第一章 线性规划
1.1线性规划问题(LP)
1.1.1 重要概念
决策变量:所需求问题的解
目标函数:所需求问题的表达式
约束条件(s.t.):题给范围及实际情况
线性规划问题:目标函数和约束条件均为线性函数
(数学)标准型:
可行解:满足s.t.的解----->最优解
可行域:所有可行解的集合
1.1.2程序实现
matlab中标准形式: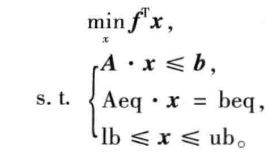
例如:
化为标准形式为: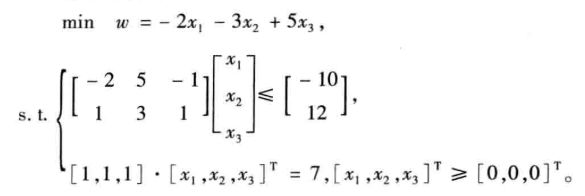
- 目标函数一定要是求最小值
- 约束条件不等号一定要是小于(等于)
- 等于需单独列出
程序如下:
f=[-2; -3; 5];%目标函数系数
a=[-2,5,-1;1,3,1];%不等号系数
b=[-10;12];%不等号结果
aeq=[1,1,1];%等号s.t.系数
beq=7;%等号s.t.结果
[x,y]=linprog(f,a,b,aeq,beq,zeros(3,1));
%调用函数,若没有等值约束则aeq,beq为[]
x, y=-y%结果y加负号,恢复原值
1.1.3转化问题
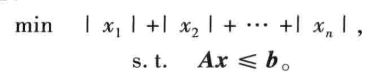
构造如下:
对任意的x,存在非负数u,v满足:
x = u - v,| x | = u + v
令 u = (x + |x|) / 2,v = (|x| - x) / 2
转化为标准形式为:
1.2多目标规划模型
目标函数:
模型简化:
- 结合题意(多用于投资问题)给定界限,使其中一个函数化为约束条件,只保留其中一个
- 结合题意,选择合适的权重,对目标函数进行组合
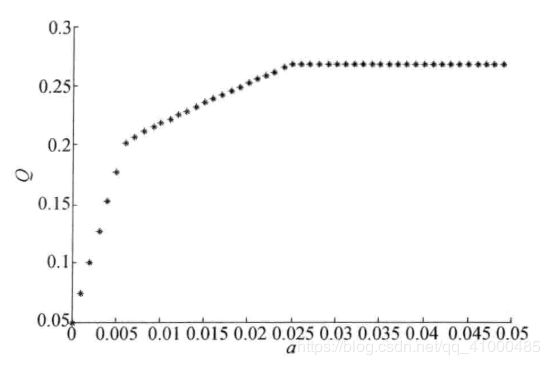
即把多目标规划问题变为单目标规划问题,在一定范围内,设置步长,进行枚举
书中以模型一的代码为例:
clc,clear
a=0;
hold on
while a<0.05
c=[-0.05,-0.27,-0.19,-0.185,-0.185];
A=[zeros(4,1),diag([0.025,0.015,0.055,0.026])];
%第一列x0为0,对角化矩阵,其余为0
b=a*ones(4,1);%4行1列的单位矩阵
Aeq=[1,1.01,1.02,1.045,1.065];
beq=1;
LB=zeros(5,1);%对0的约束
[x,Q]=linprog(c,A,b,Aeq,beq,LB);
Q=-Q;%恢复原值
plot(a,Q,'*k');
a=a+0.001;%以0.001为步长
end
xlabel('a'),ylabel('Q')
结果如图: