pytorch-deeplab-xception项目问题-混淆矩阵和softmax特征类别设置,数据导入中心裁剪-保存分割图到TensorboardSummary
关于训练,测试时候,类别选择问题,首先是网络进入softmax之前的特征类别数目:
#Define model
model = DeepLab(num_classes=self.nclass,
backbone=args.backbone,
output_stride=args.out_stride,
sync_bn=False,
freeze_bn=False)接着是混淆矩阵类别数目:
这两个都是同一个位置来指定的:
在pytorch-deeplab-xception/dataloaders/__init__.py
def make_data_loader(args, **kwargs):
if args.dataset == 'pascal':
train_set = pascal.VOCSegmentation(args, split='train')
val_set = pascal.VOCSegmentation(args, split='val')
if args.use_sbd:
sbd_train = sbd.SBDSegmentation(args, split=['train', 'val'])
train_set = combine_dbs.CombineDBs([train_set, sbd_train], excluded=[val_set])
num_class = train_set.NUM_CLASSES
#num_class = 2
train_loader = DataLoader(train_set, batch_size=args.batch_size, shuffle=True, **kwargs)
val_loader = DataLoader(val_set, batch_size=args.batch_size, shuffle=False, **kwargs)
test_loader = None
return train_loader, val_loader, test_loader, num_class
elif args.dataset == 'cityscapes':
train_set = cityscapes.CityscapesSegmentation(args, split='train')
val_set = cityscapes.CityscapesSegmentation(args, split='val')
test_set = cityscapes.CityscapesSegmentation(args, split='test')
num_class = train_set.NUM_CLASSES
train_loader = DataLoader(train_set, batch_size=args.batch_size, shuffle=True, **kwargs)
val_loader = DataLoader(val_set, batch_size=args.batch_size, shuffle=False, **kwargs)
test_loader = DataLoader(test_set, batch_size=args.batch_size, shuffle=False, **kwargs)
return train_loader, val_loader, test_loader, num_class
elif args.dataset == 'coco':
train_set = coco.COCOSegmentation(args, split='train')
val_set = coco.COCOSegmentation(args, split='val')
num_class = train_set.NUM_CLASSES
train_loader = DataLoader(train_set, batch_size=args.batch_size, shuffle=True, **kwargs)
val_loader = DataLoader(val_set, batch_size=args.batch_size, shuffle=False, **kwargs)
test_loader = None
return train_loader, val_loader, test_loader, num_class
else:
raise NotImplementedError这里的num_class = train_set.NUM_CLASSES 指定了混淆矩阵的类别数目
如果是自己的类别,一定要修改:
num_class=(class+1)
我自己的数据集在下面训练正常,但是:
我用自己的COCO数据训练的时候,发现错误:
RuntimeError: CUDA error: device-side assert triggered void
使用pytorch的时候报这个错误说明你label中有些指不在[0, num classes), 区间左闭右开。比如类别数
num_class=3, 你的label出现了-1或者3, 4, 5等!!!!通过排查我发现了,我的类别竟然有15.明明我只设置了num_class=2
后来发现:
pytorch-deeplab-xception/dataloaders/datasets/coco.py
作者不想分类太多,只想分类一样的类别数目 21类,所以作者做了一个
索引对应
CAT_LIST = [0, 5, 2, 16, 9, 44, 6, 3, 17, 62, 21, 67, 18, 19, 4, 1, 64, 20, 63, 7, 72]通过函数去剔除不满足这些类别的COCO数据:
def _gen_seg_mask(self, target, h, w): mask = np.zeros((h, w), dtype=np.uint8) coco_mask = self.coco_mask for instance in target: rle = coco_mask.frPyObjects(instance['segmentation'], h, w) m = coco_mask.decode(rle) cat = instance['category_id'] if cat in self.CAT_LIST: c = self.CAT_LIST.index(cat) else: continue if len(m.shape) < 3: mask[:, :] += (mask == 0) * (m * c) else: mask[:, :] += (mask == 0) * (((np.sum(m, axis=2)) > 0) * c).astype(np.uint8) return mask
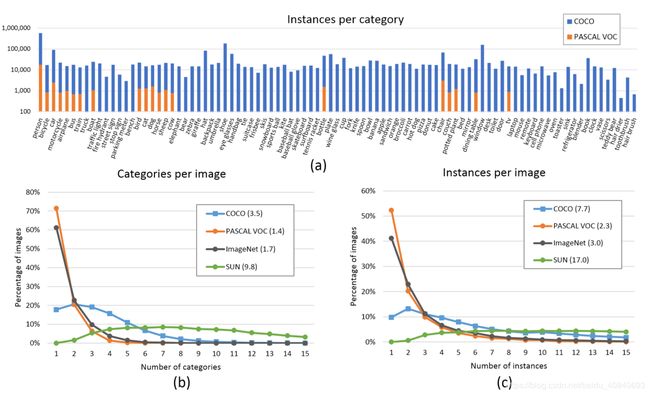
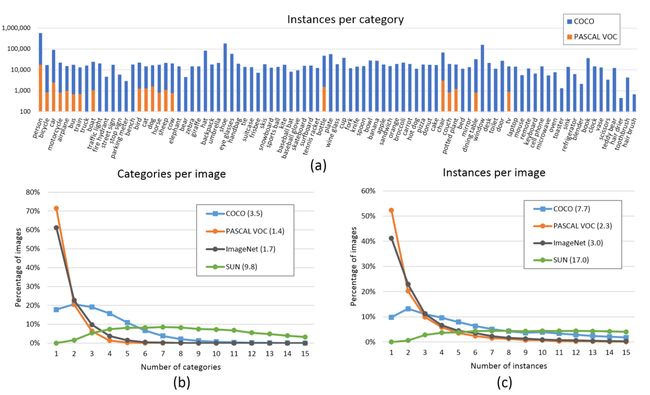
VOC:
COCO:
