CenterNet骨干网络之hourglass
CenterNet中主要提供了三个骨干网络ResNet-18(ResNet-101), DLA-34, Hourglass-104,本文从结构和代码先对hourglass进行讲解。
本文对应代码位置在:https://github.com/pprp/SimpleCVReproduction/tree/master/Simple_CenterNet
1. Ground Truth Heatmap
在开始讲解骨干网络之前,先提一下上一篇文章中有朋友问我的问题:CenterNet为什么要沿用CornerNet的半径计算方式?
查询了CenterNet论文还有官方实现的issue,其实没有明确指出为何要用CornerNet的半径,issue中回复也说是这是沿用了CornerNet的祖传代码。经过和@tangsipeng的讨论,讨论结果如下:
以下代码是涉及到半径计算的部分:
# 根据一元二次方程计算出最小的半径
radius = max(0, int(gaussian_radius((math.ceil(h), math.ceil(w)), self.gaussian_iou)))
# 得到高斯分布
draw_umich_gaussian(hmap[label], obj_c_int, radius)
在centerNet中,半径的存在主要是用于计算高斯分布的sigma值,而这个值也是一个经验性判定结果。
def draw_umich_gaussian(heatmap, center, radius, k=1):
# 得到直径
diameter = 2 * radius + 1
gaussian = gaussian2D((diameter, diameter), sigma=diameter / 6)
# 一个圆对应内切正方形的高斯分布
x, y = int(center[0]), int(center[1])
height, width = heatmap.shape[0:2]
# 对边界进行约束,防止越界
left, right = min(x, radius), min(width - x, radius + 1)
top, bottom = min(y, radius), min(height - y, radius + 1)
# 选择对应区域
masked_heatmap = heatmap[y - top:y + bottom, x - left:x + right]
# 将高斯分布结果约束在边界内
masked_gaussian = gaussian[radius - top:radius + bottom,
radius - left:radius + right]
if min(masked_gaussian.shape) > 0 and min(masked_heatmap.shape) > 0:
np.maximum(masked_heatmap, masked_gaussian * k, out=masked_heatmap)
# 将高斯分布覆盖到heatmap上,相当于不断的在heatmap基础上添加关键点的高斯,
# 即同一种类型的框会在一个heatmap某一个类别通道上面上面不断添加。
# 最终通过函数总体的for循环,相当于不断将目标画到heatmap
return heatmap
合理推测一下(不喜勿喷),之前很多人在知乎上issue里讨论这个半径计算的时候,有提到这样的问题,就是如果将CenterNet对应的2a改正确了,反而效果会差。
我觉得这个问题可能和这里的sigma=diameter / 6有一定的关系,作者当时用祖传代码(2a那部分有错)进行调参,然后确定了sigma。这时这个sigma就和祖传代码是对应的,如果修改了祖传代码,同样也需要改一下sigma或者调一下参数。
tangsipeng同学分享的文章《Training-Time-Friendly Network for Real-Time Object Detection》对应计算高斯核sigma部分就没有用cornernet的祖传代码,对应代码可以发现,这里的sigma是一个和h,w相关的超参数,也是手工挑选的。
综上,目前暂时认为CenterNet直接沿用CornerNet的祖传代码没有官方的解释,我们也暂时没有想到解释。如果对这个问题有研究的同学欢迎联系笔者。
1. Hourglass
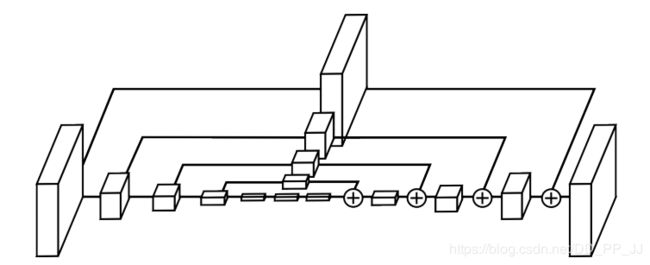
Hourglass网络结构最初是在ECCV2016的Stacked hourglass networks for human pose estimation文章中提出的,用于人体姿态估计。Stacked Hourglass就是把多个漏斗形状的网络级联起来,可以获取多尺度的信息。
Hourglass的设计比较有层次,通过各个模块的有规律组合成完整网络。
1.1 最底层:Residual模块
class residual(nn.Module):
def __init__(self, k, inp_dim, out_dim, stride=1, with_bn=True):
super(residual, self).__init__()
self.conv1 = nn.Conv2d(inp_dim,
