固高运动控制卡学习1--运动模式介绍(1)--点位,Gear,Jog,插补
转载连接: https://blog.csdn.net/qq_30567891/article/details/80236106
运动模式是指规划一个或多个轴运动的方式。 运动控制器支持的运动模式有点位运动模式、 Jog运动模式、电子齿轮(即 Gear) 运动模式和插补运动模式
| GT_PrfTrap | 设置指定轴为点位模式 |
| GT_PrfJog | 设置指定轴为 Jog 模式 |
| GT_PrfGear | 设置指定轴为电子齿轮模式 |
| GT_GetPrfMode | 查询指定轴的运动模式 |
在设置或切换运动模式时,要保证轴处于规划静止状态。如果轴正在运动,请先调用GT_Stop 指令停止一个或多个轴的运动,然后再调用上表中的指令切换到想要的运动模式下。
一·、点位模式(PT)
每一个轴在规划静止时都可以设置为点位运动。在点位运动模式下,各轴可以独立设置目标位置、目标速度、加速度、减速度、起跳速度、平滑时间等运动参数,能够独立运动或停止。
| GT_PrfTrap | 设置指定轴为点位运动模式 |
| GT_SetTrapPrm | 设置点位运动模式下的运动参数 |
| GT_GetTrapPrm | 读取点位运动模式下的运动参数 |
| GT_SetPos | 设置目标位置 |
| GT_GetPos | 读取目标位置 |
| GT_SetVel | 设置目标速度 |
| GT_GetVel | 读取目标速度 |
| GT_Update | 启动点位运动 |
JOG模式关键程序步骤:
(1)配置运动控制器 --GT_LoadConfig
(2)将 AXIS 轴设为点位模式 --GT_PrfTrap
(3)设置需要修改的运动参数 --GT_GetTrapPrm
public struct TTrapPrm
{
public double acc;//加速度
public double dec;//减速度
public double velStart;//起始速度
public short smoothTime;//平滑时间
}
(4)设置 AXIS 轴的目标位置 --GT_SetPos
(5)设置 AXIS 轴的目标速度 --GT_SetVel
(6)启动AXIS轴运动 --GT_Update
(7)等待AXIS轴规划停止
(8)电机伺服关闭 --GT_AxisOff
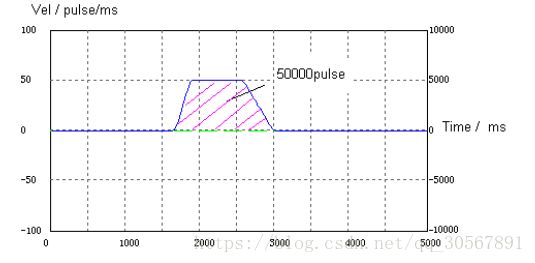
例程:将第 1 轴设定为点位运动模式,并且以速度 50pulse/ms,加速度 0.25pulse/ms2,减速度0.125pulse/ms2,平滑时间为 25ms 的运动参数正向运动 50000 个脉冲。
- {
- short sRtn;
- TTrapPrm trap;
- long sts;
- double prfPos;
- // 1、打开运动控制器
- sRtn = GT_Open();
- //2、复位运动控制器
- sRtn = GT_Reset();
- commandhandler("GT_Reset", sRtn);
- //3、 配置运动控制器
- // 注意:配置文件取消了各轴的报警和限位
- sRtn = GT_LoadConfig("test.cfg");
- // 4、清除各轴的报警和限位
- sRtn =GT_ClrSts(1, 8);
- ///5、伺服使能
- sRtn =GT_AxisOn(AXIS);
- // 位置清零
- sRt6、n = GT_ZeroPos(AXIS);
- //7、将 AXIS 轴设为点位模式
- sRtn = GT_PrfTrap(AXIS);
- //8、读取点位运动参数(需要读取所有运动参数到上位机变量)
- sRtn = GT_GetTrapPrm(AXIS, &trap);
- //9、设置需要修改的运动参数
- trap.acc = 0.25;
- trap.dec = 0.125;
- trap.smoothTime = 25;
- //10、设置点位运动参数
- sRtn = GT_SetTrapPrm(AXIS, &trap);
- //11、设置 AXIS 轴的目标位置
- sRtn = GT_SetPos(AXIS, 50000L);
- //12、设置AXIS轴的目标速度
- sRtn = GT_SetVel(AXIS, 50);
- //13、启动AXIS轴的运动
- sRtn = GT_Update(1<<(AXIS-1));
- do
- {
- // 读取AXIS轴的状态
- sRtn = GT_GetSts(AXIS, &sts);