person bicycle car motorbike aeroplane bus train truck boat traffic_light fire_hydrant stop_sign parking_meter bench bird cat dog horse sheep cow elephant bear zebra giraffe backpack umbrella handbag tie suitcase frisbee skis snowboard sports_ball kite baseball_bat baseball_glove skateboard surfboard tennis_racket bottle wine_glass cup fork knife spoon bowl banana apple sandwich orange broccoli carrot hot_dog pizza donut cake chair sofa pottedplant bed diningtable toilet tvmonitor laptop mouse remote keyboard cell_phone microwave oven toaster sink refrigerator book clock vase scissors teddy_bear hair_drier toothbrush
这里如果我们用的是自己的数据集,需要进行改进,比如:
我的只有一类:
CAT_LIST = [0, 1]

还有一个问题,就是通过:Tensorflow去保存分割结果:
pytorch-deeplab-xception/train.py
from utils.summaries import TensorboardSummary
self.summary = TensorboardSummary(self.saver.experiment_dir)
self.writer = self.summary.create_summary() if i % (num_img_tr // 10) == 0:
global_step = i + num_img_tr * epoch
self.summary.visualize_image(self.writer, self.args.dataset, image, target, output, global_step) self.writer.add_scalar('train/total_loss_iter', loss.item(), i + num_img_tr * epoch)
# Show 10 * 3 inference results each epoch
if i % (num_img_tr // 10) == 0:
global_step = i + num_img_tr * epoch
self.summary.visualize_image(self.writer, self.args.dataset, image, target, output, global_step)
self.writer.add_scalar('train/total_loss_epoch', train_loss, epoch)
self.writer.add_scalar('val/total_loss_epoch', test_loss, epoch)
self.writer.add_scalar('val/mIoU', mIoU, epoch)
self.writer.add_scalar('val/Acc', Acc, epoch)
self.writer.add_scalar('val/Acc_class', Acc_class, epoch)
self.writer.add_scalar('val/fwIoU', FWIoU, epoch)通过pytorch-deeplab-xception/utils/summaries.py实现:
import os
import torch
from torchvision.utils import make_grid
from tensorboardX import SummaryWriter
from dataloaders.utils import decode_seg_map_sequence
class TensorboardSummary(object):
def __init__(self, directory):
self.directory = directory
def create_summary(self):
writer = SummaryWriter(log_dir=os.path.join(self.directory))
return writer
def visualize_image(self, writer, dataset, image, target, output, global_step):
grid_image = make_grid(image[:3].clone().cpu().data, 3, normalize=True)
writer.add_image('Image', grid_image, global_step)
grid_image = make_grid(decode_seg_map_sequence(torch.max(output[:3], 1)[1].detach().cpu().numpy(),
dataset=dataset), 3, normalize=False, range=(0, 255))
writer.add_image('Predicted label', grid_image, global_step)
grid_image = make_grid(decode_seg_map_sequence(torch.squeeze(target[:3], 1).detach().cpu().numpy(),
dataset=dataset), 3, normalize=False, range=(0, 255))
writer.add_image('Groundtruth label', grid_image, global_step)该可视化类调用了pytorch-deeplab-xception/dataloaders/utils.py
import matplotlib.pyplot as plt
import numpy as np
import torch
def decode_seg_map_sequence(label_masks, dataset='pascal'):
rgb_masks = []
for label_mask in label_masks:
rgb_mask = decode_segmap(label_mask, dataset)
rgb_masks.append(rgb_mask)
rgb_masks = torch.from_numpy(np.array(rgb_masks).transpose([0, 3, 1, 2]))
return rgb_masks
def decode_segmap(label_mask, dataset, plot=False):
"""Decode segmentation class labels into a color image
Args:
label_mask (np.ndarray): an (M,N) array of integer values denoting
the class label at each spatial location.
