DOG角点检测——opencv实现
1.原理
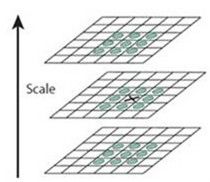
Difference of Gaussian(DOG)是高斯函数的差分。将两幅图像在不同参数下的高斯滤波结果相减,得到DoG图。步骤:
处理一幅图像在不同高斯参数下的DoG
用两个不同的5x5高斯核对图像进行卷积,然后再相减的操作。重复三次得到三个差分图A,B,C。根据DoG求角点
计算出的A,B,C三个DOG图中求图B中是极值的点。图B的点在当前由A,B,C共27个点组成的block中是否为极大值或者极小值。若满足此条件则认为是角点。
2.实现细节
2.1 差分得到DoG图
Mat Process(Mat &img, double sig1, double sig2, Size Ksize)converTo()
直接读取灰度图会得到CV_8UC1类型的mat,是单通道uchar型矩阵,因此高斯滤波后相减都是整型非负数据,影响后面进行比较取极值的步骤。所以需要将原本的数据类型转化为CV_32FC1即单通道float型数据。再进行后续的操作subtract()
两个mat类型相减直接用这个就好了。刚开始查到cvSub函数是老版本的,里面的指针乱七八糟的都挺复杂的,后在官方说明上找到这个c++版本的函数。现在的操作基本都是这个了。
2.2 求取当前block极值得到角点
Mat getExtrema(Mat &A, Mat &B, Mat &C, int thresh){}
block.release();
block.push_back(A(Range(i - 1, i + 2), Range(j - 1, j + 2)));
block.push_back(B(Range(i - 1, i + 2), Range(j - 1, j + 2)));
block.push_back(C(Range(i - 1, i + 2), Range(j - 1, j + 2)));
minMaxLoc(block, &minv, &maxv, &minLoc, &maxLoc);取出A,B,C中3x3的小块存放在一个mat里,然后利用自带的求取最大最小值函数minMaxLoc得到最大最小值和其位置。然后判断该点 (i,j) 是否为极值点。每个循环刷新释放block。
2.3 求取当前block极值得到角点
void drawExtrema(Mat &imgB, Mat &extr)将得到的极值点在原图像中显示。由于imread(img,0)得到的是单通道灰度图 ,opencv提供的cirle()和line()函数在img上无法显示,所以用imread(imgB)得到一个三通道的灰度图,然后在这个imgB上画出标记点。
2.4 讨论
用样例测试图600x1200像素点的时候,运算速度很慢,逐步运行发现时间主要消耗在getExtrema()函数上。原因可能是:
mat.push_back()截取矩阵然后合并得到新矩阵用这个操作比较费时间。如果改进的话可以直接用一个数组,将三个3x3矩阵的数据直接放进去。minMaxLoc()求取当前矩阵最大最小值和响应位置。这个函数涉及到排序可能也费时间。因为只用判断当前 (i,j) 点是否是极值,其实可以将这27个数据直接减去mat.at(i,j)根据是否都大于或者小于零来判断极值。
然而我已经懒得改了……需要优化速度的话再动手。
3.测试结果
输入图像:
输出结果:
参考
- DoG (Difference of Gaussian)角点检测
- 斑点检测
- 将mat数据输出到文件
查了很多东西最后都查到opencv的官方文档去了。调试时用到了参考链接3。
5.代码
#include