- // 读取AXIS轴的规划位置
- sRtn = GT_GetPrfPos(AXIS, &prfPos);
- printf("sts=0x%-10lxprfPos=%-10.1lf\r", sts, prfPos);
- }while(sts&0x400);
- //14、等待AXIS轴规划停止
- //15、伺服关闭
- sRtn = GT_AxisOff(AXIS);
- printf("\nGT_AxisOff()=%d\n", sRtn);
- getch();
- return 0;
- }
二、JOG运动模式
在 Jog 运动模式下,各轴可以独立设置目标速度、加速度、减速度、平滑系数等运动参数,能够独立运动或停止
| GT_PrfJog | 设置指定轴为 Jog 运动模式 |
| GT_SetJogPrm | 设置 Jog 运动模式下的运动参数 |
| GT_GetJogPrm | 读取 Jog 运动模式下的运动参数 |
| GT_SetVel | 设置目标速度 |
| GT_GetVel | 读取目标速度 |
| GT_Update | 启动 Jog 运动 |
JOG模式关键程序步骤:
(1)配置运动控制器 --GT_LoadConfig
(2)将 AXIS 轴设为JOG模式 --GT_PrfJog
(3)设置JOG运动参数 --GT_SetJogPrm
public struct TJogPrm
public double acc;
public double dec;
public double smooth;
}
(4)设目标速度 --GT_SetVel
(5)启动 AXIS 轴的运动 --GT_Update
(6)在运动过程中可以更改运动速度 --GT_SetVel GT_Update
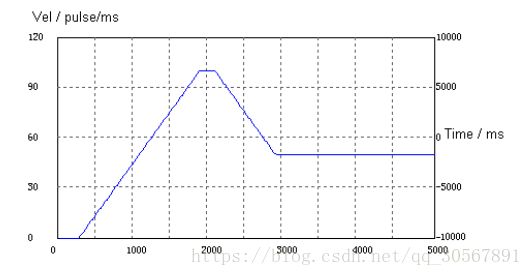
(7)伺服关闭 --GT_AxisOff例程: 轴 1 运动在 Jog 模式下,初始目标速度为 100pulse/ms 。动态改变目标速度,当规划位置超过 100000pulse 时,修改目标速度为 50 pulse/ms 。
- int main(int argc, char* argv[])
- {
- short sRtn;
- TJogPrm jog;
- long sts;
- double prfPos, prfVel;
- // 打开运动控制器
- sRtn = GT_Open();
- // 指令返回值检测,请查阅例程 3-1
- // 复位运动控制器
- sRtn = GT_Reset();
- // 配置运动控制器
- // 注意:配置文件取消了各轴的报警和限位
- sRtn = GT_LoadConfig("test.cfg");
- // 清除各轴的报警和限位
- sRtn =GT_ClrSts(1, 8);
- // 伺服使能
- sRtn = GT_AxisOn(AXIS);
- // 位置清零
- sRtn = GT_ZeroPos(AXIS);
- // 将 AXIS 轴设为 Jog 模式
- sRtn = GT_PrfJog(AXIS);
- // 读取 Jog 运动参数(需要读取全部运动参数到上位机变量)
- sRtn =GT_GetJogPrm(AXIS, &jog);
- //设置需要修改的运动参数
- jog.acc = 0.0625;
- jog.dec = 0.0625;
- // 设置 Jog 运动参数
- sRtn = GT_SetJogPrm(AXIS, &jog);
- // 设置 AXIS 轴的目标速度
- sRtn = GT_SetVel(AXIS, 100);
- // 启动 AXIS 轴的运动
- sRtn = GT_Update(1<<(AXIS-1));
- while(1)
- {
- // 读取AXIS轴的状态
- sRtn = GT_GetSts(AXIS, &sts);
- // 读取AXIS轴的规划位置
- sRtn = GT_GetPrfPos(AXIS, &prfPos);
- // 读取AXIS轴的规划速度
- sRtn = GT_GetPrfVel(AXIS, &prfVel);
- printf("sts=0x%-10lxprfPos=%-10.1lfprfVel=%-10.1lf\r", sts, prfPos, prfVel);
- if(prfPos>= 100000)
- {
- // 设置AXIS轴新的目标速度
- sRtn = GT_SetVel(AXIS, 50);
- // AXIS轴新的目标速度生效
- sRtn = GT_Update(1<<(AXIS-1));