plot (bool, optional): whether to show the resulting color image
in a figure.
Returns:
(np.ndarray, optional): the resulting decoded color image.
"""
if dataset == 'pascal' or dataset == 'coco':
n_classes = 21
label_colours = get_pascal_labels()
elif dataset == 'cityscapes':
n_classes = 19
label_colours = get_cityscapes_labels()
else:
raise NotImplementedError
r = label_mask.copy()
g = label_mask.copy()
b = label_mask.copy()
for ll in range(0, n_classes):
r[label_mask == ll] = label_colours[ll, 0]
g[label_mask == ll] = label_colours[ll, 1]
b[label_mask == ll] = label_colours[ll, 2]
rgb = np.zeros((label_mask.shape[0], label_mask.shape[1], 3))
rgb[:, :, 0] = r / 255.0
rgb[:, :, 1] = g / 255.0
rgb[:, :, 2] = b / 255.0
if plot:
plt.imshow(rgb)
plt.show()
else:
return rgb
def encode_segmap(mask):
"""Encode segmentation label images as pascal classes
Args:
mask (np.ndarray): raw segmentation label image of dimension
(M, N, 3), in which the Pascal classes are encoded as colours.
Returns:
(np.ndarray): class map with dimensions (M,N), where the value at
a given location is the integer denoting the class index.
"""
mask = mask.astype(int)
label_mask = np.zeros((mask.shape[0], mask.shape[1]), dtype=np.int16)
for ii, label in enumerate(get_pascal_labels()):
label_mask[np.where(np.all(mask == label, axis=-1))[:2]] = ii
label_mask = label_mask.astype(int)
return label_mask
def get_cityscapes_labels():
return np.array([
[128, 64, 128],
[244, 35, 232],
[70, 70, 70],
[102, 102, 156],
[190, 153, 153],
[153, 153, 153],
[250, 170, 30],
[220, 220, 0],
[107, 142, 35],
[152, 251, 152],
[0, 130, 180],
[220, 20, 60],
[255, 0, 0],
[0, 0, 142],
[0, 0, 70],
[0, 60, 100],
[0, 80, 100],
[0, 0, 230],
[119, 11, 32]])
def get_pascal_labels():
"""Load the mapping that associates pascal classes with label colors
Returns:
np.ndarray with dimensions (21, 3)
"""
return np.asarray([[0, 0, 0], [128, 0, 0], [0, 128, 0], [128, 128, 0],
[0, 0, 128], [128, 0, 128], [0, 128, 128], [128, 128, 128],
[64, 0, 0], [192, 0, 0], [64, 128, 0], [192, 128, 0],
[64, 0, 128], [192, 0, 128], [64, 128, 128], [192, 128, 128],
[0, 64, 0], [128, 64, 0], [0, 192, 0], [128, 192, 0],
[0, 64, 128]])PDF下载:
http://web.eng.tau.ac.il/deep_learn/
http://web.eng.tau.ac.il/deep_learn/wp-content/uploads/2017/12/Rethinking-Atrous-Convolution-for-Semantic-Image-Segmentation-1.pdf
pytorch-deeplab-xception代码解析
https://www.jianshu.com/p/026c5d78d3b1
这个项目训练时候会有一个选项,是否中心裁剪:
def transform_val(self, sample):
composed_transforms = transforms.Compose([
tr.FixScaleCrop(crop_size=self.args.crop_size),
tr.Normalize(mean=(0.485, 0.456, 0.406), std=(0.229, 0.224, 0.225)),
tr.ToTensor()
])
return composed_transforms(sample)
def transform_tr(self, sample):
composed_transforms = transforms.Compose([
tr.RandomHorizontalFlip(),
tr.RandomScaleCrop(base_size=self.args.base_size, crop_size=self.args.crop_size),
tr.RandomGaussianBlur(),
tr.Normalize(mean=(0.485, 0.456, 0.406), std=(0.229, 0.224, 0.225)),
tr.ToTensor()])
return composed_transforms(sample)class FixScaleCrop(object):
def __init__(self, crop_size):
self.crop_size = crop_size
def __call__(self, sample):
img = sample['image']
mask = sample['label']
w, h = img.size
if w > h:
oh = self.crop_size
ow = int(1.0 * w * oh / h)
else:
ow = self.crop_size
oh = int(1.0 * h * ow / w)
img = img.resize((ow, oh), Image.BILINEAR)
mask = mask.resize((ow, oh), Image.NEAREST)
# center crop
w, h = img.size
x1 = int(round((w - self.crop_size) / 2.))
