UR-ROS
UR-ROS
- 1 修改镜像源
- 2 步骤
- 2.1 设置sources.list
- 2.2 设置key
- 2.3 修改下载源后更新package
- 2.4 安装ROS kinetic完整版
- 2.4.1 如果Ubuntu 16.04 安装ROS kinetic提示Depends: ros-kinetic-desktop but it is not going to be installed
- 2.5 初始化rosdep
- 2.6 配置ROS环境
- 2.7 安装依赖项
- 2.8 测试ROS是否安装成功
- 2.9 卸载Kinetic
- 2.10 catkin方式创建ROS工作空间
- 2.11 然后upgrade
- 3 安装Arm
- 3.1 安装MoveIt完整版本
- 3.2 UR Arm
- 注意事项
- 参考
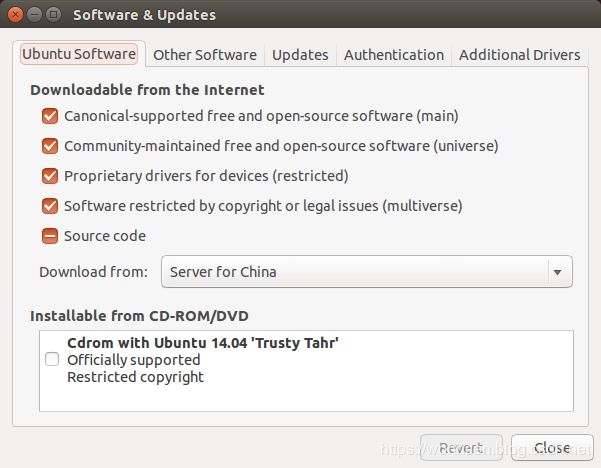
1 修改镜像源
- 修改为清华的镜像源–清华大学ubuntu镜像使用帮助
cp /etc/apt/sources.list /etc/apt/sources.list.bak 做备份 - 配置Ubuntu仓库,”restricted,” “universe,” and “multiverse.” 选择来自中国的服务器。
- sudo apt-get update
2 步骤
2.1 设置sources.list
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
server for chaina 改为 china中的 ustc的
2.2 设置key
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
2.3 修改下载源后更新package
sudo apt-get update
2.4 安装ROS kinetic完整版
ROS kinetic 也有很多版本,比如工业版,基础版,高级版,全功能版,完整版如下:
sudo apt-get install ros-kinetic-desktop-full
如果提示出错(可能python、Qt环境没有),使用aptitude查看依赖
sudo apt-get install aptitude
sudo aptitude install ros-kinetic-desktop-full
2.4.1 如果Ubuntu 16.04 安装ROS kinetic提示Depends: ros-kinetic-desktop but it is not going to be installed
- 把Ubuntu源设置成了中科大源
- 删除ros-latest.list
rm -rf /etc/apt/sources.list.d/ros-latest.list
- 修改源
vi /etc/apt/sources.list
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-proposed main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-proposed main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
- 接下来从第一步——设置安装源那里开始,从头安装即可。
2.5 初始化rosdep
注意:在使用ROS之前需要初始化rosdep
sudo rosdep init
rosdep update
2.6 配置ROS环境
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
locate source ~/.bashrc
2.7 安装依赖项
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
2.8 测试ROS是否安装成功
roscore
Ubuntu16.04安装ROS Kinetic详细过程
2.9 卸载Kinetic
- 用apt-get方式安装Kinetic的,卸载使用如下命令:
sudo apt-get remove ros-kinetic-*
卸载成功的效果:就是/opt下的ROS文件夹Kinetic被删除
2.10 catkin方式创建ROS工作空间
这些操作方法只适用于ROS Groovy及后期版本,对于ROS Fuerte及早期版本请选择rosbuild。
- 创建一个catkin 工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
- 这个工作空间是空的(在’src’目录中没有任何软件包,只有一个CMakeLists.txt链接文件),可以编译它
cd ~/catkin_ws/
catkin_make
- catkin_make命令在catkin 工作空间中是一个非常方便的工具。如果你查看一下当前目录应该能看到’build’和’devel’这两个文件夹。在’devel’文件夹里面你可以看到几个setup.sh文件。source这些文件中的任何一个都可以将当前工作空间设置在ROS工作环境的最顶层,想了解更多请参考catkin文档。接下来首先source一下新生成的setup.sh文件
source devel/setup.bash
- 要想保证工作空间已配置正确需确保ROS_PACKAGE_PATH环境变量包含你的工作空间目录,采用以下命令查看
echo $ROS_PACKAGE_PATH
结果 /home/youruser/catkin_ws/src:/opt/ros/kinetic/share:/opt/ros/kinetic/stacks
2.11 然后upgrade
sudo apt-get upgrade
3 安装Arm
3.1 安装MoveIt完整版本
sudo apt-get install ros-kinetic-moveit
3.2 UR Arm
参考如图

- ROS中集成了Universal Robots机器人的功能包,使用如下命令即可安装,其中包含UR3、UR5、UR10三款机器人的相关功能:
sudo apt-get install ros-kinetic-universal-robot
cd ~/catkin_ws/src
# retrieve the sources (replace '$DISTRO' with the ROS version you are using)
git clone -b $DISTRO-devel https://github.com/ros-industrial/universal_robot.git
cd ~/catkin_ws
# checking dependencies (replace '$DISTRO' with the ROS version you are using)
rosdep update // if already done, skip this step
rosdep install --from-paths src --ignore-src --rosdistro kinetic
# building
catkin_make
# source this workspace (careful when also sourcing others)
source ~/catkin_ws/devel/setup.bash
- Universal Robots的相关功能包

- 使用以下命令启动UR5机器人的gazebo仿真环境:
roslaunch ur_gazebo ur5.launch
注意事项
- 装完ros后,要upgrade,不然会出现the system is running in low-graphics mode,具体原因不清楚,待分析,路过的知道的,请告知,谢谢!
- 创建程序包时遇到的rosdep update出错
rm /etc/ros/rosdep/sources.list.d/20-default.list
sudo rosdep init
rosdep update
参考
1、ROS探索总结(五十)——ROS机器人实例 (Universal Robots)
2、Apriltags+Ros+Ur5项目–moveit
3、Ubuntu install of ROS Kinetic
4、ROS的安装 ubuntu14.04(indigo),ubuntu16.04(kinetic)以及shell脚本一键安装
5、ubuntu16.04环境下安装ROS Kinetic–替换为清华的软件源
6、清华大学ubuntu镜像使用帮助
7、Ubuntu16.04安装ROS Kinetic详细过程
8、ROS 不能再详细的安装教程
9、Ubuntu 16.04 安装ROS kinetic提示Depends: ros-kinetic-desktop but it is not going to be installed