vins-fusion学习笔记
自己写着玩的,很多地方没写全或者不对,别问,问就是不知道,俺确实不知道~~
文章目录
- estimator.cpp
- getIMUInterval()
- initFirstIMUPose()
- processIMU()
- processImage()
- optimization()
- 边缘化旧帧
- 边缘化新帧
- vector2double()
- double2vector()
- updateLatestStates()
- slideWindow()
- feature_manager.cpp
- addFeatureCheckParallax()
- getCorresponding()
- CalibrationExRotation()
- initFramePoseByPnP()
- triangulate()
- triangulatePoint()
- getDepthVector()
- getFeatureCount()
- initial_alignment.cpp
- solveGyroscopeBias()
- imu_factor.h
- Evaluate()
- integration_base.h
- evaluate()
- pose_local_parameterization.cpp
- Plus()
- ComputeJacobian()
- GlobalSize()
- LocalSize()
- ProjectionTwoFrameOneCamFactor.cpp
- Evaluate()
- ProjectionTwoFrameTwoCamFactor.cpp
- Evaluate()
- ProjectionOneFrameTwoCamFactor.cpp
- Evaluate()
- marginalization_factor.cpp
- preMarginalize()
- marginalize()
- addResidualBlockInfo()
estimator.cpp
getIMUInterval()
- double t0, double t1,
- vector
- vector
- 输入pre_time和cur_time, 获得这个时间段内的acc和gyr数据,并存入到vector中
- 主要是时间上的逻辑
initFirstIMUPose()
vector<pair<double, Eigen::Vector3d>> &accVector
- 初始化当前一段时间内的加速度计的数据
- 首先会将当前一段时间的加速度计的值取平均值,然后g2R(averACC)这个函数
- g2R()
- R2ypr()
- ypr2R
- 上面三个操作是把imu坐标系与重力坐标系对齐 g i m u = [ − 9.4 ; − 2.3 ; 0.4 ] g_{imu} = [-9.4; -2.3; 0.4] gimu=[−9.4;−2.3;0.4]变到 g = [ 0 ; 0 ; 9.8 ] g = [0; 0; 9.8] g=[0;0;9.8], 并且保证坐标系中yaw的值为0
- 参考博客
- a t a n 2 ( y , x ) atan2(y,x) atan2(y,x)求的是y/x的反正切,其返回值为[-pi,+pi]之间的一个数, a t a n 2 ( y , x ) atan2(y,x) atan2(y,x)所表达的意思是坐标原点为起点,指向(y,x)的射线在坐标平面上与x轴正方向之间的角的角度度。当y>0时,射线与x轴正方向的所得的角的角度指的是x轴正方向绕逆时针方向到达射线旋转的角的角度;而当y<0时,射线与x轴正方向所得的角的角度指的是x轴正方向绕顺时针方向达到射线旋转的角的角度
- 之后会得到一个初始化的 R 0 R_0 R0, 这个 R 0 R_0 R0存入滑动窗口的世界坐标系下的旋转 R s [ 0 ] Rs[0] Rs[0]
processIMU()
- 这里是处理prev_time和cur_time中imu数据, 也是imu预积分公式处理的地方,这里是为了完成三件事:
- 更新当前的预积分量
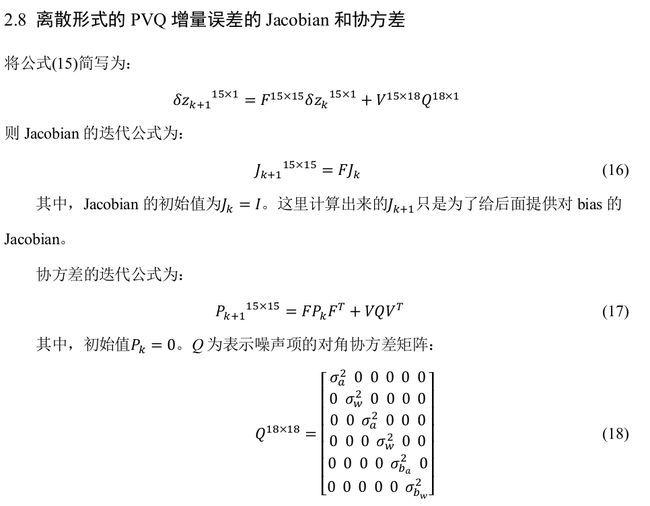
- 更新IMU残差的协防差矩阵
- 更新IMU残差对于bias的雅克比矩阵
- frame_count 代表当前处理的这一帧在滑动窗口中的第几个, 取值范围是在0到WINDOW_SIZE之间
pre_integrations[frame_count] = new IntegrationBase{acc_0, gyr_0, Bas[frame_count], Bgs[frame_count]};
- 对这个滑动窗口的起始帧进行赋值处理, new一个预积分, 其中初始化的参数包括:
- acc_0, gyr_0,linearized_acc, linearized_gyr 初始预积分的值以及后面更新时每一帧的acc和gyr的值
- linearized_ba,linearized_bg 加速度的偏置以及陀螺仪的偏置,初始化的时候都为 [ 0 ; 0 ; 0 ] [0;0;0] [0;0;0]
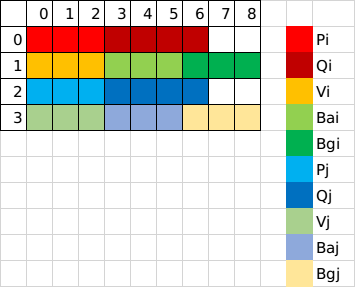
- jacobian 初始化为 15 × 15 15 \times 15 15×15维的单位矩阵
- covariance 初始化为 15 × 15 15 \times 15 15×15维的零矩阵
- sum_dt 初始化为0
- delta_p 初始化为 3 × 1 3 \times 1 3×1维的单位矩阵
- delta_q 初始化为单位四元数
- delta_v 初始化为零矩阵
- noise 初始化为 18 × 18 18 \times 18 18×18维的噪声矩阵, 噪声项的对角协方差矩阵,imu标定拿到的参数
- acc_0, gyr_0
- 预积分开头的帧当前的加速度以及角速度,因此这里需要知道 a c c 0 acc_0 acc0和 g y r 0 gyr_0 gyr0,之后每次预积分都要更新 a c c 0 acc_0 acc0和 g y r 0 gyr_0 gyr0
- 预积分计算的是两帧图像之间积分的值 P , v , q P, v, q P,v,q,通过一帧帧imu帧的迭代求解来获得
- 通过对pre_integrations进行push_back(),可以迭代求解出最终两帧图像间预积分的值
- 通过IMU的这些数据,来更新三个状态量,Ps,Vs,Rs(这个是绝对坐标系下的位姿)。这时候不是用预积分,而是用正常普通的积分并且用上中值积分
