linux_module机制
linux 内核版本: 5.3.8
个人博客: https://www.letcos.top/
1.模块相关指令
1.1 指令介绍
1.1.1 modinfo
功能:静态查看模块文件的基本信息,不需要安装到内核中即可查看。
语法:modinfo 模块名
测试:
[root@localhost char]# modinfo tiny4412_hello_module.ko
filename: tiny4412_hello_module.ko
license: GPL
depends:
intree: Y
vermagic: 3.5.0-FriendlyARM SMP preempt mod_unload ARMv7 p2v8
modinfo 命令依赖 /lib/modules/内核版本号/modules.dep 文件,如果没有会执行失败,在开发板上执行这个命令时候就需要创建这个文件
1.1.2 lsmod
功能:查看已经安装到内核的模块列表信息
语法:lsmod
//先安装一个内核模块,再查看当前安装的模块数量
[root@localhost home]# insmod tiny4412_hello_module.ko
[ 1046.285000] Hello, Tiny4412 module is installed !
[root@localhost home]# lsmod
Not tainted
tiny4412_hello_module 648 0 - Live 0xbf000000 //安装的模块
//卸载模块,再次查看当前模块信息
[root@localhost home]# rmmod tiny4412_hello_module.ko
[ 1063.180000] Good-bye, Tiny4412 module was removed!
[root@localhost home]# lsmod
Not tainted
1.1.3 insmod
功能:安装一个模块文件到Linux系统中。
语法:insmod 内核模块名.ko
1.1.4 rmmod
功能:从内核中卸载一个已经安装的内核模块。
语法:rmod 内核模块名.ko
1.1.5 modprobe
功能:从内核安装或卸载一个模块
语法:参考 man modprobe
1.2 系统模块调用
1.2.1 初始化模块 init_module
SYSCALL_DEFINE3(init_module, void __user *, umod,
unsigned long, len, const char __user *, uargs)
{
int err;
struct load_info info = { };
//判断权限及是否启用模块功能
err = may_init_module();
if (err) if (mod->init != NULL)
ret = do_one_initcall(mod->init);
return err;
pr_debug("init_module: umod=%p, len=%lu, uargs=%p\n",
umod, len, uargs);
//从用户空间拷贝模块到内核
err = copy_module_from_user(umod, len, &info);
if (err)
return err;
//检查,校验,分配空间,加载,连接模块等操作
return load_module(&info, uargs, 0);
}
load_module
---->do_init_module(struct module *mod)
{
...
/*执行初始化函数*/
if (mod->init != NULL)
ret = do_one_initcall(mod->init);
...
}
1.2.2 删除模块 delete_module
SYSCALL_DEFINE2(delete_module, const char __user *, name_user,
unsigned int, flags)
{
struct module *mod;
char name[MODULE_NAME_LEN];
int ret, forced = 0;
if (!capable(CAP_SYS_MODULE) || modules_disabled)
return -EPERM;
//从用户空间获取模块名
if (strncpy_from_user(name, name_user, MODULE_NAME_LEN-1) < 0)
return -EFAULT;
name[MODULE_NAME_LEN-1] = '\0';
audit_log_kern_module(name);
if (mutex_lock_interruptible(&module_mutex) != 0)
return -EINTR;
//根据模块名查找模块
mod = find_module(name);
if (!mod) {
ret = -ENOENT;
goto out;
}
if (!list_empty(&mod->source_list)) {
/* Other modules depend on us: get rid of them first. */
ret = -EWOULDBLOCK;
goto out;
}
/* Doing init or already dying? */
if (mod->state != MODULE_STATE_LIVE) {
/* FIXME: if (force), slam module count damn the torpedoes */
pr_debug("%s already dying\n", mod->name);
ret = -EBUSY;
goto out;
}
/* If it has an init func, it must have an exit func to unload */
if (mod->init && !mod->exit) {
forced = try_force_unload(flags);
if (!forced) {
/* This module can't be removed */
ret = -EBUSY;
goto out;
}
}
/* Stop the machine so refcounts can't move and disable module. */
ret = try_stop_module(mod, flags, &forced);
if (ret != 0)
goto out;
mutex_unlock(&module_mutex);
/* Final destruction now no one is using it. */
/*执行退出函数*/
if (mod->exit != NULL)
mod->exit();
blocking_notifier_call_chain(&module_notify_list,
MODULE_STATE_GOING, mod);
klp_module_going(mod);
ftrace_release_mod(mod);
async_synchronize_full();
/* Store the name of the last unloaded module for diagnostic purposes */
strlcpy(last_unloaded_module, mod->name, sizeof(last_unloaded_module));
free_module(mod);
return 0;
out:
mutex_unlock(&module_mutex);
return ret;
}
1.2.3 从文件加载模块finish_module
SYSCALL_DEFINE3(finit_module, int, fd, const char __user *, uargs, int, flags)
{
struct load_info info = { };
loff_t size;
void *hdr;
int err;
err = may_init_module();
if (err)
return err;
pr_debug("finit_module: fd=%d, uargs=%p, flags=%i\n", fd, uargs, flags);
if (flags & ~(MODULE_INIT_IGNORE_MODVERSIONS
|MODULE_INIT_IGNORE_VERMAGIC))
return -EINVAL;
err = kernel_read_file_from_fd(fd, &hdr, &size, INT_MAX,
READING_MODULE);
if (err)
return err;
info.hdr = hdr;
info.len = size;
//检查,校验,分配空间,加载,连接模块等操作
return load_module(&info, uargs, flags);
}
2. 模块编程
2.1 相关函数(宏)
2.1.1 module_init(x)
//以usb_init为例
/**
* module_init() - driver initialization entry point
* @x: function to be run at kernel boot time or module insertion
*
* module_init() will either be called during do_initcalls() (if
* builtin) or at module insertion time (if a module). There can only
* be one per module.