y1 = int(round((h - self.crop_size) / 2.))
img = img.crop((x1, y1, x1 + self.crop_size, y1 + self.crop_size))
mask = mask.crop((x1, y1, x1 + self.crop_size, y1 + self.crop_size))
return {'image': img,
'label': mask}
class FixedResize(object):
def __init__(self, size):
self.size = (size, size) # size: (h, w)
def __call__(self, sample):
img = sample['image']
mask = sample['label']
assert img.size == mask.size
img = img.resize(self.size, Image.BILINEAR)
mask = mask.resize(self.size, Image.NEAREST)
return {'image': img,
'label': mask}如果训练集4000*2000的图像,而训练大小是513*513,那么会把分割标注的地方中心裁剪拿去训练
而测试的时候,如果拿4000*2000的图像resize到513*513再放入网络,就效果不一定好
test测试:
https://github.com/jfzhang95/pytorch-deeplab-xception/issues/122
def save_image(self, array, id, op, oriimg=None):
text = 'gt'
if op == 0:
text = 'pred'
file_name = str(id)+'_'+text+'.png'
ori_name = str(id)+'_'+'vis'+'.png'
#513*513
r = array.copy()
g = array.copy()
b = array.copy()
if oriimg is True:
oneimgpath = str(id) + '.jpg'
from mypath import Path
#JPEGImages_gray
oneimg = Image.open(os.path.join(Path.db_root_dir('coco'), "images/test2017", oneimgpath)).convert('RGB')
crop_size = 513
w, h = oneimg.size
if w > h:
oh = crop_size
ow = int(1.0 * w * oh / h)
else:
ow = crop_size
oh = int(1.0 * h * ow / w)
img = oneimg.resize((ow, oh), Image.BILINEAR)
# center crop
w, h = img.size
x1 = int(round((w - crop_size) / 2.))
y1 = int(round((h - crop_size) / 2.))
oneimg = img.crop((x1, y1, x1 + crop_size, y1 + crop_size))
for i in range(self.nclass):
r[array == i] = self.color_map[i][0]
g[array == i] = self.color_map[i][1]
b[array == i] = self.color_map[i][2]
#513*513*3
rgb = np.dstack((r, g, b))
hh,ww,_ = rgb.shape
if oriimg is True:
oneimg = oneimg.resize((hh, ww), Image.ANTIALIAS)
save_img = Image.fromarray(rgb.astype('uint8'))
save_img.save(self.args.save_path+os.sep+file_name)
if oriimg is True:
oneimg = np.array(oneimg)
for i in range(self.nclass):
if i != 0:
index = np.argwhere(array == i)
for key in index:
oneimg[key[0]][key[1]][0] = self.color_map[i][0]
oneimg[key[0]][key[1]][1] = self.color_map[i][1]
oneimg[key[0]][key[1]][2] = self.color_map[i][2]
oneimg = Image.fromarray(oneimg.astype('uint8'))
oneimg.save(self.args.save_path+os.sep+ori_name, quality=100)使用上述代码,我发现一个问题,那就是id有可能不对应,所以换了一个方法:
def test(self):
self.model.eval()
self.evaluator.reset()
# tbar = tqdm(self.test_loader, desc='\r')
num = len(self.test_loader)
for i, sample in enumerate(self.test_loader):
image, target = sample['image'], sample['label']
print(i,"/",num)
torch.cuda.synchronize()
start = time.time()
with torch.no_grad():
output = self.model(image)
end = time.time()
times = (end - start) * 1000
print(times, "ms")
torch.cuda.synchronize()
pred = output.data.cpu().numpy()
target = target.cpu().numpy()
image1 = image.data.cpu().numpy()
# #target1 = target.cpu().numpy()
image1 = image1[0, :]
target1 = target[0, :]
# #image1.reshape([image1.size[1],image1.size[2],image1.size[3]])
# #target1.reshape([image1.size[1],image1.size[2],image1.size[3]])
image1 = image1.transpose(1,2,0)