processImage()
- 这个函数主要用来处理图像的特征
processImage(feature.second, feature.first) - first是时间,second是featureFrame
- featureFrame这个容器存储:
- xyz_uv_velocity <<
- x
- y
- z
- p_u
- p_v
- velocity_x
- velocity_y;
- xyz_uv_velocity <<
featureFrame[feature_id].emplace_back(camera_id, xyz_uv_velocity);
featureBuf.push(make_pair(t, featureFrame));
- 首先是这个逻辑, VINS里为了控制优化计算量,在实时情况下,只对当前帧之前某一部分帧进行优化,而不是全部历史帧。局部优化帧的数量就是窗口大小。为了维持窗口大小,需要去除旧的帧添加新的帧,也就是边缘化Marginalization。到底是删去最旧的帧(MARGIN_OLD)还是删去刚刚进来窗口倒数第二帧(MARGIN_SECOND_NEW),就需要对当前帧与之前帧进行视差比较,如果是当前帧变化很小,就会删去倒数第二帧,如果变化很大,就删去最旧的帧
if (f_manager.addFeatureCheckParallax(frame_count, image, td))
{
marginalization_flag = MARGIN_OLD;
}
else
{
marginalization_flag = MARGIN_SECOND_NEW;
}
- 接着判断ESTIMATE_EXTRINSIC这个参数的值,也就是对imu和camera的外参是否需要标定
- 外参标定结束后,判断当前使用了哪些传感器,双目,单目还是imu
- 开始进行初始化,单目+imu, 双目+imu,纯双目
- 进入双目加imu的程序中:
- 首先进行三角化,初始没有说3d point不能进行pnp求解
- 之后回到pnp求解那里,解出相机的位姿
- 这个时候判断帧数是否到达了滑动窗口的大小,如果到达了则进入solveGyroscopeBias函数
optimization()
- vector2double(), 确定需要优化的变量
- 开始构建最小二乘问题, 添加估计量
problem.AddParameterBlock(para_Pose[i], SIZE_POSE, local_parameterization);
problem.AddParameterBlock(para_SpeedBias[i], SIZE_SPEEDBIAS);
problem.AddParameterBlock(para_Ex_Pose[i], SIZE_POSE, local_parameterization);
problem.AddParameterBlock(para_Td[0], 1);
- 构建imu的约束项IMUfactor, 包括imu的待估计量以及残差雅克比
IMUFactor *imu_factor = new IMUFactor(pre_integrations[j]);
problem.AddResidualBlock(imu_factor, NULL, para_Pose[i], para_SpeedBias[i], para_Pose[j], para_SpeedBias[j]);
- 构建image的约束项
- VINS中地图点的参数化形式是逆深度的形式, 残差的计算对于双目相机有多种情况, 分别是
- ProjectionOneFrameTwoCamFactor
- ProjectionTwoFrameOneCamFactor
- ProjectionTwoFrameTwoCamFactor
- 残差的计算给出了两种形式:
- 第一种是在归一化平面上的重投影误差
- 第二种是把归一化平面上的重投影误差投影到Unit sphere的误差
- 论文中给出的是第二种,而代码中两种误差都保留了,并用宏
UNIT_SPHERE_ERROR进行控制。
- ceres进行求解
- 使用double2vector()函数将优化参数恢复到滑动窗口内
- 构建边缘化的约束项, 有两种情况
- 一种是边缘化旧帧,
- 一种是边缘化新帧
- 如何判断边缘化旧帧还是新帧在processIMage()函数中的视差计算中得到,只有在当前帧变化过大时才会选择去边缘化旧帧,如果当前帧的视差变化较小,可以选择边缘化新进入的帧
if (marginalization_flag == MARGIN_OLD){...}
else{...}
- 开始进行两种边缘化策略,一种是边缘化旧帧,一种是边缘化新帧
边缘化旧帧
- 首先new一个类
MarginalizationInfo *marginalization_info = new MarginalizationInfo();
- 包含一些相关的变量
//各个优化变量的长度: 存放地址和长度
std::unordered_map<long, int> parameter_block_size;
//各个优化变量的id: 存放地址, value都为0
std::unordered_map<long, int> parameter_block_idx;
//各个优化变量对应的double指针类型的数据
std::unordered_map<long, double *> parameter_block_data;
- 进行边缘化之后保留下来的
//各个优化变量的长度
std::vector<int> keep_block_size;
//各个优化变量的id
std::vector<int> keep_block_idx;
//各个优化变量对应的double指针类型的数据
std::vector<double *> keep_block_data;
- 边缘化之后从信息矩阵恢复出来
//雅克比矩阵
Eigen::MatrixXd linearized_jacobians;
//残差向量
Eigen::VectorXd linearized_residuals;
- 执行vector2double()函数
- 判断是否存在先验信息以及是否有效,如果有效就添加先验残差项,
addResidualBlockInfo()函数添加残差项目
if (last_marginalization_info && last_marginalization_info->valid)
{
...