out_dim, (3, 3),
padding=(1, 1),
stride=(stride, stride),
bias=False)
self.bn1 = nn.BatchNorm2d(out_dim)
self.relu1 = nn.ReLU(inplace=True)
self.conv2 = nn.Conv2d(out_dim,
out_dim, (3, 3),
padding=(1, 1),
bias=False)
self.bn2 = nn.BatchNorm2d(out_dim)
self.skip = nn.Sequential(nn.Conv2d(inp_dim, out_dim, (1, 1), stride=(stride, stride), bias=False),
nn.BatchNorm2d(out_dim)) \
if stride != 1 or inp_dim != out_dim else nn.Sequential()
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
conv1 = self.conv1(x)
bn1 = self.bn1(conv1)
relu1 = self.relu1(bn1)
conv2 = self.conv2(relu1)
bn2 = self.bn2(conv2)
skip = self.skip(x)
return self.relu(bn2 + skip)
就是简单的残差链接网络中的最基础的残差模块。
1.2 Hourglass子模块
class kp_module(nn.Module):
'''
kp module指的是hourglass基本模块
'''
def __init__(self, n, dims, modules):
super(kp_module, self).__init__()
self.n = n
curr_modules = modules[0]
next_modules = modules[1]
curr_dim = dims[0]
next_dim = dims[1]
# curr_mod x residual,curr_dim -> curr_dim -> ... -> curr_dim
self.top = make_layer(3, # 空间分辨率不变
curr_dim,
curr_dim,
curr_modules,
layer=residual)
self.down = nn.Sequential() # 暂时没用
# curr_mod x residual,curr_dim -> next_dim -> ... -> next_dim
self.low1 = make_layer(3,
curr_dim,
next_dim,
curr_modules,
layer=residual,
stride=2)# 降维
# next_mod x residual,next_dim -> next_dim -> ... -> next_dim
if self.n > 1:
# 通过递归完成构建
self.low2 = kp_module(n - 1, dims[1:], modules[1:])
else:
# 递归出口
self.low2 = make_layer(3,
next_dim,
next_dim,
next_modules,
layer=residual)
# curr_mod x residual,next_dim -> next_dim -> ... -> next_dim -> curr_dim
self.low3 = make_layer_revr(3, # 升维
next_dim,
curr_dim,
curr_modules,
layer=residual)
self.up = nn.Upsample(scale_factor=2) # 上采样进行升维
def forward(self, x):
up1 = self.top(x)
down = self.down(x)
low1 = self.low1(down)
low2 = self.low2(low1)
low3 = self.low3(low2)
up2 = self.up(low3)
return up1 + up2
其中有两个主要的函数make_layer和make_layer_revr,make_layer将空间分辨率降维,make_layer_revr函数进行升维,所以将这个结构命名为hourglass(沙漏)。
核心构建是一个递归函数,递归层数是通过n来控制,称之为n阶hourglass模块。
1.3 Hourglass
class exkp(nn.Module):
'''
整体模型调用
large hourglass stack为2
small hourglass stack为1
n这里控制的是hourglass的阶数,以上两个都用的是5阶的hourglass
exkp(n=5, nstack=2, dims=[256, 256, 384, 384, 384, 512], modules=[2, 2, 2, 2, 2, 4]),
'''
def __init__(self, n, nstack, dims, modules, cnv_dim=256, num_classes=80):
