quat的坐标系转换
oculus获取的pose数据包含坐标和四元数信息,但所处的坐标系和CryEngine坐标系不同
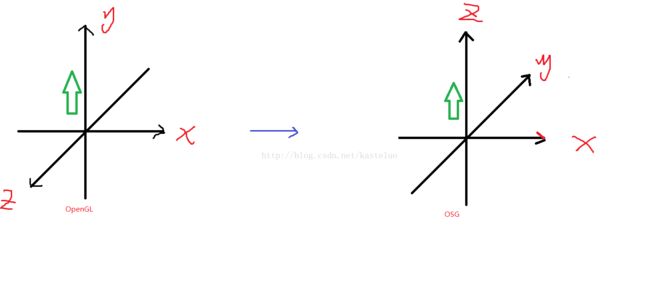
oculus坐标系 :+x向右,+y向上,+z向外(屏幕外)
cryengine坐标系:+x向右,+y向内(屏幕以内),+z向上
所以需要使用Oculus时,获取的相机位置和四元数都需要进行转换。
坐标转换比较好理解:将z轴和y轴对调再取反即可
Vec3 Device::HmdVec3ToWorldVec3(const Vec3 &vec)
{
// 将oculus的y替换到CryEngine的z,将oculus的z取反,替换CryEngine的y
return Vec3(vec.x, -vec.z, vec.y);
}
// 以下代码来自CryEnginev5
// -------------------------------------------------------------------------
// 四元数转换,需要考虑两方面:
其一,数值和变换的坐标轴对应;
其二,变换的坐标轴正确。
比较费解的就是为什么要旋转坐标系,个人理解为:
第一步将数值对调,只保证了各个分量所在的x、y、z轴的分量值正确,但oculus和CryEngine原来各自坐标系统下的轴不一致,
经过第一步操作后,作用到模型上后,只是将模型旋转的角度正确了,但默认的相机朝向却不同,需要将oculus的相机朝向和
CryEngine的相机朝向统一为相同方向。
Quat Device::HmdQuatToWorldQuat(const Quat &quat)
{
Matrix33 m33(quat);
Vec3 column1 = -quat.GetColumn2(); // 取出四元数的z变换分量,
m33.SetColumn2(m33.GetColumn1()); // 取出四元数的y变换分量,作为CryEngine的z分量
m33.SetColumn1(column1);// 将oculus取反后的z分量,作为CryEngine的y分量
return Quat::CreateRotationX(gf_PI * 0.5f) * Quat(m33); // 将坐标系从oculus坐标系变换到CryEngine坐标系,以便使其相机朝向一致。
}
=====================================================================================================
后补一:
最近又在处理坐标系变换的问题,发现,其实,以上的解说让你很难理解,用解析几何的知识解释就很容易明白:
OpenGL定义坐标系的绕x旋转矩阵:
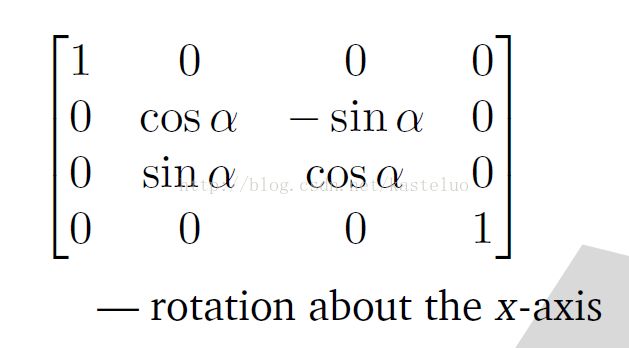
以上所要解决的问题就是 将坐标系绕x轴向下旋转90度,便得到目标坐标系。

基于以上理论,但要在具体中应用,需要注意:
该矩阵作用的对象应该是 原来的平移和旋转分量,不能通过矩阵相乘来处理,
1、对于平移的变换需要如下操作:
1.1、设 平移 为T(x,y,z,w),T'为变换后的平移 ,R为绕x轴向前下放旋转90度的矩阵,
T’ = R*T
1.2、对于原来的旋转,如果使用四元数计算,则需要将旋转矩阵作用到旋转轴上,变换旋转轴,
设原来的旋转轴为 A
A’ = R* A
用新的旋转角和旋转轴构造新的四元数。
2、最后将旋转和平移相乘,获得最终的变换矩阵。
举例,以下为osg下的一个转换示例:
// 旋转角度
osg::Matrix rotate = osg::Matrix::rotate(osg::DegreesToRadians(-90.0),osg::Vec3(1,0,0));
osg::Matrix oldMat = _mat; //
osg::Vec3 oldTrans = oldMat.getTrans(); // 获取平移分量
osg::Quat oldQuat = oldMat.getRotate(); // 获取旋转分量
osg::Vec3 newTrans = rotate * oldTrans; // 计算新的平移
osg::Matrix newTransMat = osg::Matrix::translate(newTrans);
// 计算新的旋转
osg::Vec3 axis;
double angle;
oldQuat.getRotate(angle,axis);
osg::Vec3 newAxis = rotate * axis;
osg::Quat newQuat(angle,newAxis);
// 设置给节点
transformNode->setMatrix(osg::Matrix::rotate(newQuat) * newMat );===================================================================================================================================
后补二:
上面的理解总是有些牵强,有经过几番研究,这下才信服:
1、物体从OpenGL坐标系,变换到OSG坐标系,原来的旋转矩阵,不能直接使用。
2、物体从3dmax建模,导出到OpenGL渲染系统下是y轴向上,导出到OSG渲染系统下是z轴向上,就相当模型已经被绕x轴正向旋转了90度。
3、模型在OSG坐标系中被加载,原来在OpenGL坐标系下对模型的旋转矩阵,在该系统下就需要进行如下处理:
3.1 乘以一个绕x轴负向90度的旋转矩阵(将模型从z向上,变成y向上);
3.2 乘以模型在OpenGL坐标系下的旋转矩阵R;
3.3 经过上面两次旋转,模型相当于在OpenGL坐标系下进行了旋转,要让它在OSG下显示正确,需要将OpenGL和OSG坐标系对其, 其实,将OpenGL坐标系
绕x轴负向旋转90度就得到了OSG坐标系,所以此时,需要再次乘以一个绕x轴负向90度的旋转矩阵
3.4 最终的旋转矩阵为: M = q*R*q-1
3.5 用代码表示:
osg::Quat rNeg90(osg::DegreesToRadians(-90.0),osg::Vec3(1,0,0));
osg::Quat rPos90(osg::DegreesToRadians(90.0),osg::Vec3(1,0,0));
return rNeg90 * quat * rPos90;
//或
return rNeg90 * quat * rNeg90.inverse();由于
rNeg90 和rPos90 互为逆矩阵,可以替换使用。