}
- 如果需要添加先验残差项,则新建容器drop_set,在先验帧的size中进行循环,比如在先验帧看到68个路标点,那么size()应该为 11 P o s e + 11 V + 2 E x + 68 λ + t d = 11 ∗ 6 + 11 ∗ 9 + 2 ∗ 6 + 68 + 1 11Pose+11V+2Ex+68\lambda+td = 11*6+11*9+2*6+68+1 11Pose+11V+2Ex+68λ+td=11∗6+11∗9+2∗6+68+1
- P ( x , y , z , θ x , θ y , θ z ) P(x, y,z, \theta_x, \theta_y, \theta_z) P(x,y,z,θx,θy,θz) 相机位姿6维
- V ( v x , v y , v z , b a x , b a y , b a z , b g x , b g y , b g z ) V(v_x, v_y,v_z,ba_x, ba_y,ba_z, bg_x,bg_y,bg_z ) V(vx,vy,vz,bax,bay,baz,bgx,bgy,bgz) 相机速度、加速度偏置、角速度偏置9维
- E x ( t i c , r i c ) Ex(t_{ic},r_{ic}) Ex(tic,ric) 相机IMU外参6维
- λ \lambda λ 特征点逆深度$1维
- t d td td 标定同步时间1维
- para_Pose[0], para_SpeedBias[0]是要被marg的量, 也就是滑窗内的第一个量,因此把这里的ipush进去
drop_set.push_back(i); - 构建imu的约束项
- 计算残差和雅克比,第0帧和第1帧之间的IMU预积分值以及第0帧和第1帧相关优化变量(需要marg),
vector添加imu残差addResidualBlockInfo(){0, 1}
- 计算残差和雅克比,第0帧和第1帧之间的IMU预积分值以及第0帧和第1帧相关优化变量(需要marg),
- 构建image的约束项
- 计算残差和雅克比,这里需要注意双目相机的约束项会比单目多一些,同样添加残差addResidualBlockInfo(), 注意image会用到loss_function(核函数)
vector<int>{0, 3}
vector<int>{0, 4}
vector<int>{2}
- preMarginalize() 预处理函数,对于变量和内存的关联
- marginalize()边缘化
- 滑窗预移动,对指针进行一次移动操作而不是真正的滑窗
边缘化新帧
- 边缘化新帧marginalization_flag = MARGIN_SECOND_NEW
- 与边缘化旧帧操作基本相同
vector2double()
- 拿到滑动窗口中的各项状态估计参数,这些参数主要有
-
i为滑动窗口的几帧
-
世界坐标系下的位置和旋转
-
世界坐标系下的位置para_Pose ( x , y , z ) (x, y, z) (x,y,z) [ 0 1 2 ] [0\quad1\quad2] [012]
- Ps[i].x()
- Ps[i].y()
- Ps[i].z()
-
世界坐标系下的旋转para_Pose q q q [ 3 4 5 6 ] [3\quad4\quad5\quad6] [3456]
- q= Rs[i]
- q.x
- q.y
- q.x
- q.w
-
对于imu而言需要优化的有速度,速度偏置,陀螺仪偏置
-
速度para_SpeedBias ( x , y , z ) (x,y,z) (x,y,z) [ 0 1 2 ] [0\quad1\quad2] [012]
-
Vs[i].x
-
Vs[i].y
-
Vs[i].z
-
加速度偏置para_SpeedBias ( x , y , z ) (x,y,z) (x,y,z) [ 3 4 5 ] [3\quad4\quad5] [345]
-
Bas[i].x
-
Bas[i].y
-
Bas[i].z
-
陀螺仪偏置para_SpeedBias ( x , y , z ) (x,y,z) (x,y,z) [ 6 7 8 ] [6\quad7\quad8] [678]
- Bgs[i].x()
- Bgs[i].y()
- Bgs[i].z()
-
两个相机与imu之间的平移和旋转
-
两个相机对应的外参的平移部分para_Ex_Pose [ i ] [ 0 1 2 ] [i][0\quad1\quad2] [i][012], 这里是相机到imu的平移ric
- tic[i].x
- tic[i].y
- tic[i].z
-
两个相机对应的外参的旋转部分para_Ex_Pose [ i ] [ 3 4 5 6 ] [i][3\quad4\quad5\quad6] [i][3456], 这里是相机到imu的旋转ric
- Quaterniond q{ric[i]}
- q.x
- q.y
- q.z
- q.w

-
所有特征点的逆深度para_Feature[i][0]