- break;
- }
- }
- while(!kbhit())
- {
- // 读取AXIS轴的状态
- sRtn = GT_GetSts(AXIS, &sts);
- // 读取AXIS轴的规划位置
- sRtn = GT_GetPrfPos(AXIS, &prfPos);
- // 读取AXIS轴的规划速度
- sRtn = GT_GetPrfVel(AXIS, &prfVel);
- printf("sts=0x%-10lxprfPos=%-10.1lfprfVel=%-10.1lf\r", sts, prfPos, prfVel);
- }
- // 伺服关闭
- sRtn = GT_AxisOff (AXIS);
- printf("\nGT_AxisOff()=%d\n", sRtn);
- getch();
- return 0;
- }
三、电子齿轮模式(Gear)
电子齿轮模式能够将两轴或多轴联系起来,实现精确的同步运动,从而替代传统的机械齿轮连接。
我们把被跟随的轴叫主轴,把跟随的轴叫从轴。电子齿轮模式下, 1 个主轴能够驱动多个从轴,从轴可以跟随主轴的规划位置、编码器位置。
传动比:主轴速度与从轴速度的比例。电子齿轮模式能够灵活的设置传动比,节省机械系统的安装时间。当主轴速度变化时,从轴会根据设定好的传动比自动改变速度。电子齿轮模式也能够在运动过程中修改传动比。
| GT_PrfGear | 设置指定轴为电子齿轮运动模式 |
| GT_SetGearMaster | 设置电子齿轮运动跟随主轴 |
| GT_GetGearMaster | 读取电子齿轮运动跟随主轴 |
| GT_SetGearRatio | 设置电子齿轮比 |
| GT_GetGearRatio | 读取电子齿轮比 |
| GT_GearStart | 启动电子齿轮运动 |
Gear模式关键程序步骤:
1、控制卡配置
(1)配置运动控制器 --GT_LoadConfig
2、主轴配置
(1)将 AXIS 轴设为JOG模式 --GT_PrfJog
(2)设置JOG运动参数 --GT_SetJogPrm
public struct TJogPrm
{
public double acc;
public double dec;
public double smooth;
}
(3)设目标速度 --GT_SetVel
(4)启动主轴的运动 --GT_Update
3、从轴配置
(1)将从轴设为 Gear 模式 --GT_PrfGear
(2)设置主轴,默认跟随主轴规划位置 --GT_SetGearMaster(SLAVE, MASTER)
(3)设置从轴的传动比和离合区 --GT_SetGearRatio(SLAVE, 2, 1, 100000)
说明:
1) 调 用 GT_SetGearRatio(short profile, long masterEven, long slaveEven, long masterSlope)
指令来设置传动比和离合区。 profile 是从轴轴号; masterEven 是主轴位
移, slaveEven 是从轴位移, masterEven/slaveEven 等于传动比; slope 是主轴离合
区位移,即主轴在离合区内走过的位移,用户应自行计算出来。
2) 如果从轴轴号为 slave,当主轴位移 alpha 时从轴位移 beta,主轴运动 slope 位移后从
轴到达设定传动比,应当调用以下指令:GT_SetGearRatio(slave, alpha, beta, slope);
(4)启动从轴 --GT_GearStart
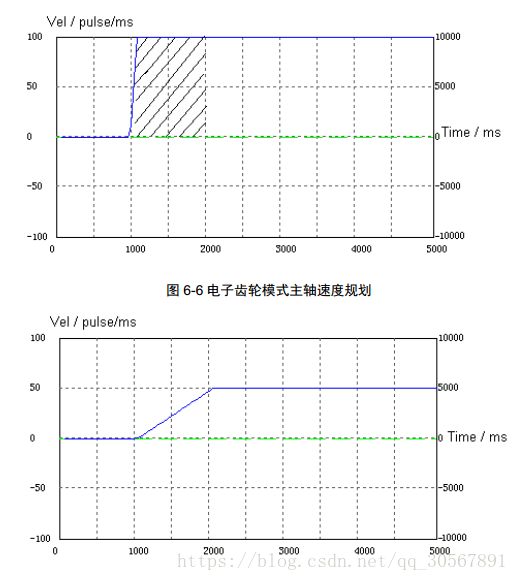
示例:主轴为 Jog 模式,从轴为电子齿轮模式,传动比为主轴速度:从轴速度=2: 1,主轴运动离合区位移后(图中阴影部分的区域),从轴达到设定的传动比。
- int main(int argc, char* argv[])
- {
- short sRtn;
- double prfVel[8];
- TJogPrm jog;
- // 打开运动控制器
- sRtn = GT_Open();
- // 复位运动控制器
- sRtn = GT_Reset();
- // 配置运动控制器
- // 注意:配置文件 test.cfg 取消了各轴的报警和限位
- sRtn = GT_LoadConfig("test.cfg");
- // 清除各轴的报警和限位
- sRtn =GT_ClrSts(1, 8);
- // 伺服使能
- sRtn = GT_AxisOn(MASTER);
- sRtn = GT_AxisOn(SLAVE);
- // 位置清零
