姿态估计1-09:HR-Net(人体姿态估算)-源码无死角解析(5)-HighResolutionModule
以下链接是个人关于HR-Net(人体姿态估算) 所有见解,如有错误欢迎大家指出,我会第一时间纠正。有兴趣的朋友可以加微信:a944284742相互讨论技术。若是帮助到了你什么,一定要记得点赞!因为这是对我最大的鼓励。
姿态估计1-00:HR-Net(人体姿态估算)-目录-史上最新无死角讲解
前言
通过上篇博客,对于 HR-Net 的总体架构可谓是是否了解了,但是呢,对于lib/models/pose_hrnet.py中的类HighResolutionModule,也就是论文中平行子网络信息交换模块,该模块也是论文中比较核心的一个模块,接下来我们就来看看其具体实现过程。
代码注释
后续有领读,大家粗略看以下代码注释即可
class HighResolutionModule(nn.Module):
def __init__(self, num_branches, blocks, num_blocks, num_inchannels,
num_channels, fuse_method, multi_scale_output=True):
"""
:param num_branches: 当前 stage 分支平行子网络的数目
:param blocks: BasicBlock或者BasicBlock
:param num_blocks: BasicBlock或者BasicBlock的数目
:param num_inchannels: 输入通道数
当stage = 2时: num_inchannels = [32, 64]
当stage = 3时: num_inchannels = [32, 64, 128]
当stage = 4时: num_inchannels = [32, 64, 128, 256]
:param num_channels: 输出通道数目
当stage = 2时: num_inchannels = [32, 64]
当stage = 3时: num_inchannels = [32, 64, 128]
当stage = 4时: num_inchannels = [32, 64, 128, 256]
:param fuse_method: 默认SUM
:param multi_scale_output:
当stage = 2时: multi_scale_output=Ture
当stage = 3时: multi_scale_output=Ture
当stage = 4时: multi_scale_output=False
"""
super(HighResolutionModule, self).__init__()
# 对输入的一些参数进行检测
self._check_branches(
num_branches, blocks, num_blocks, num_inchannels, num_channels)
# 上面有详细介绍
self.num_inchannels = num_inchannels
self.fuse_method = fuse_method
self.num_branches = num_branches
self.multi_scale_output = multi_scale_output
# 为每个分支构建分支网络
# 当stage=2,3,4时,num_branches分别为:2,3,4,表示每个stage平行网络的数目
# 当stage=2,3,4时,num_blocks分别为:[4,4], [4,4,4], [4,4,4,4],
self.branches = self._make_branches(
num_branches, blocks, num_blocks, num_channels)
# 创建一个多尺度融合层,当stage=2,3,4时
# len(self.fuse_layers)分别为2,3,4. 其与num_branches在每个stage的数目是一致的
self.fuse_layers = self._make_fuse_layers()
a = len(self.fuse_layers)
self.relu = nn.ReLU(True)
def _check_branches(self, num_branches, blocks, num_blocks,
num_inchannels, num_channels):
if num_branches != len(num_blocks):
error_msg = 'NUM_BRANCHES({}) <> NUM_BLOCKS({})'.format(
num_branches, len(num_blocks))
logger.error(error_msg)
raise ValueError(error_msg)
if num_branches != len(num_channels):
error_msg = 'NUM_BRANCHES({}) <> NUM_CHANNELS({})'.format(
num_branches, len(num_channels))
logger.error(error_msg)
raise ValueError(error_msg)
if num_branches != len(num_inchannels):
error_msg = 'NUM_BRANCHES({}) <> NUM_INCHANNELS({})'.format(
num_branches, len(num_inchannels))
logger.error(error_msg)
raise ValueError(error_msg)
def _make_one_branch(self, branch_index, block, num_blocks, num_channels,
stride=1):
downsample = None
# 如果stride不为1, 或者输入通道数目与输出通道数目不一致
# 则通过卷积,对其通道数进行改变
if stride != 1 or \
self.num_inchannels[branch_index] != num_channels[branch_index] * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(
self.num_inchannels[branch_index],
num_channels[branch_index] * block.expansion,
kernel_size=1, stride=stride, bias=False
),
nn.BatchNorm2d(
num_channels[branch_index] * block.expansion,
momentum=BN_MOMENTUM
),
)
layers = []
# 为当前分支branch_index创建一个block,该处进行下采样
layers.append(
block(
self.num_inchannels[branch_index],
num_channels[branch_index],
stride,
downsample
)
)
# 把输出通道数,赋值给输入通道数,为下一stage作准备
self.num_inchannels[branch_index] = \
num_channels[branch_index] * block.expansion
# 为[1, num_blocks[branch_index]]分支创建block
for i in range(1, num_blocks[branch_index]):