- dep[i], dep由getDepthVector函数拿到, 每个特征点对应一个逆深度,大小由特征点的个数决定
- dep[i], dep由getDepthVector函数拿到, 每个特征点对应一个逆深度,大小由特征点的个数决定
-
td
- 滑动窗口内第一帧图像到imu的时间差
- 滑动窗口内第一帧图像到imu的时间差
-
double2vector()
- 把优化完成的各项参数再恢复到现有的数据中,也就是从para…中取回优化完成的数据
- ric(2): camera → \to → imu的旋转矩阵
- tic(2): camera → \to → imu的平移矩阵
- Ps(11): 滑动窗口内各帧在世界坐标系下的位置
- Vs(11): 滑动窗口内各帧的速度
- Rs(11): 滑动窗口内各帧在世界坐标系下的旋转
- Bas(11): 滑动窗口内imu加速度计的偏置
- Bgs(11): 滑动窗口内imu陀螺仪的偏置
- td:滑动窗口内第一帧图像到imu的时间差
updateLatestStates()
- 更新滑窗里面的变量
- latest_time
- latest_P
- latest_Q
- latest_V
- latest_Ba
- latest_Bg
- latest_acc_0
- latest_gyr_0
- 使用fastPredictIMU()函数预测imu的P, V, Q
slideWindow()
- 滑窗会紧接着边缘化操作,通过上次边缘化是旧帧还是新帧进行滑窗
- 如果是边缘化旧帧,就会进入 slideWindowOld()函数
- 如果是边缘化新帧,则进入slideWindowNew()函数
feature_manager.cpp
addFeatureCheckParallax()
- 进行视差比较,返回true or false, 也就是视差是否大到需要边缘化旧的帧
- 参考博客
- 滑窗内的关键帧个数小于3
- 如果当前帧的Features在滑窗内被观测到的个数小于20
- 计算滑窗内所有满足条件的Feature(至少有三帧观测到该Feature)的观测帧倒数第二帧和导数第三帧的视差(归一化平面上的距离),如果最终的平均距离大于10个像素点
- 满足上面条件的Feature的个数为0的时候
getCorresponding()
- 得到两帧之间对应的特征点corres
CalibrationExRotation()
- 外参标定
- ric[0] = calib_ric;
- RIC[0] = calib_ric;
- 外参初始化
initFramePoseByPnP()
- 这个函数只有在frame_count不为0的时候才会生效
- PnP求解位姿函数
- 已知相机中特征点的像素坐标, 通过三角化得到这些像素坐标再空间中的位置,再通过2d-3d信息求解出当前帧也就是相机的位姿
- 该代码断分为两部分,前部分先判断当前特征中那些已经三角化出深度的点,计算出世界系坐标存入pts3D,相应的当前帧的归一化平面坐标存入pts2D,之后由外参转化出上一阵的相机位姿,然后进行solvePoseByPnP运算,求解当前帧的位姿,以便后面的三角化,当然要转化成imu坐标系下的位姿。solvePoseByPnP函数代码我就不贴在这里了,主要就是进行一系列的坐标系转化后,利用opencv自带的solvePnP函数解算位姿
triangulate()
- 三角化法求深度
triangulate(frame_count, Ps, Rs, tic, ric);
- frame_count: 代表滑动窗口内的第几帧
- Ps:滑动窗口内各帧在世界坐标系下的位置
- Rs:滑动窗口内各帧再世界坐标系下的旋转
- tic: 相机到imu的平移
- ric: 相机到imu的旋转
- 1 用Ps, Rs, tic, ric推导出左右两个相机的位姿,注意这里的坐标系是在imu坐标系下,所以位姿需要用imu的外参转一下
Eigen::Matrix<double, 3, 4> leftPose;
Eigen::Vector3d t0 = Ps[imu_i] + Rs[imu_i] * tic[0];
Eigen::Matrix3d R0 = Rs[imu_i] * ric[0];
leftPose.leftCols<3>() = R0.transpose();
leftPose.rightCols<1>() = -R0.transpose() * t0;
- 2 拿到归一化平面坐标
point0:归一化像素平面坐标$[u \quad v]$
point1:right同上
- 3 开始三角化,拿到世界坐标系的位置point3d
triangulatePoint(leftPose, rightPose, point0, point1, point3d)
- 4 相机位姿和相机坐标系之间存在一个求逆的过程,并且左右视图三角化这样求得的localPoint是在imu坐标系下的位置,还需要转化到左相机坐标系下,得到左相机坐标系下的深度。