super(exkp, self).__init__()
self.nstack = nstack # 堆叠多次hourglass
self.num_classes = num_classes
curr_dim = dims[0]
# 快速降维为原来的1/4
self.pre = nn.Sequential(convolution(7, 3, 128, stride=2),
residual(3, 128, curr_dim, stride=2))
# 堆叠nstack个hourglass
self.kps = nn.ModuleList(
[kp_module(n, dims, modules) for _ in range(nstack)])
self.cnvs = nn.ModuleList(
[convolution(3, curr_dim, cnv_dim) for _ in range(nstack)])
self.inters = nn.ModuleList(
[residual(3, curr_dim, curr_dim) for _ in range(nstack - 1)])
self.inters_ = nn.ModuleList([
nn.Sequential(nn.Conv2d(curr_dim, curr_dim, (1, 1), bias=False),
nn.BatchNorm2d(curr_dim)) for _ in range(nstack - 1)
])
self.cnvs_ = nn.ModuleList([
nn.Sequential(nn.Conv2d(cnv_dim, curr_dim, (1, 1), bias=False),
nn.BatchNorm2d(curr_dim)) for _ in range(nstack - 1)
])
# heatmap layers
self.hmap = nn.ModuleList([
make_kp_layer(cnv_dim, curr_dim, num_classes) # heatmap输出通道为num_classes
for _ in range(nstack)
])
for hmap in self.hmap:
# -2.19是focal loss中的默认参数,论文的4.1节有详细说明,-ln((1-pi)/pi),这里的pi取0.1
hmap[-1].bias.data.fill_(-2.19)
# regression layers
self.regs = nn.ModuleList(
[make_kp_layer(cnv_dim, curr_dim, 2) for _ in range(nstack)]) # 回归的输出通道为2
self.w_h_ = nn.ModuleList(
[make_kp_layer(cnv_dim, curr_dim, 2) for _ in range(nstack)]) # wh
self.relu = nn.ReLU(inplace=True)
def forward(self, image):
inter = self.pre(image)
outs = []
for ind in range(self.nstack): # 堆叠两次hourglass
kp = self.kps[ind](inter)
cnv = self.cnvs[ind](kp)
if self.training or ind == self.nstack - 1:
outs.append([
self.hmap[ind](cnv), self.regs[ind](cnv),
self.w_h_[ind](cnv)
])
if ind < self.nstack - 1:
inter = self.inters_[ind](inter) + self.cnvs_[ind](cnv)
inter = self.relu(inter)
inter = self.inters[ind](inter)
return outs
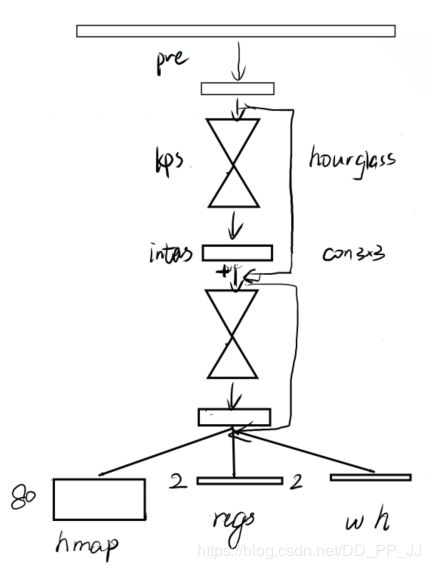
这里需要注意的是inters变量,这个变量保存的是中间监督过程,可以在这个位置添加loss,具体如下图蓝色部分所示,在这个部分可以添加loss,然后再用1x1卷积重新映射到对应的通道个数并相加。

然后再来谈三个输出,假设当前是COCO数据集,类别个数为80,那么hmap相当于输出了通道个数为80的heatmap,每个通道负责预测一个类别;wh代表对应中心点的宽和高;regs是偏置量。
CenterNet论文详解可以点击【目标检测Anchor-Free】CVPR 2019 Object as Points(CenterNet)
整个网络就梳理完成了,笔者简单画了一下nstack为2时的hourglass网络,如下图所示:
3. Reference
https://blog.csdn.net/shenxiaolu1984/article/details/51428392
http://xxx.itp.ac.cn/pdf/1603.06937.pdf
http://xxx.itp.ac.cn/pdf/1904.07850v1