- sRtn = GT_ZeroPos(MASTER);
- sRtn = GT_ZeroPos(SLAVE);
- // 1、将主轴设为 Jog 模式
- sRtn = GT_PrfJog(MASTER);
- //2、设置主轴运动参数
- sRtn =GT_GetJogPrm(MASTER, &jog);
- jog.acc = 1;
- sRtn = GT_SetJogPrm(MASTER, &jog);
- sRtn = GT_SetVel(MASTER, 100);
- //3、启动主轴
- sRtn = GT_Update(1<<(MASTER-1));
- // 将从轴设为 Gear 模式
- sRtn = GT_PrfGear(SLAVE);
- // 设置主轴,默认跟随主轴规划位置
- sRtn = GT_SetGearMaster(SLAVE, MASTER);
- // 设置从轴的传动比和离合区
- sRtn = GT_SetGearRatio(SLAVE, 2, 1, 100000);
- // 启动从轴
- sRtn =GT_GearStart(1<<(SLAVE-1));
- while(!kbhit())
- {
- // 查询各轴的规划速度
- sRtn = GT_GetPrfVel(1, prfVel, 8);
- printf("master vel=%-10.2lf\tslave vel=%-10.2lf\r",
- prfVel[MASTER-1], prfVel[SLAVE-1]);
- }
- // 伺服关闭
- sRtn = GT_AxisOff (MASTER);
- printf("\nGT_AxisOff()=%d, Axis:%d\n", sRtn, MASTER);
- sRtn = GT_AxisOff (SLAVE);
- printf("\nGT_AxisOff()=%d, Axis:%d\n", sRtn, SLAVE);
- getch();
- return 0;
- }
四、插补运动模式
| GT_SetCrdPrm | 设置坐标系参数,确立坐标系映射,建立坐标系 |
| GT_GetCrdPrm | 查询坐标系参数 |
| GT_CrdData | 向插补缓存区增加插补数据 |
| GT_LnXY | 缓存区指令,二维直线插补 |
| GT_LnXYZ | 缓存区指令,三维直线插补 |
| GT_LnXYZA | 缓存区指令,四维直线插补 |
| GT_LnXYG0 | 缓存区指令,二维直线插补(终点速度始终为 0) |
| GT_LnXYZG0 | 缓存区指令,三维直线插补(终点速度始终为 0) |
| GT_LnXYZAG0 | 缓存区指令,四维直线插补(终点速度始终为 0) |
| GT_ArcXYR | 缓存区指令, XY 平面圆弧插补(以终点位置和半径为输入参数) |
| GT_ArcXYC | 缓存区指令, XY 平面圆弧插补(以终点位置和圆心位置为输入参数) |
| GT_ArcYZR | 缓存区指令, YZ 平面圆弧插补(以终点位置和半径为输入参数) |
| GT_ArcYZC | 缓存区指令, YZ 平面圆弧插补(以终点位置和圆心位置为输入参数) |
| GT_ArcZXR | 缓存区指令, ZX 平面圆弧插补(以终点位置和半径为输入参数) |
| GT_ArcZXC | 缓存区指令, ZX 平面圆弧插补(以终点位置和圆心位置为输入参数) |
| GT_BufIO | 缓存区指令,缓存区内数字量 IO 输出设置指令 |
| GT_BufDelay | 缓存区指令,缓存区内延时设置指令 |
| GT_BufDA | 缓存区指令,缓存区内输出 DA 值 |
| GT_BufLmtsOn | 缓存区指令,缓存区内有效限位开关 |
| GT_BufLmtsOff | 缓存区指令,缓存区内无效限位开关 |
| GT_BufSetStopIo | 缓存区指令,缓存区内设置 axis 的停止 IO 信息 |
| GT_BufMove | 缓存区指令,实现刀向跟随功能,启动某个轴点位运动 |
| GT_BufGear | 缓存区指令,实现刀向跟随功能,启动某个轴跟随运动 |
| GT_CrdSpace | 查询插补缓存区剩余空间 |
| GT_CrdClear | 清除插补缓存区内的插补数据 |
| GT_CrdStart | 启动插补运动 |
| GT_CrdStatus | 查询插补运动坐标系状态 |
| GT_SetUserSegNum | 缓存区指令,设置自定义插补段段号 |
| GT_GetUserSegNum | 读取自定义插补段段号 |