Eigen::Vector3d localPoint;
localPoint = leftPose.leftCols<3>() * point3d + leftPose.rightCols<1>();
double depth = localPoint.z();
if (depth > 0)
it_per_id.estimated_depth = depth;
else
it_per_id.estimated_depth = INIT_DEPTH;
triangulatePoint()
- 函数通过三角化求解空间点坐标
- triangulatePoint(leftPose, rightPose, point0, point1, point3d)
- 两个相机的位姿是知道的,leftPose, rightPose
- 特征点在两个相机对应帧的图片里的归一化像素坐标也是知道的, point0, point1
- 通过对极几何和svd分解,求出这个特征点再空间中的3d坐标,也就是point3d
- VINS-mono 学习之 三角化
getDepthVector()
- 计算所有特征点的深度,逆深度
getFeatureCount()
int cnt = 0;
for (auto &it : feature)
{
it.used_num = it.feature_per_frame.size();
if (it.used_num >= 4)
{
cnt++;
}
}
return cnt;
initial_alignment.cpp
solveGyroscopeBias()
- 为了得到陀螺仪的偏置Bgs
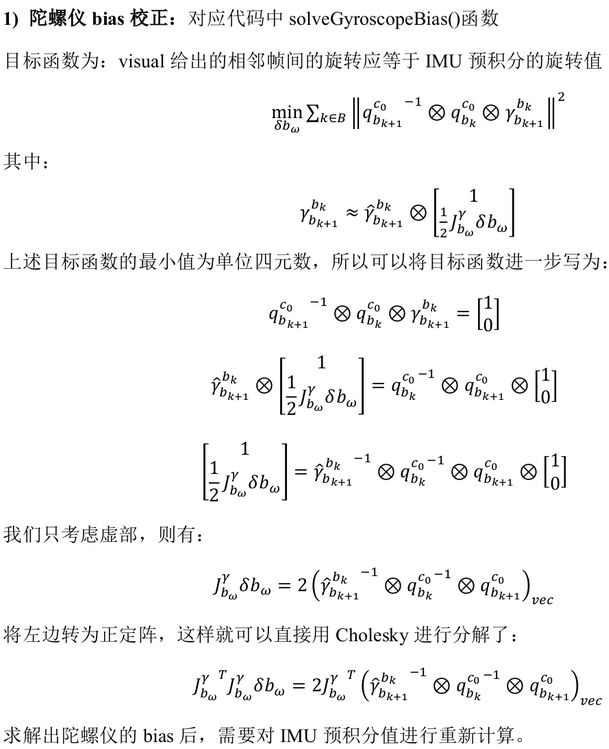
- VINS-Mono理论学习——视觉惯性联合初始化与外参标定
imu_factor.h
Evaluate()
virtual bool Evaluate(double const *const *parameters, double *residuals, double **jacobians) const
- imu factor的评价函数,优化参数parameters<7,9,7,9>:
- 定义并计算imu残差项residuals<15,1>, 进入到预计分的evaluate函数, 输入的是两帧之间的 P , V , Q , B a , B g P,V,Q,Ba, Bg P,V,Q,Ba,Bg, 输出的是残差residual
residual = pre_integration->evaluate(Pi, Qi, Vi, Bai, Bgi,
Pj, Qj, Vj, Baj, Bgj);
- 最终得到:
- 定义并计算一个信息矩阵sqrt_info<15, 15>, 这个信息矩阵是协方差矩阵的逆做LLT分解得到的
- 真正的优化项其实是马氏距离: d = r e s i d u a l T ∗ Σ − 1 ∗ r e s i d u a l d = residual^T*\Sigma^{-1}*residual d=residualT∗Σ−1∗residual, Σ \Sigma Σ是协方差
- Ceres 只接受最小二乘优化,也就是 m i n ( e T e ) min(e^{T}e) min(eTe), 所以把 Σ \Sigma Σ做 LLT 分解,即 Σ = L L T \Sigma = LL^{T} Σ=LLT
- 最终得到 d = r T L L T r = ( L T r ) T ( L T r ) d = r^{T}LL^{T}r=(L^Tr)^T(L^Tr) d=rTLLTr=(LTr)T(LTr), 所以真正去优化的残差项 r e s i d u a l ′ = L T r residual^{'}=L^{T}r residual′=LTr
Eigen::Matrix<double, 15, 15> sqrt_info = Eigen::LLT<Eigen::Matrix<double, 15, 15>>(pre_integration->covariance.inverse()).matrixL().transpose();
residual = sqrt_info * residual;
- 判断
- 要进行ceres自动求导还是手动求导
- 判断是否要对 J ( 0 ) , J ( 1 ) , J ( 2 ) , J ( 3 ) J(0), J(1),J(2),J(3) J(0),J(1),J(2),J(3)进行手动求导
if (jacobians)
{
...
if (jacobians[0])
{
...
}
if (jacobians[1])
{
...
}
if (jacobians[2])
{
...
}
if (jacobians[3])
{
...
}
}
- 进行手动求导,依然要先从jacobian矩阵中拿到各个增量的关于bias的雅克比
- 利用公式开始求导,这里其实是分别对i时刻的pose和speed以及j时刻的pose和speed求雅克比
