CS131学习笔记(lecture7)
讲义地址:http://vision.stanford.edu/teaching/cs131_fall1718/files/07_DoG_SIFT.pdf
上节说到,Harris检测器对于尺度变换下的关键点检测效果不理想,所以本节将关注一些在尺度变换下依然可以有效检测的方法。
尺度不变检测
从直觉上,我们在进行不同尺度下的特征检测时,需要选取范围不同的窗函数(以下以圆圈为例),即:对比例尺较小的图像选取范围较小的窗函数;对比例尺较大的图像选取范围更大的窗函数。
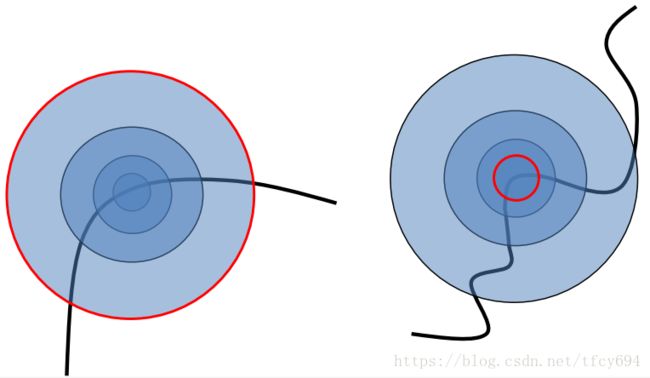
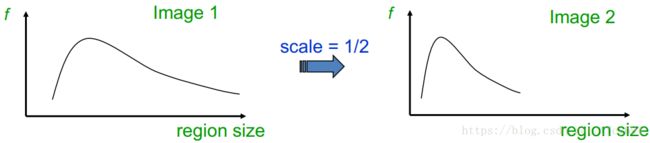
那么具体如何选定这些窗函数的范围呢?我们可以把每一个像素点周围的点的像素值作为范围(如半径)的函数,选取一个特征比较明显的点(如峰值),选取所对应的自变量就能在若干幅图中【独立】地确定窗函数的范围。当然了,这种“独立”也对图像的普适性作出了一定的牺牲。图像的像素函数需要满足:有且仅有一个峰值明显的点。这样才不会误导算法作出错误的选择。

以上思路在数学上表示为一个kernel函数和图像函数的卷积。

关于这个kernel的形式,一种是一个高斯拉普拉斯算子(Laplace of Gaussian,LoG)1: L = σ 2 ( G x x ( x , y , σ ) + G y y ( x , y , σ ) ) ) L=\sigma^2(G_{xx}(x,y,\sigma)+G_{yy}(x,y,\sigma))) L=σ2(Gxx(x,y,σ)+Gyy(x,y,σ)))
其数学原理是:对于图像 f f f,首先进行高斯平滑处理滤去噪点: G ( x , y , σ ) ∗ f ( x , y ) G(x,y,\sigma)*f(x,y) G(x,y,σ)∗f(x,y)然后对上式求得微分,进行边缘检测: d d x ( G ∗ f ) = d G d x ∗ f \dfrac{d}{dx}(G*f)=\dfrac{dG}{dx}*f dxd(G∗f)=dxdG∗f其中,二阶形式的微分 d G d x \dfrac{dG}{dx} dxdG即是拉普拉斯算子。
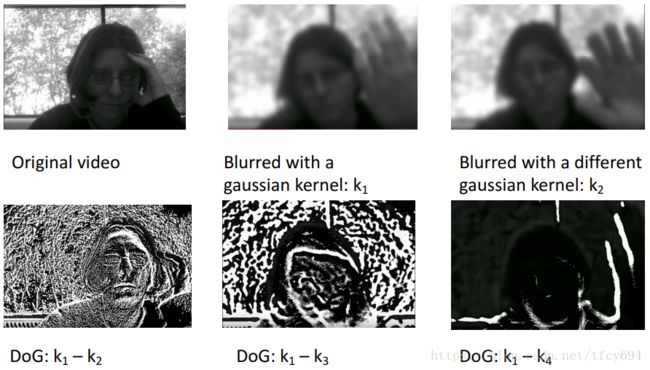
该算法相当有效,但是也要求了更高的计算复杂度。所以可以用一个高斯差分算子(Difference of Gaussians, DoG)2来近似LoG滤波器: D o G = G ( x , y , k σ ) − G ( x , y , σ ) DoG=G(x,y,k\sigma)-G(x,y,\sigma ) DoG=G(x,y,kσ)−G(x,y,σ)