| GT_GetRemainderSegNum | 读取未完成的插补段段数 |
| GT_SetOverride | 设置插补运动目标合成速度倍率 |
| GT_SetCrdStopDec | 设置插补运动平滑停止、急停合成加速度 |
| GT_GetCrdStopDec | 查询插补运动平滑停止、急停合成加速度 |
| GT_GetCrdPos | 查询该坐标系的当前坐标位置值 |
| GT_GetCrdVel | 查询该坐标系的合成速度值 |
| GT_InitLookAhead | 初始化插补前瞻缓存区 |
使用插补模式需要至少两步操作:建立坐标系和向缓存区存入数据。下面分别就这两个步骤分别进行详细讲解。
(一)建立坐标系
建立坐标系就是初始化 TCrdPrm 结构体。
- public struct TCrdPrm
- {
- public short dimension; //
- public short profile1; // 分别规划轴1~8.如果规划轴.没有对应到该坐标系,则 profile[x]的值为 0;
- public short profile2;
- public short profile3; //如果对应到了 X 轴,则 profile[x]为 1,Y 轴对应为 2, Z 轴对应为 3, A 轴对应为 4。
- public short profile4;
- public short profile5; //每个元素的取值范围: [0, 4]
- public short profile6;
- public short profile7;
- public short profile8;
- public double synVelMax; //
- public double synAccMax; //
- public short evenTime; //最小匀速时间 ,取值范围: (0, 32767)
- public short setOriginFlag; //是否需要指定坐标系的原点坐标的规划位置.0:不需要指定原点坐标值,则坐标系
- //的原点在当前规划位置上。 1:需要指定原点坐标值,坐标系的原点在 originPos指
- //定的规划位置上。
- public int originPos1;
- public int originPos2; //指定的坐标系原点的规划位置值
- public int originPos3;
- public int originPos4;
- public int originPos5;
- public int originPos6;
- public int originPos7;
- public int originPos8;
- }
例程:建立了一个二维坐标系,规划轴 1 对应为 x 轴,规划轴 2 对应为 y 轴,坐标系原点的规划位置是(100, 100), 单位: pulse,在此坐标系内运动的最大合成速度为 500pulse/ms,最大合成加速度为 1pulse/ms^2, 最小匀速时间为 50ms。
- TCrdPrm crdPrm;
- // 将结构体变量初始化为0
- memset(&crdPrm, 0, sizeof(crdPrm));
- // 为结构体赋值
- crdPrm.dimension=2; // 坐标系为二维坐标系
- crdPrm.synVelMax=500; // 最大合成速度: 500pulse/ms
- crdPrm.synAccMax=1; // 最大加速度: 1pulse/ms^2
- crdPrm.evenTime = 50; // 最小匀速时间: 50ms
- crdPrm.profile[0] = 1; // 规划器1对应到X轴
- crdPrm.profile[1] = 2; // 规划器2对应到Y轴
- crdPrm.setOriginFlag = 1; // 表示需要指定坐标系的原点坐标的规划位置
- crdPrm.originPos[0] = 100; // 坐标系的原点坐标的规划位置为(100, 100)
- crdPrm.originPos[1] = 100;
- //
- sRtn = GT_SetCrdPrm(

(二)向缓存区存入数据
步骤:
(a)首先清除缓存区中的数据。--GT_CrdClear(坐标系号,缓冲区号)
(b)向对应坐标系的相应缓冲区添加运行或动作数据。 --GT_ArcXYR,GT_LnXYZG0,GT_LnXY,GT_BufDelay等
(c)启动插补运动。 --GT_CrdStart
(1)直线插补例程
假设某数控机床刀具在 xy 平面从原点出发,走一段如图 6-12 所示的正六边形轨迹。一共需要