# #target1 = target1.transpose(2,1,0)
# import cv2
# image1 = cv2.cvtColor(image1, cv2.COLOR_RGB2BGR)
# import cv2
# cv2.imwrite("./image1.jpg",image1)
cv2.imwrite("./target111.jpg", target1)
pred = np.argmax(pred, axis=1)
self.save_image(pred[0], i, 0, True, sample['ori_image'])
self.save_image(target[0], i, 1, None, sample['ori_image'])
self.evaluator.add_batch(target, pred)
def save_image(self, array, id, op, oriimg=None, image111=None):
import cv2
text = 'gt'
if op == 0:
text = 'pred'
file_name = str(id)+'_'+text+'.png'
drow_ori_name = str(id)+'_'+'vis'+'.png'
#513*513
r = array.copy()
g = array.copy()
b = array.copy()
if oriimg is True:
oneimgpath = str(id) + '.jpg'
from mypath import Path
#JPEGImages_gray
image111 = image111.data.cpu().numpy()
image111 = image111[0, :]
image111 = image111.transpose(1,2,0)
oneimg = image111
for i in range(self.nclass):
r[array == i] = self.color_map[i][2]
g[array == i] = self.color_map[i][1]
b[array == i] = self.color_map[i][0]
#513*513*3
rgb = np.dstack((r, g, b))
hh,ww,_ = rgb.shape
#if oriimg is True:
#oneimg = oneimg.resize((hh, ww), Image.ANTIALIAS)
# 原图
#image1 = cv2.cvtColor(oneimg, cv2.COLOR_RGB2BGR)
#oneimg.save(self.args.save_path + os.sep + ori_name, quality=100)
#cv2.imwrite(self.args.save_path + os.sep + ori_name, image1)
#----gt ---- pred
cv2.imwrite(self.args.save_path+os.sep+file_name, rgb)
#save_img = Image.fromarray(rgb.astype('uint8'))
# pred
#save_img.save(self.args.save_path+os.sep+file_name, quality=100)
#oneimg = oneimg.transpose(2, 0, 1)
if oriimg is True:
#oneimg = np.array(oneimg)
for i in range(self.nclass):
if i != 0:
index = np.argwhere(array == i)
for key in index:
oneimg[key[0]][key[1]][0] = oneimg[key[0]][key[1]][0] * 0.5 + self.color_map[i][0] * 0.5
oneimg[key[0]][key[1]][1] = oneimg[key[0]][key[1]][1] * 0.5 + self.color_map[i][1] * 0.5
oneimg[key[0]][key[1]][2] = oneimg[key[0]][key[1]][2] * 0.5 + self.color_map[i][2] * 0.5
#img_show[mask] = img_show[mask] * 0.5 + color_mask * 0.5
#oneimg = Image.fromarray(oneimg.astype('uint8'))
#可视化
oneimg = cv2.cvtColor(oneimg, cv2.COLOR_RGB2BGR)
#oneimg.save(self.args.save_path + os.sep + ori_name, quality=100)
cv2.imwrite(self.args.save_path + os.sep + drow_ori_name, oneimg)
#oneimg.save(self.args.save_path+os.sep+drow_ori_name, quality=100)
def training(self, epoch):
train_loss = 0.0
self.model.train()
for m in self.model.modules():
if isinstance(m, SynchronizedBatchNorm2d):
m.eval()
elif isinstance(m, nn.BatchNorm2d):
m.eval()
tbar = tqdm(self.train_loader)
or
def training(self, epoch):
train_loss = 0.0
self.model.train()
if self.args.freeze_bn:
for m in self.model.modules():
if isinstance(m, SynchronizedBatchNorm2d):
m.eval()
elif isinstance(m, nn.BatchNorm2d):
m.eval()
tbar = tqdm(self.train_loader)
num_img_tr = len(self.train_loader)
def make_data_loader(args, **kwargs):
if args.dataset == 'pascal':
train_set = pascal.VOCSegmentation(args, split='train')
val_set = pascal.VOCSegmentation(args, split='val')
if args.use_sbd:
sbd_train = sbd.SBDSegmentation(args, split=['train', 'val'])
