脸型匹配
方法1,基于曲率,计算曲率组成的特征向量的余弦距离
def cos_sim(vector_a, vector_b):
"""
计算两个向量之间的余弦相似度
:param vector_a: 向量 a
:param vector_b: 向量 b
:return: sim
"""
vector_a = np.mat(vector_a)
vector_b = np.mat(vector_b)
num = float(vector_a * vector_b.T)
denom = np.linalg.norm(vector_a) * np.linalg.norm(vector_b)
cos = num / denom
sim = 0.5 + 0.5 * cos
return sim
def compute_curvature_cov(input_numpy):
#曲率越大,越弯曲
# |y''|
#k= -----------
# 3/2
# (1+y'2)
#y’(i) = (y(i+1)-y(i))/h
#y’’(i) = (y(i+1)+y(i-1)-2*y(i))/h^2
input_numpy_yijie = (input_numpy[1:,1]-input_numpy[:-1,1])/(input_numpy[1:,0]-input_numpy[:-1,0])
input_numpy_yijie = input_numpy_yijie[:-1]
input_numpy_erjie = (input_numpy[2:,1]+input_numpy[:-2,1]-2*input_numpy[1:-1,1])/((input_numpy[2:,0]-input_numpy[:-2,0])*(input_numpy[2:,0]-input_numpy[:-2,0]))
K = np.abs(input_numpy_erjie) /np.power((np.ones_like(input_numpy_yijie)+input_numpy_yijie*input_numpy_yijie),3.0/2.0)
return K
方法2,基于人脸关键点坐标的L1距离,

方法3,基于对比的两个人脸的关键点组成区域的交集占整个图片的面积,
def area_sim(keypoints_Xs, keypoints_Xt):
keypoints_Xt = keypoints_Xt.reshape(-1,2)
process_num = 17
keypoints_Xs = keypoints_Xs[:process_num]
keypoints_Xt = keypoints_Xt[:process_num]
scale = 256
mask = np.zeros((scale,scale),np.uint8)
for i in range(process_num-1):
triangle = np.array([[[keypoints_Xs[i,0],keypoints_Xs[i,1]], [keypoints_Xs[i+1,0],keypoints_Xs[i+1,1]], [keypoints_Xt[i,0],keypoints_Xt[i,1]]]], dtype = np.int32)
cv2.fillPoly(mask, triangle, 1)
triangle = np.array([[[keypoints_Xs[i,0],keypoints_Xs[i,1]], [keypoints_Xs[i+1,0],keypoints_Xs[i+1,1]], [keypoints_Xt[i+1,0],keypoints_Xt[i+1,1]]]], dtype = np.int32)
cv2.fillPoly(mask, triangle, 1)
triangle = np.array([[[keypoints_Xt[i,0],keypoints_Xt[i,1]], [keypoints_Xt[i+1,0],keypoints_Xt[i+1,1]], [keypoints_Xs[i,0],keypoints_Xs[i,1]] ]], dtype = np.int32)
cv2.fillPoly(mask, triangle, 1)
triangle = np.array([[[keypoints_Xt[i,0],keypoints_Xt[i,1]], [keypoints_Xt[i+1,0],keypoints_Xt[i+1,1]], [keypoints_Xs[i+1,0],keypoints_Xs[i+1,1]] ]], dtype = np.int32)
cv2.fillPoly(mask, triangle, 1)
dis = 1- np.sum(mask)/(scale*scale)
return dis,mask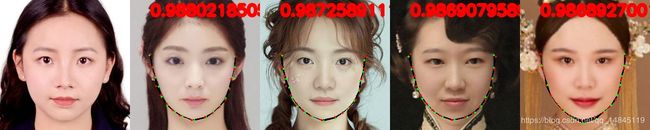
方法4,对上面的3种方法进行融合,
def total_method(keypoints_Xs, keypoints_Xt):
#(68, 2) (54,)
#一共68个关键点,取前17个人脸边缘轮廓点使用
keypoints_Xt = keypoints_Xt.reshape(-1,2)
process_num = 17
#method 1,曲率
qulv_Xs = compute_curvature_cov(keypoints_Xs[:process_num])
qulv_Xt = compute_curvature_cov(keypoints_Xt[:process_num])
weights_matrix = np.ones_like(qulv_Xt, np.float32)
#weights_matrix[3:12] =2.0
dis1 = cos_sim(qulv_Xs*weights_matrix , qulv_Xt*weights_matrix)
#method 2,坐标L1
scale =256
keypoints_Xs = keypoints_Xs/scale
keypoints_Xt = keypoints_Xt/scale
dis2 = 1 - np.mean(np.abs(keypoints_Xs[:process_num] - keypoints_Xt[:process_num]))#cos_sim(keypoints_Xs[:process_num].reshape(-1,1).squeeze(), keypoints_Xt[:process_num].reshape(-1,1).squeeze())
#method 3,面积
dis3 ,mask= area_sim(keypoints_Xs*scale, keypoints_Xt*scale )
dis = 0.1*dis1+ 0.1*dis2 +0.8*dis3
return dis
调用,
def compare(points_Xs, face_npy):
#输入:68个关键点numpy,68个人脸数据库,注意所有人脸都需要首先进行对齐操作,然后归一化到256*256
#输出:最相似人脸轮廓的索引,人脸轮廓的相似度值,人脸轮廓的差异mask list
indexs = None
dis_ls = list()
mask_list = []
for j in range(len(face_npy)): # len(face_npy)
distz, mask = total_method(points_Xs, face_npy[j])
dis_ls.append(distz)
mask_list.append(mask)
dis_ls_arr = np.array(dis_ls)
print(dis_ls)
euc_indexs = np.argsort(-1*dis_ls_arr)
return euc_indexs, dis_ls ,mask_list
效果,
融合>面积>L1距离>曲率