走七段轨迹,图中标号已标出。每走完一段轨迹会输出一次 IO 信号,并且暂停 400ms。
- // 即将把数据存入坐标系1的FIFO0中,所以要首先清除此缓存区中的数据
- sRtn =
- // 向缓存区写入第一段插补数据
- sRtn =
- 1, // 该插补段的坐标系是坐标系1
- 200000, 0, // 该插补段的终点坐标(200000, 0)
- 100, // 该插补段的目标速度: 100pulse/ms
- 0.1, // 插补段的加速度: 0.1pulse/ms^2
- 0, // 终点速度为0
- 0); // 向坐标系1的FIFO0缓存区传递该直线插补数据
- // 向缓存区写入第二段插补数据
- sRtn = GT_LnXY(1, 100000, 173205, 100, 0.1, 0, 0);
- // 缓存区数字量输出
- sRtn =
- 1, // 坐标系是坐标系1
- MC_GPO, // 数字量输出类型:通用输出
- 0xffff, // bit0~bit15全部都输出
- 0x55, // 输出的数值为0x55
- 0); // 向坐标系1的FIFO0缓存区传递该数字量输出
- // 缓存区延时指令
- sRtn =
- 1, // 坐标系是坐标系1
- 400, // 延时400ms
- 0); // 向坐标系1的FIFO0缓存区传递该延时
- // 启动坐标系1的FIFO0的插补运动
- sRtn =
- do
- {
- // 查询坐标系1的FIFO的插补运动状态
- sRtn =
- 1, // 坐标系是坐标系1
- &run, // 读取插补运动状态
- &segment, // 读取当前已经完成的插补段数
- 0); // 查询坐标系1的FIFO0缓存区
- // 坐标系在运动, 查询到的run的值为1
- }while(run == 1);
- ......

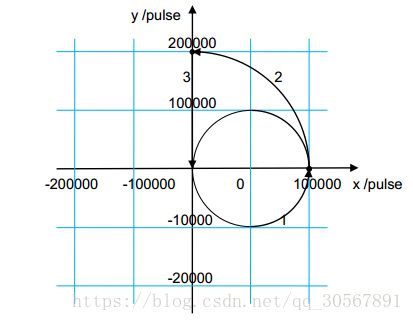
(2)圆弧插补指令分为两种:
a) 半径描述方法 --GT_ArcXYR、 GT_ArcYZR、 GT_ArcZXR
b) 圆心坐标描述方法 -- GT_ArcXYC、 GT_ArcYZC、 GT_ArcZXC
- // 即将把数据存入坐标系1的FIFO0中,所以要首先清除此缓存区中的数据
- sRtn = GT_CrdClear(1, 0);
- // 向缓存区写入第一段插补数据
- sRtn =
- 1, // 该插补段的坐标系是坐标系1
- 200000, 0, // 该插补段的终点坐标(200000, 0)
- 100, // 该插补段的目标速度: 100pulse/ms
- 0.1, // 插补段的加速度: 0.1pulse/ms^2
- 0, // 终点速度为0
- 0); // 向坐标系1的FIFO0缓存区传递该直线插补数据
- // 向缓存区写入第二段插补数据,该段数据是以圆心描述方法描述了一个整圆
- sRtn =
- 1, // 坐标系是坐标系1
- 200000, 0, // 该圆弧的终点坐标(200000, 0)
- -100000, 0, // 圆弧插补的圆心相对于起点位置的偏移量(-100000, 0)
- 0, // 该圆弧是顺时针圆弧
- 100, // 该插补段的目标速度: 100pulse/ms
- 0.1, // 该插补段的加速度: 0.1pulse/ms^2
- 0, // 终点速度为0
- 0); // 向坐标系1的FIFO0缓存区传递该直线插补数据
- // 向缓存区写入第三段插补数据,该段数据是以半径描述方法描述了一个1/4圆弧
- sRtn =
- 1, // 坐标系是坐标系1
- 0, 200000, // 该圆弧的终点坐标(0, 200000)
- 200000, // 半径: 200000pulse
- 1, // 该圆弧是逆时针圆弧
- 100, // 该插补段的目标速度: 100pulse/ms
- 0.1, // 该插补段的加速度: 0.1pulse/ms^2
- 0, // 终点速度为0
- 0); // 向坐标系1的FIFO0缓存区传递该直线插补数据
- // 向缓存区写入第四段插补数据,回到原点位置
- sRtn =
- //启动坐标系1的FIFO0的插补运动
- sRtn =
- do
- {
- // 查询坐标系1的FIFO的插补运动状态
- sRtn =
- 1, // 坐标系是坐标系1
- &run, // 读取插补运动状态
- &segment, // 读取当前已经完成的插补段数
- 0); // 查询坐标系1的FIFO0缓存区
- // 坐标系在运动, 查询到的run的值为1
- }while(run == 1);