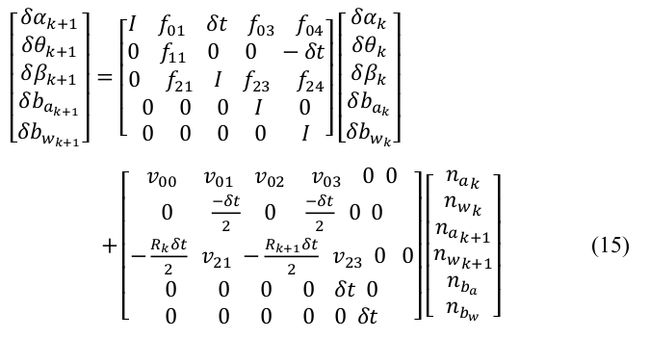
- 其实就是对15*1的residual矩阵的每一项求偏导,所以叫残差雅克比, 求偏导的顺序为:
- [ p b k w , q b k w ] [p_{b_k}^w, q_{b_k}^w] [pbkw,qbkw]
- [ v b k w , b a k , b w k ] [v_{b_k}^w, b_{a_k}, b_{w_k}] [vbkw,bak,bwk]
- [ p b k + 1 w , q b k + 1 w ] [p_{b_{k+1}}^w, q_{b_{k+1}}^w] [pbk+1w,qbk+1w]
- [ v b k + 1 w , b a k + 1 , b w k + 1 ] [v_{b_{k+1}}^w, b_{a_{k+1}}, b_{w_{k+1}}] [vbk+1w,bak+1,bwk+1]s
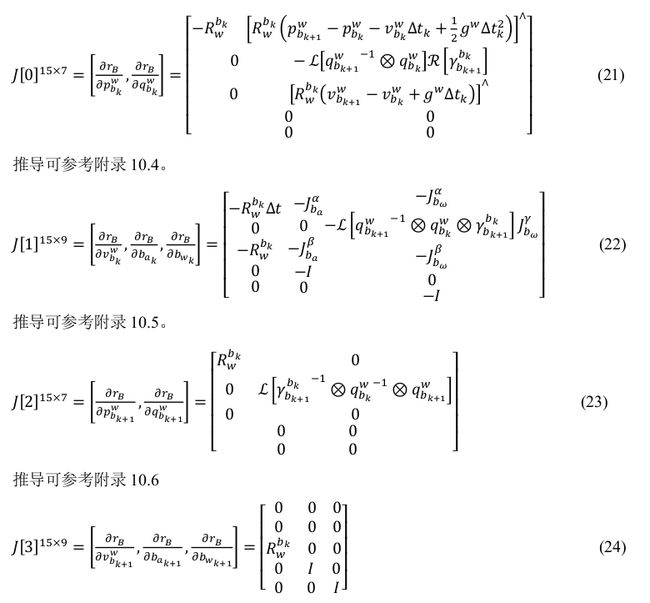
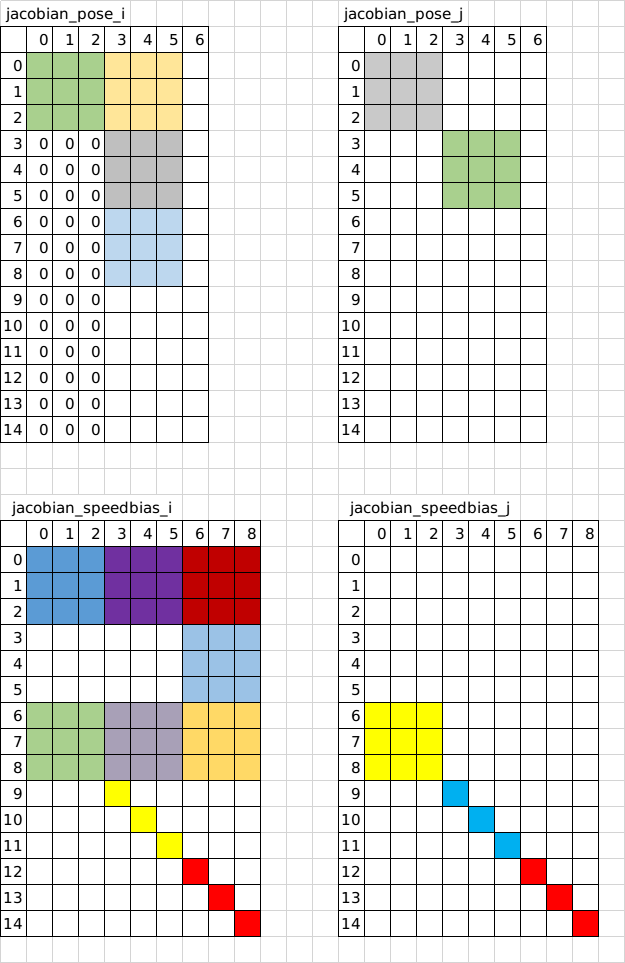
- 需要注意的是,由于要添加到ceres中,所以这里的每一个雅克比求出来都要再乘以信息矩阵sqrt_info
integration_base.h
evaluate()
- 两帧之间的 P V Q PVQ PVQ和 b i a s bias bias的变化量的差
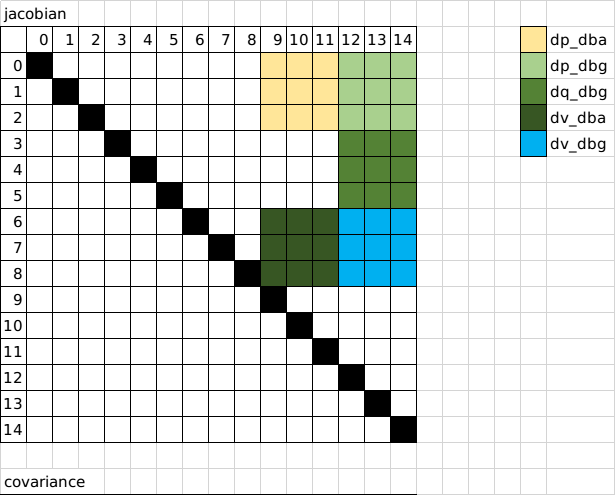
- 从jacobian矩阵中拿到各个增量关于bias的雅克比
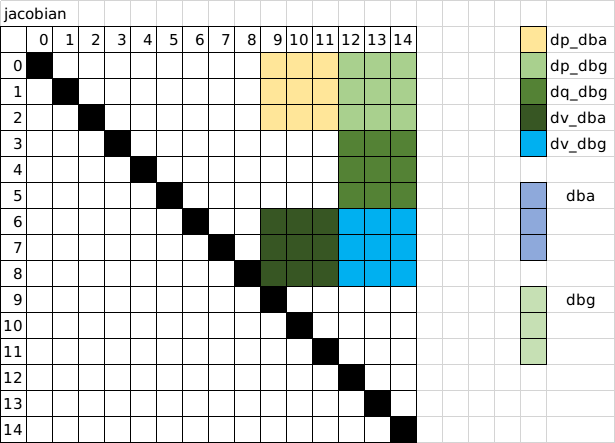
Eigen::Matrix3d dp_dba = jacobian.block<3, 3>(O_P, O_BA);
Eigen::Matrix3d dp_dbg = jacobian.block<3, 3>(O_P, O_BG);
Eigen::Matrix3d dq_dbg = jacobian.block<3, 3>(O_R, O_BG);
Eigen::Matrix3d dv_dba = jacobian.block<3, 3>(O_V, O_BA);
Eigen::Matrix3d dv_dbg = jacobian.block<3, 3>(O_V, O_BG);
- jacobian矩阵是通过迭代得到的 J k + 1 = F k J k J_{k+1} = F_k J_k Jk+1=FkJk
- 相减拿到当前帧的 δ b a \delta ba δba和 δ b g \delta bg δbg
- 计算三个参数 P V Q PVQ PVQ
- corrected_delta_q
- corrected_delta_v
- corrected_delta_p
Eigen::Quaterniond corrected_delta_q = delta_q * Utility::deltaQ(dq_dbg * dbg);
Eigen::Vector3d corrected_delta_v = delta_v + dv_dba * dba + dv_dbg * dbg;
Eigen::Vector3d corrected_delta_p = delta_p + dp_dba * dba + dp_dbg * dbg;
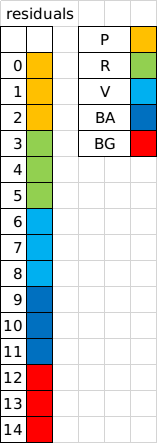
- 计算残差矩阵<15,1>residuals

- 代码和公式对应的参数:
- δ b a \delta b_a δba: dba
- δ b g \delta b_g δbg: dbg
- b a b k + 1 b_{a_{b_{k+1}}} babk+1: Baj
- b ω b k + 1 b_{\omega_{b_{k+1}}} bωbk+1: Bgj
- b a b k b_{a_{b_k}} babk: Bai
- b ω b k b_{\omega_{b_k}} bωbk: Bgi
- R W b k R_{W}^{b_k} RWbk: Qi.inverse()
- g w g^w gw: G
- Δ t k \Delta t_k Δtk: sum_dt
- p b k + 1 w p_{b_{k+1}}^{w} pbk+1w:Pj
- p b k w p_{b_k}^{w} pbkw:Pi
- v b k w v_{b_k}^w vbkw: Vi
- α b k + 1 b k \alpha_{b_{k+1}^{b_k}} αbk+1bk: corrected_delta_p
- r b k + 1 b k − 1 r_{b_{k+1}^{b_k}}^{-1} rbk+1bk−1: corrected_delta_q.inverse()
- q b k q_{b_k} qbk: Qi
- q b k + 1 q_{b_{k+1}} qbk+1: Qj
