loss: %.4f' % loss.data.numpy(), '| test accuracy: %.2f' % accuracy)
test_output = cnn(test_x[:10])
pred_y = torch.max(test_output, 1)[1].data.numpy().squeeze()
print(pred_y)
print(test_y[:10])
if __name__ == "__main__":
main()
注意 :对于参数初始化的问题,在pytorch中,有自己默认初始化参数方式,所以在你定义好网络结构以后,不进行参数初始化也是可以的。
但如果想要初始化,可以参考如下:
def initNetParams(net):
'''Init net parameters.'''
for m in net.modules():
if isinstance(m, nn.Conv2d):
init.xavier_uniform(m.weight)
if m.bias:
init.constant(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
init.constant(m.weight, 1)
init.constant(m.bias, 0)
elif isinstance(m, nn.Linear):
init.normal(m.weight, std=1e-3)
if m.bias:
init.constant(m.bias, 0)
initNetParams(net)