1 视频总结
~机器人模块组成

~模型分类

~监督学习

~深度学习的几个不能:不稳定,易被攻击;机器偏见,无法引入有效监督;过于复杂,无法纠错修改;参数不透明;推理性差;端到端对数据依赖性强
~M-P神经元

~几种激活函数

~单层感知器

~万有逼近定理
~多层感知器

~神经网络每一层的作用

~BP算法

~自编码器(图像降噪,数据降维)


2.1 图像处理基本练习
这部分内容包括:理解图像类型,进行一些基本的图像分割操作。
(1)下载并显示图像
~下载图像
~显示图像的基本信息
~显示图像

![]()

(2)读取并改变图像像素值
~将第30行到第100行,第10列到第100列之间像素值置为0(黑)
~将前10行像素值置为0
~将像素值小于80的像素置为255(白)


~读取猫的rgb图片,所有r维度高于160的像素值部分全部置为255
~将rgb的三层像素值颠倒,得到bgr图像



(3) 转换图像数据类型


(4)直方图hist
将二维矩阵img减少一个维度,img.ravel()使得原二维灰度图像成为一维灰度值序列

(5)图像分割
先将rgb图像转化为灰度图像,显示直方图,再根据直方图用阈值法(显示像素值除以256大于0.5的像素)对图像进行分割

(6)Canny算子 进行边缘检测
img_edges = canny(img):
sigma:高斯滤波器的标准差
low_threshold:小于该阈值的像素直接置为0
high_threshold:大于该阈值的像素直接置为255

(7)调整图像的对比度
~载入图像,调整尺度


~低对比度图像、对比度拉伸、直方图均衡化、自适应直方图均衡化之间对比(图像、直方图)

2.2 pytorch 基础练习
1)主要介绍了一些常见运算,其中点积运算中有一处错误

错误显示m和v的数据类型不同,无法运算,百度后得知:
“torch.tensor()仅仅是Python的函数;torch.Tensor(),Python类,是默认张量类型torch.FloatTensor()的别名,单精度浮点数类型;”
将【10】单元格中的 修改为torch.tensor()即可:
修改为torch.tensor()即可:
2)
torch.
linspace(
start,
end,
steps=100,
out=None,
dtype=None,
layout=torch.strided,
device=None,
requires_grad=False) → Tensor
返回一个一维的tensor(张量),这个张量包含了从start到end,分成steps个线段得到的向量。常用的几个变量:
start:开始值
end:结束值
steps:分割的点数,默认是100
dtype:返回值(张量)的数据类型

~加大数据量,分布呈正态分布

2.3 螺旋数据分类
1)3000个样本进行初始化

2)通过构建线性分类器进行分类后,我们得到这样的结果:

可以看到,虽然大体将数据分为了三类,但是终归是线性分类,样本为螺旋数据,效果并不理想,无法实现准确分类。
3) 构建两层神经网络分类,得到如下结果:
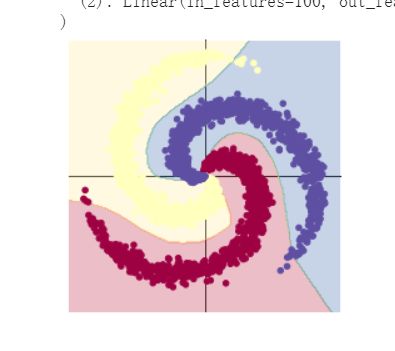
激活函数为ReLU函数的两层神经网络使得该神经网络可以实现非线性分类,准确度得到提升。
2.4 回归分析
1)待求解的回归问题,寻找一个匹配的函数

2)两层神经网络(无激活函数)

3)激活函数为ReLU和Tanh ,得到结果:
Tanh函数所得结果较ReLU更为平滑
