Linux:浅析线程(POSIX信号量与读写锁)
说到信号量,我们立即反应上来,System V版本当中的信号量。信号量的本质相当于一个计数器,是描述保护临界资源中资源的数目。其目的是保护临界资源。但是System V版本的信号量是应用于进程间的。而POSIX信号量是可以用于线程间的。
POSIX信号量函数
#include 我们在上篇博客的生产者消费者模型中,其中生产者慢,消费者快,如果不加条件变量,那么消费者会长期占有互斥锁,从而导致死锁问题。而现在,如果消费者慢,生产者快,那么生产者就会生成大量的数据,导致消费者无法取出数据。从而造成不可估量的影响。倘若我们现在的环境是在一个环形队列当中。这个时候,如果生产者生产速度过快,则会导致消费者的取数据的速度跟不上生产速度,那么就会导致数据被覆盖。
#include 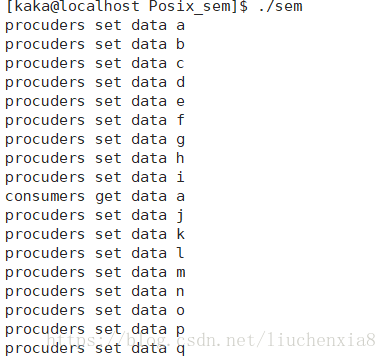
而这时候引入POSIX信号量就会避免这个问题,它能够让我们生产者与消费者同步起来。
#include 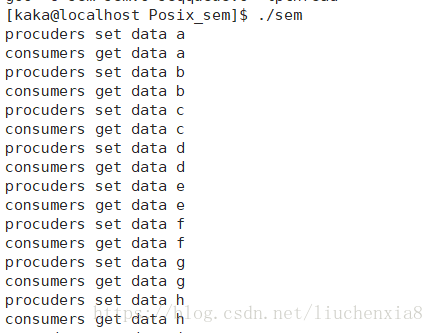
现在我们发现,在添加了信号量以后,我们消费者与生产者尽管生产者速度很快,但是消费者仍然与生产者保持同步。
读写锁
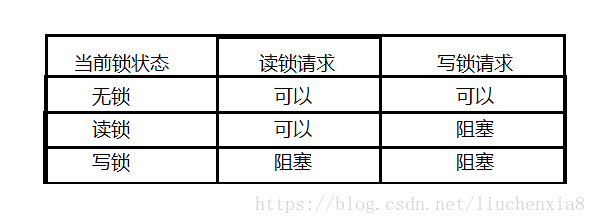
我们在编程的时候,某一些公共数据修改的机会很少。相比较修改,读的机会反倒很多。通常而言,读这个过程常常伴随着查找的操作,查找是一个耗时非常久的动作。如果给读的代码加锁,有可能就会出现死锁问题,由于读的时候太长了,导致无法写入。所以处理这种情况,我们就会加入一个新的方法,就是读写锁!
读写锁本质上是一种自旋锁。(所谓自旋锁,就是在等待的时候并不是阻塞等待,而是可以允许去做一些别的事情)
读写锁接口
#include 欢迎大家共同讨论,如有错误及时联系作者指出,并改正。谢谢大家!