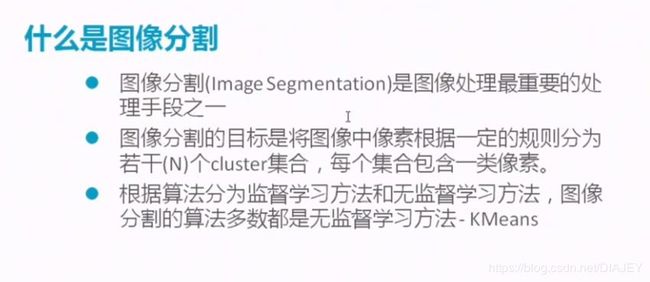
openCV学习笔记(十三)-- 图像分割

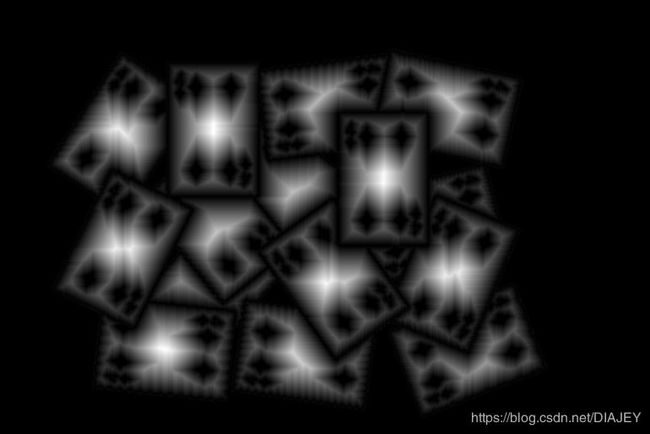
距离变换:
distanceTransform方法用于计算图像中每一个非零点距离离自己最近的零点的距离,distanceTransform的第二个Mat矩阵参数dst保存了每一个点与最近的零点的距离信息,图像上越亮的点,代表了离零点的距离越远。
https://blog.csdn.net/u012566751/article/details/54286391

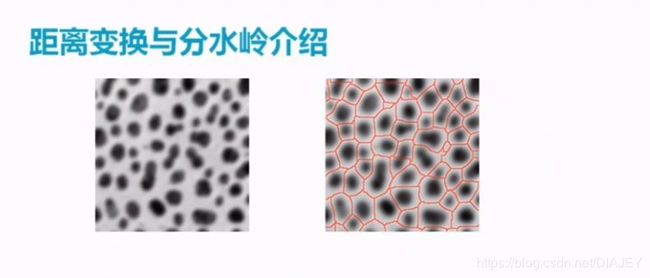
分水岭算法:
分水岭算法是一种图像区域分割法,在分割的过程中,它会把跟临近像素间的相似性作为重要的参考依据,从而将在空间位置上相近并且灰度值相近的像素点互相连接起来构成一个封闭的轮廓,封闭性是分水岭算法的一个重要特征。
https://blog.csdn.net/xiachong27/article/details/80410384

两种算法对应API:

·图像分割相关操作流程

代码实现:
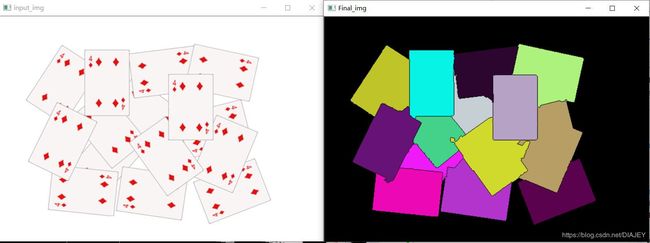
#include效果图: