图像的二值化之python+opencv
感谢原作者:what_lei
原帖地址:http://blog.csdn.net/what_lei/article/details/49159655
定义:图像的二值化,就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有黑和白的视觉效果。
一幅图像包括目标物体、背景还有噪声,要想从多值的数字图像中直接提取出目标物体,常用的方法就是设定一个阈值T,用T将图像的数据分成两部分:大于T的像素群和小于T的像素群。这是研究灰度变换的最特殊的方法,称为图像的二值化(Binarization)。
简单的阈值-(全局阈值):
Python-OpenCV中提供了阈值(threshold)函数:
cv2.threshold()
函数:第一个参数 src 指原图像,原图像应该是灰度图。
第二个参数 x 指用来对像素值进行分类的阈值。
第三个参数 y 指当像素值高于(有时是小于)阈值时应该被赋予的新的像素值
第四个参数 Methods 指,不同的不同的阈值方法,这些方法包括:
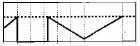
•cv2.THRESH_BINARY 图(1)
•cv2.THRESH_BINARY_INV 图(2)
•cv2.THRESH_TRUNC 图(3)
•cv2.THRESH_TOZERO 图(4)
•cv2.THRESH_TOZERO_INV 图(5)
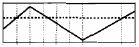
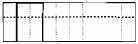
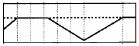
破折线为将被阈值化的值;虚线为阈值
图(1)
大于阈值的像素点的灰度值设定为最大值(如8位灰度值最大为255),灰度值小于阈值的像素点的灰度值设定为0。
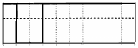
大于阈值的像素点的灰度值设定为0,而小于该阈值的设定为255。
图(3)
像素点的灰度值小于阈值不改变,大于阈值的灰度值的像素点就设定为该阈值。
图(4)
像素点的灰度值小于该阈值的不进行任何改变,而大于该阈值的部分,其灰度值全部变为0。

图(5)
像素点的灰度值大于该阈值的不进行任何改变,像素点的灰度值小于该阈值的,其灰度值全部变为0。
Python+opencv代码:
- import cv2
- import numpy as np
- from matplotlib import pyplot as plt
- img=cv2.imread('1.bmp')
- GrayImage=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
- ret,thresh1=cv2.threshold(GrayImage,127,255,cv2.THRESH_BINARY)
- ret,thresh2=cv2.threshold(GrayImage,127,255,cv2.THRESH_BINARY_INV)
- ret,thresh3=cv2.threshold(GrayImage,127,255,cv2.THRESH_TRUNC)
- ret,thresh4=cv2.threshold(GrayImage,127,255,cv2.THRESH_TOZERO)
- ret,thresh5=cv2.threshold(GrayImage,127,255,cv2.THRESH_TOZERO_INV)
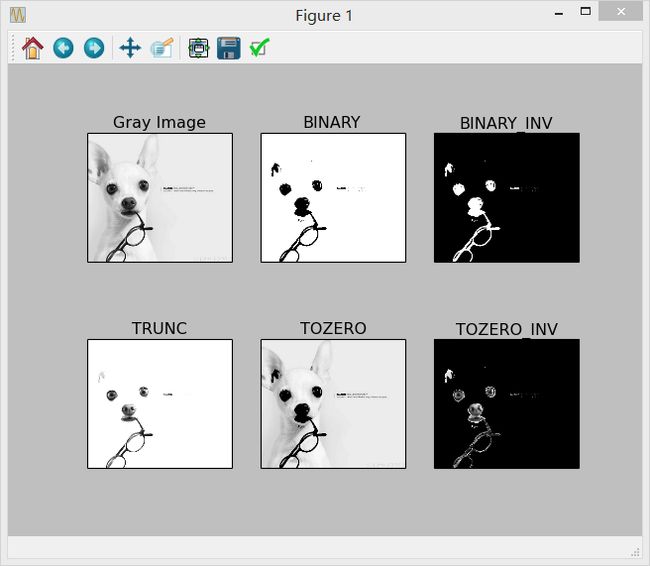
- titles = ['Gray Image','BINARY','BINARY_INV','TRUNC','TOZERO','TOZERO_INV']
- images = [GrayImage, thresh1, thresh2, thresh3, thresh4, thresh5]
- for i in xrange(6):
- plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')
- plt.title(titles[i])
- plt.xticks([]),plt.yticks([])
- plt.show()
自适应阈值:
当同一幅图像上的不同部分的具有不同亮度时。这种情况下我们需要采用自适应阈值。此时的阈值是根据图像上的每一个小区域计算与其对应的阈值。因此在同一幅图像上的不同区域采用的是不同的阈值,从而使我们能在亮度不同的情况下得到更好的结果。
cv2.adaptiveThreshold()
函数:第一个参数 src 指原图像,原图像应该是灰度图。
第二个参数 x 指当像素值高于(有时是小于)阈值时应该被赋予的新的像素值
第三个参数 adaptive_method 指: CV_ADAPTIVE_THRESH_MEAN_C 或 CV_ADAPTIVE_THRESH_GAUSSIAN_C
第四个参数 threshold_type 指取阈值类型:必须是下者之一 • CV_THRESH_BINARY,
• CV_THRESH_BINARY_INV
第五个参数 block_size 指用来计算阈值的象素邻域大小: 3, 5, 7, ...
第六个参数 param1 指与方法有关的参数。对方法CV_ADAPTIVE_THRESH_MEAN_C 和 CV_ADAPTIVE_THRESH_GAUSSIAN_C, 它是一个从均值或加权均值提取的常数, 尽管它可以是负数。
自适应阈值: 对方法CV_ADAPTIVE_THRESH_MEAN_C,先求出块中的均值,再减掉param1。
对方法 CV_ADAPTIVE_THRESH_GAUSSIAN_C ,先求出块中的加权和(gaussian), 再减掉param1。
例如:
采用方法 CV_ADAPTIVE_THRESH_MEAN_C,阈值类型:CV_THRESH_BINARY, 阈值的象素邻域大小 block_size 选取3,参数param1 取3和5时:




部分原图像像素值 当参数param1为7时
选取对应领域(3*3)求其均值,然后减去参数param1的值为自适应阈值。测试时求得均值为小数时,貌似进行四舍五入之后再减去参数param1。(可能是我没测试准确,无聊时测试一下,共同学习)
python+opencv代码:
- import cv2
- import numpy as np
- from matplotlib import pyplot as plt
- img = cv2.imread('1.bmp')
- GrayImage=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
- # 中值滤波
- GrayImage= cv2.medianBlur(GrayImage,5)
- ret,th1 = cv2.threshold(GrayImage,127,255,cv2.THRESH_BINARY)
- #3 为Block size, 5为param1值
- th2 = cv2.adaptiveThreshold(GrayImage,255,cv2.ADAPTIVE_THRESH_MEAN_C,\
- cv2.THRESH_BINARY,3,5)
- th3 = cv2.adaptiveThreshold(GrayImage,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
- cv2.THRESH_BINARY,3,5)
- titles = ['Gray Image', 'Global Thresholding (v = 127)',
- 'Adaptive Mean Thresholding', 'Adaptive Gaussian Thresholding']
- images = [GrayImage, th1, th2, th3]
- for i in xrange(4):
- plt.subplot(2,2,i+1),plt.imshow(images[i],'gray')
- plt.title(titles[i])
- plt.xticks([]),plt.yticks([])
- plt.show()