layers.append(
block(
self.num_inchannels[branch_index],
num_channels[branch_index]
)
)
return nn.Sequential(*layers)
def _make_branches(self, num_branches, block, num_blocks, num_channels):
branches = []
# 循环为每个分支构建网络
# 当stage=2,3,4时,num_branches分别为:2,3,4,表示每个stage平行网络的数目
# 当stage=2,3,4时,num_blocks分别为:[4,4], [4,4,4], [4,4,4,4],
for i in range(num_branches):
branches.append(
self._make_one_branch(i, block, num_blocks, num_channels)
)
return nn.ModuleList(branches)
def _make_fuse_layers(self):
if self.num_branches == 1:
return None
# 平行子网络(分支)数目
num_branches = self.num_branches
# 输入通道数
num_inchannels = self.num_inchannels
fuse_layers = []
# 为每个分支都创建对应的特征融合网络,如果multi_scale_output==1,则只需要一个特征融合网络
for i in range(num_branches if self.multi_scale_output else 1):
fuse_layer = []
for j in range(num_branches):
# 每个分支网络的输出有多中情况
# 1.当前分支信息传递到上一分支(沿论文图示scale方向)的下一层(沿论文图示depth方向),进行上采样,分辨率加倍
if j > i:
fuse_layer.append(
nn.Sequential(
nn.Conv2d(
num_inchannels[j],
num_inchannels[i],
1, 1, 0, bias=False
),
nn.BatchNorm2d(num_inchannels[i]),
nn.Upsample(scale_factor=2**(j-i), mode='nearest')
)
)
# 2.当前分支信息传递到当前分支(论文图示沿scale方向)的下一层(沿论文图示depth方向),不做任何操作,分辨率相同
elif j == i:
fuse_layer.append(None)
# 3.当前分支信息传递到下前分支(论文图示沿scale方向)的下一层(沿论文图示depth方向),分辨率减半,分辨率减半
else:
conv3x3s = []
for k in range(i-j):
if k == i - j - 1:
num_outchannels_conv3x3 = num_inchannels[i]
conv3x3s.append(
nn.Sequential(
nn.Conv2d(
num_inchannels[j],
num_outchannels_conv3x3,
3, 2, 1, bias=False
),
nn.BatchNorm2d(num_outchannels_conv3x3)
)
)
else:
num_outchannels_conv3x3 = num_inchannels[j]
conv3x3s.append(
nn.Sequential(
nn.Conv2d(
num_inchannels[j],
num_outchannels_conv3x3,
3, 2, 1, bias=False
),
nn.BatchNorm2d(num_outchannels_conv3x3),
nn.ReLU(True)
)
)
fuse_layer.append(nn.Sequential(*conv3x3s))
fuse_layers.append(nn.ModuleList(fuse_layer))
return nn.ModuleList(fuse_layers)
def get_num_inchannels(self):
return self.num_inchannels
def forward(self, x):
# 当stage=2,3,4时,num_branches分别为:2,3,4,表示每个stage平行网络的数目
if self.num_branches == 1:
return [self.branches[0](x[0])]
# 当前有多少个网络分支,则有多少个x当作输入
# 当stage=2:x=[b,32,64,48],[b,64,32,24]
# -->x=[b,32,64,48],[b,64,32,24]
# 当stage=3:x=[b,32,64,48],[b,64,32,24],[b,128,16,12]
# -->x=[b,32,64,48],[b,64,32,24],[b,128,16,12]
# 当stage=4:x=[b,32,64,48],[b,64,32,24],[b,128,16,12],[b,256,8,6]
# -->[b,32,64,48],[b,64,32,24],[b,128,16,12],[b,256,8,6]
# 简单的说,该处就是对每个分支进行了BasicBlock或者Bottleneck操作
for i in range(self.num_branches):
x[i] = self.branches[i](x[i])
x_fuse = []
# 对每个分支进行融合(信息交流)
for i in range(len(self.fuse_layers)):
# 循环融合多个分支的输出信息,当作输入,进行下一轮融合
y = x[0] if i == 0 else self.fuse_layers[i][0](x[0])
for j in range(1, self.num_branches):
if i == j:
y = y + x[j]
else:
y = y + self.fuse_layers[i][j](x[j])
x_fuse.append(self.relu(y))
return x_fuse
代码领读
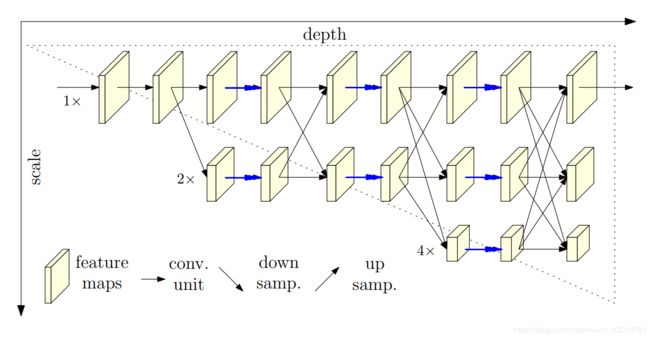
首先我们看到前线传播的如下部分:
for i in range(self.num_branches):
x[i] = self.branches[i](x[i])
其对应论文中的如下操作(蓝色箭头):
在找到如下代码部分:
x_fuse = []
# 对每个分支进行融合(信息交流)
for i in range(len(self.fuse_layers)):
# 循环融合多个分支的输出信息,当作输入,进行下一轮融合
y = x[0] if i == 0 else self.fuse_layers[i][0](x[0])
for j in range(1, self.num_branches):
if i == j:
y = y + x[j]
else:
y = y + self.fuse_layers[i][j](x[j])
x_fuse.append(self.relu(y))
其对应论文如下图示部分(红色箭头):
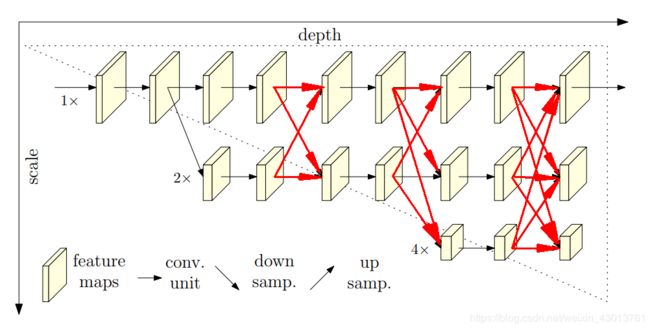
大家可以根据该图示,去仔细分析代码。到这里为止,对于HR-Net源码的分析算是完成了。谢谢大家的关注