- v b k + 1 w v_{b_k+1}^{w} vbk+1w: Vj
- v b k w v_{b_k}^{w} vbkw: Vi
- β b k + 1 b k \beta_{b_{k+1}}^{b_k} βbk+1bk: corrected_delta_v
- corrected_delta_p也就是公式中的 α b k + 1 k \alpha_{b_{k+1}}^k αbk+1k,这里的计算用到了一阶泰勒展开
- α b k + 1 k = δ P i + J b i a P ∗ δ b i a + J b i g P ∗ δ b i g \alpha_{b_{k+1}}^k = \delta P_i +J_{b_i^a}^P*\delta b_i^a + J_{b_i^g}^P *\delta b_i^g αbk+1k=δPi+JbiaP∗δbia+JbigP∗δbig
- corrected_delta_v也就是公式中的 β b k + 1 b k \beta_{b_{k+1}}^{b_k} βbk+1bk,
- β b k + 1 b k = δ V i + J b i a V ∗ δ b i a + J b i g V ∗ δ b i g \beta_{b_{k+1}}^{b_k} = \delta V_i + J_{b_i^a}^V*\delta b_i^a + J_{b_i^g}^V *\delta b_i^g βbk+1bk=δVi+JbiaV∗δbia+JbigV∗δbig
- corrected_delta_q 是公式中的 r b k + 1 b k r_{b_{k+1}}^{b_k} rbk+1bk, 这里的r代表角度信息
- q b k + 1 b k = δ q i ⨂ [ 1 1 2 J b i q δ b i q ] q_{b_{k+1}}^{b_k} = \delta q_i \bigotimes\begin{bmatrix}1 \\ \frac{1}{2}J_{b_i}^q\delta b_i^q \\ \end{bmatrix} qbk+1bk=δqi⨂[121Jbiqδbiq]
- J b i a P = ∂ δ P ∂ δ b i a J_{b_i^a}^P = \frac{\partial \delta P}{\partial \delta b_i^a} JbiaP=∂δbia∂δP
- J b i g P = ∂ δ P ∂ δ b i g J_{b_i^g}^P = \frac{\partial \delta P}{\partial \delta b_i^g} JbigP=∂δbig∂δP
- J b i a V = ∂ δ V ∂ δ b i a J_{b_i^a}^V = \frac{\partial \delta V}{\partial \delta b_i^a} JbiaV=∂δbia∂δV
- J b i g V = ∂ δ V ∂ δ b i g J_{b_i^g}^V = \frac{\partial \delta V}{\partial \delta b_i^g} JbigV=∂δbig∂δV
- J b i g q = δ q b g ∂ b i g J_{b_i^g}^q = \frac{\delta q_b^g}{\partial b_i^g} Jbigq=∂bigδqbg
- 旋转和加速度没有什么关系,和陀螺仪才有关系
- 代码和公式对应的参数:
pose_local_parameterization.cpp
Plus()
ComputeJacobian()
GlobalSize()
- return 7
LocalSize()
- return 6
ProjectionTwoFrameOneCamFactor.cpp
- 构造函数里只是把i时刻和j时刻的速度值进行赋值
Evaluate()
- 待优化量赋值<7, 7, 7, 1, 1>
- 残差计算(取前两个元素)
residual = (pts_camera_j / dep_j).head<2>() - pts_j_td.head<2>();
residual = sqrt_info * residual;
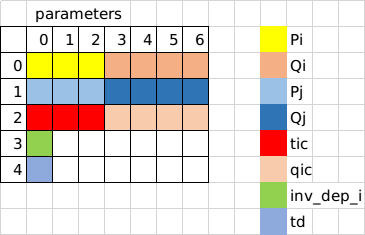
- 优化变量: [ p b i w , q b i w ] [p_{b_i}^w, q_{b_i}^w] [pbiw,qbiw], [ p b j w , q b j w ] [p_{b_j}^w, q_{b_j}^w] [pbjw,qbjw], [ p c b , q c b ] [p_c^b, q_c^b] [pcb,qcb], λ l \lambda_l λl, t d td td
- [ p b i w , q b i w ] [p_{b_i}^w, q_{b_i}^w] [pbiw,qbiw], [ p b j w , q b j w ] [p_{b_j}^w, q_{b_j}^w] [pbjw,qbjw]第i帧和第j帧的位姿