train_set = combine_dbs.CombineDBs([train_set, sbd_train], excluded=[val_set])
num_class = train_set.NUM_CLASSES
num_class = (you.nums+1)
import os
os.environ["CUDA_DEVICE_ORDER"] = "PCI_BUS_ID"
os.environ["CUDA_VISIBLE_DEVICES"] = "0,1"
--resume ./run/pascal/deeplab-resnet/experiment_1/checkpoint.pth.tar
https://blog.csdn.net/goodxin_ie/article/details/89645358
/root/train/results/ynh_copy/anaconda3_py3.6_torch0.4.1/lib/python3.6/site-packages/torch/nn/functional.py:52: UserWarning: size_average and reduce args will be deprecated, please use reduction='elementwise_mean' instead.UserWarning: size_average and reduce args will be deprecated, please use reduction='elementwise_mean' instead.
cross_entropy(input, target, weight=None,
size_average=None, ignore_index=-100,
reduce=None,
reduction='elementwise_mean')
- size_average(该参数不建议使用,后续版本可能被废弃),该参数指定loss是否在一个Batch内平均,即是否除以N。默认为True
- reduce (该参数不建议使用,后续版本可能会废弃),首先说明该参数与size_average冲突,当该参数指定为False时size_average不生效,该参数默认为True。reduce为False时,对batch内的每个样本单独计算loss,loss的返回值Shape为[N],每一个数对应一个样本的loss。reduce为True时,根据size_average决定对N个样本的loss进行求和还是平均,此时返回的loss是一个数。
- reduction 该参数在新版本中是为了取代size_average和reduce参数的。它共有三种选项'elementwise_mean','sum'和'none'。'elementwise_mean'为默认情况,表明对N个样本的loss进行求平均之后返回(相当于reduce=True,size_average=True);'sum'指对n个样本的loss求和(相当于reduce=True,size_average=False);'none'表示直接返回n分样本的loss(相当于reduce=False)
reduction = 'elementwise_mean'
pytorch-deeplab-xception/utils/loss.py:
criterion = nn.CrossEntropyLoss(weight=self.weight, ignore_index=self.ignore_index,
size_average=self.size_average)
criterion = nn.CrossEntropyLoss(weight=self.weight, ignore_index=self.ignore_index,
reduction = 'elementwise_mean')
pytorch自带的deeplabv3
import torch
#https://pytorch.org/hub/pytorch_vision_deeplabv3_resnet101/
#torch.hub.set_dir("D:\\code\\python\\deeplabv3\\v3temp")
#model = torch.hub.load('pytorch/vision', 'deeplabv3_resnet101', pretrained=True)
import segmentation_model as segmod
model = segmod.deeplabv3_resnet101(pretrained=True, num_classes=21)
#model = segmod.fcn_resnet101(pretrained=True, num_classes=21)
model.eval()
from PIL import Image
from torchvision import transforms
input_image = Image.open("./dog.jpg")
preprocess = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
])
input_tensor = preprocess(input_image)
input_batch = input_tensor.unsqueeze(0) # create a mini-batch as expected by the model
# move the input and model to GPU for speed if available
if torch.cuda.is_available():
input_batch = input_batch.to('cuda')
model.to('cuda')
with torch.no_grad():
output = model(input_batch)['out'][0]
output_predictions = output.argmax(0)
palette = torch.tensor([2 ** 25 - 1, 2 ** 15 - 1, 2 ** 21 - 1])
colors = torch.as_tensor([i for i in range(21)])[:, None] * palette
colors = (colors % 255).numpy().astype("uint8")
# plot the semantic segmentation predictions of 21 classes in each color
r = Image.fromarray(output_predictions.byte().cpu().numpy()).resize(input_image.size)
r.putpalette(colors)
r.save("./draw_dog.png", quality=100)
#import matplotlib.pyplot as plt
#plt.imshow(r)
#plt.show()