本节中, G ( x , y , σ ) G(x,y,\sigma) G(x,y,σ)表示均值为1的高斯函数。
基于DoG算子,可以采用SIFT算法进行特征匹配。
高斯金字塔(octave)
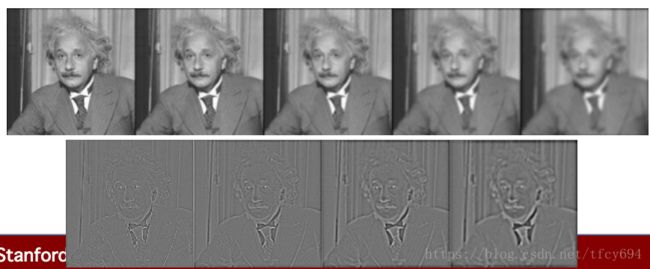
DoG中常对一幅图像分别以 σ \sigma σ, 2 σ 2\sigma 2σ, …, k σ k\sigma kσ做出 k k k个卷积结果,构成金字塔,然后对金字塔的不同层进行差分,即可获得差分金字塔。从而得到稳定的特征。差分金字塔的每一层都可以看做一个带通滤波器的响应(特定分辨率的图像减去一个模糊的低频图像),所以各层金字塔分别表征了图像在不同频率下的响应。可以在全图范围内根据DoG选取相应的兴趣点和窗函数范围。
尺度不变特征变换(Scale Invirant Feature Transform, SIFT)
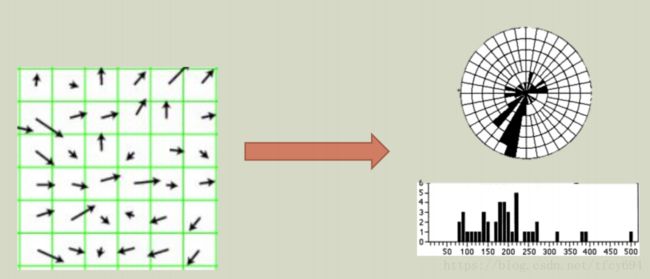
检测问题主要分为寻找关键点和匹配问题。前面我们都是使用Harris角检测器寻找角作为关键点,上面介绍了基于DoG的尺度不变检测算法,得到了一些keypoint和相应的独立的scaling范围。SIFT中的关键点匹配方法则是基于梯度方向直方图的。
算法:
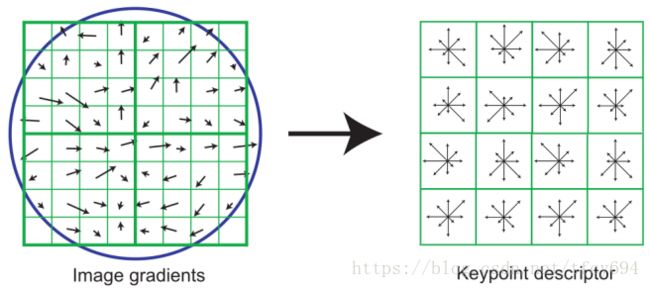
对于每一个keypoint,计算scaling范围中各点处的梯度,并减去待匹配keypoint的rotation角度,从而实现旋转不变。
将相应的scaling范围划分成4*4的方格,对每个方格中的像素点统计梯度并近似到8个方向,reshape成为128维的向量。
对于所有keypoints得到的向量,用欧氏距离进行匹配即可。
一些讨论:
由于以上过程是基于梯度的,所以整体的光照增强和减弱不影响匹配效果。
对比度会影响梯度的变化,此情况下要进行归一化处理。
另一种描述子:梯度方向直方图(Histogram of Oriented Gradients,HoG)
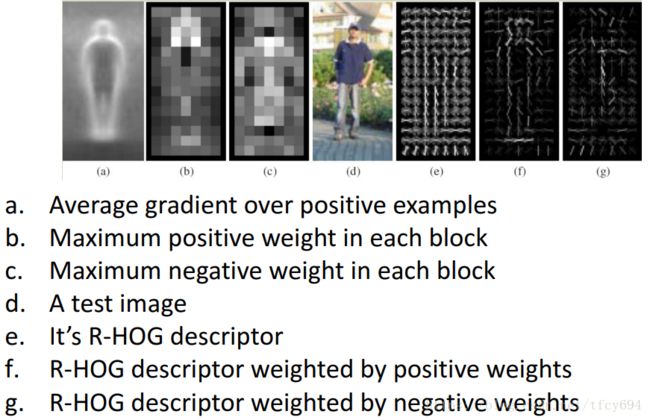
前面介绍了一些尺度可变和尺度不变的匹配算法,现在介绍一种作为SIFT的variant的、广泛用于人形识别的图像描述算法——HoG。
把全图划分成一系列(矩形或圆形)的空间区域(称为cell)
对于每个cell,统计所包含的像素点的近似梯度并建立直方图。
在包含若干个cells的更大范围(称为block)内进行normalize。
通过对原图进行以上处理,则可以根据不同的需要提取相应的不同的信息。如下:
HoG的一些缺点:
1.检测范围广。
2.慢。
3.当背景光照有差异时,识别效率不太高。
##全景拼接
全景拼接在lab中有详细的过程,此处仅对过程作简要介绍:
1.检测keypoint
2.(利用RANSAC)建立并匹配descriptor
3.根据匹配结果建立仿射变换、
http://ieeexplore.ieee.org/document/937561/ (没错,我们总算进入21世纪了) ↩︎
https://dl.acm.org/citation.cfm?id=996342 ↩︎