- [ p c b , q c b ] [p_c^b, q_c^b] [pcb,qcb] imu和相机的外参表示
- 第 l l l个特征点的逆深度 λ l \lambda_l λl
- 残差雅克比矩阵
- pts_i: P l c j ′ P_l^{c_j^{'}} Plcj′ 第 l l l个特征点在第i帧单位相机平面的投影
- pts_j: P l c j ′ P_l^{c_j^{'}} Plcj′ 第 l l l个特征点在第j帧单位相机平面的投影
-
pts_camera_i : P l c i ′ : P_l^{c_i^{'}} :Plci′ pts_i在第i帧的重投影 - pts_camera_j: P l c j ′ P_l^{c_j^{'}} Plcj′ pts_i在第j帧的重投影
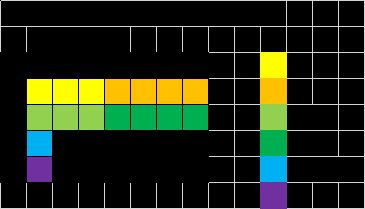
ProjectionTwoFrameTwoCamFactor.cpp
- 构造函数里把i时刻和j时刻的速度值进行赋值
- 是否使用球面误差
#ifdef UNIT_SPHERE_ERROR
...
#endif
Evaluate()
-
待优化量赋值<7, 7, 7,7, 1, 1>
-
这边会比2Frame1Cam中多出一个相机和imu的坐标变换
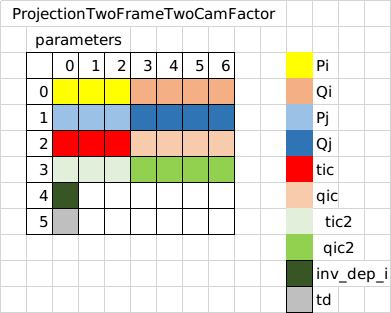
-
残差计算(取前两个元素)
-
雅克比矩阵
ProjectionOneFrameTwoCamFactor.cpp
Evaluate()
- 待优化量赋值<7, 7, 1, 1>
- 这边会比2Frame2Cam中少去了i,j时刻的位姿
- 残差计算
- 残差雅克比
marginalization_factor.cpp
- 对于MarginalizationInfo, 主要是完成边缘化操作, 这一系列函数包括addResidualBlockInfo(), preMarginalize(),marginalize
- 而MarginalizationFactor函数是使用ceres对边缘化残差进行优化(包括先验残差, imu残差, 视觉残差)
preMarginalize()
- factors是在addResidualBlockInfo()函数中添加的残差的容器
factors.emplace_back(residual_block_info)此时取出保存的残差 - Evaluate()计算所有状态变量构成的残差和雅克比矩阵
- addr拿到优化变量的地址
- 开辟新的一块内存空间进行数据关联
double *data = new double[size];
memcpy(data, it->parameter_blocks[i], sizeof(double) * size);
parameter_block_data[addr] = data;
marginalize()
- 边缘化操作函数,舒尔布边缘化,利用多线程进行计算
addResidualBlockInfo()
factors.emplace_back(residual_block_info);
std::vector<double *> ¶meter_blocks = residual_block_info->parameter_blocks;
std::vector<int> parameter_block_sizes = residual_block_info->cost_function->parameter_block_sizes();
for (int i = 0; i < static_cast<int>(residual_block_info->parameter_blocks.size()); i++)
{
double *addr = parameter_blocks[i];
int size = parameter_blocks.size();
//reinterpret_cast指针转换为整数,重新解释
parameter_block_sizes[reinterpret_cast<long>(addr)] = size;
}
for (int i = 0; i < static_cast<int>(residual_block_info->drop_set.size()); i++)
{
double *addr = parameter_blocks[residual_block_info->drop_set[i]];
parameter_block_idx[reinterpret_cast<long>(addr)] = 0;
}
- reinterpret_cast VS static_cast
- static_cast主要管:有继承关系类的指针和内置数据类型的转换(和C的内置类型转换规则一致,可能改变底层的位,也可能不改变)。
- reinterpret_cast主要管:所有指针(引用)之间的转换
- 在它们管理的交叉点处——有继承关系的指针的转换,处理方式有所不同。