*/
#define module_init(x) __initcall(x);
#define __initcall(fn) device_initcall(fn)
#define device_initcall(fn) __define_initcall(fn, 6)
#define __define_initcall(fn, id) ___define_initcall(fn, id, .initcall##id)
#define ___define_initcall(fn, id, __sec) \
static initcall_t __initcall_##fn##id __used \
__attribute__((__section__(#__sec ".init"))) = fn;
//可扩展宏
#define ___define_initcall(fn,id,__sec) \
static initcall_t __initcall_usb_init_6 __attribute__((__used__)) __attribute__((__section__( ".initcall6"".init"))) = usb_init;
驱动初始化的入口,参数x就是在内核启动或者插入一个模块时会调用的函数.每个模块只能有一个module_init(x).
将usb_init函数指针赋值给__initcall_usb_init_6,将该函数指针静态(used)的放到.initcall6.init输入段(section)
typedef int (*initcall_t)(void);
typedef initcall_t initcall_entry_t;
2.1.2 module_exit(x)
/**
* module_exit() - driver exit entry point
* @x: function to be run when driver is removed
*
* module_exit() will wrap the driver clean-up code
* with cleanup_module() when used with rmmod when
* the driver is a module. If the driver is statically
* compiled into the kernel, module_exit() has no effect.
* There can only be one per module.
*/
#define module_exit(x) __exitcall(x);
#define __exitcall(fn) \
/*
static exitcall_t __exitcall_usb_exit __used __section(.exitcall.exit)=usb_exit
*/
static exitcall_t __exitcall_##fn __exit_call = fn
typedef void (*exitcall_t)(void);
#define __exit_call __used __section(.exitcall.exit)
驱动退出入口,参数X就是驱动被移除的时候运行的函数。当驱动作为一个模块插入函数的时候,moduleexit(x)会包含驱动清理代码(释放资源工作);当模块被静态编译到内核的时候,这个函数不起作用。每个模块也只有一个moduleexit(x);
将exit_exit函数指针赋值给静态变量__exitcall_usb_exit,并将其静态的放入到.exitcall.exit输入段
2.1.3 MODULE_INFO(tag,info)
示例:license 宏
/*
* The following license idents are currently accepted as indicating free
* software modules
*
* "GPL" [GNU Public License v2]
* "GPL v2" [GNU Public License v2]
* "GPL and additional rights" [GNU Public License v2 rights and more]
* "Dual BSD/GPL" [GNU Public License v2
* or BSD license choice]
* "Dual MIT/GPL" [GNU Public License v2
* or MIT license choice]
* "Dual MPL/GPL" [GNU Public License v2
* or Mozilla license choice]
*
* The following other idents are available
*
* "Proprietary" [Non free products]
*
* Both "GPL v2" and "GPL" (the latter also in dual licensed strings) are
* merely stating that the module is licensed under the GPL v2, but are not
* telling whether "GPL v2 only" or "GPL v2 or later". The reason why there
* are two variants is a historic and failed attempt to convey more
* information in the MODULE_LICENSE string. For module loading the
* "only/or later" distinction is completely irrelevant and does neither
* replace the proper license identifiers in the corresponding source file
* nor amends them in any way. The sole purpose is to make the
* 'Proprietary' flagging work and to refuse to bind symbols which are
* exported with EXPORT_SYMBOL_GPL when a non free module is loaded.
*
* In the same way "BSD" is not a clear license information. It merely
* states, that the module is licensed under one of the compatible BSD
* license variants. The detailed and correct license information is again
* to be found in the corresponding source files.
*
* There are dual licensed components, but when running with Linux it is the
* GPL that is relevant so this is a non issue. Similarly LGPL linked with GPL
* is a GPL combined work.
*
* This exists for several reasons
* 1. So modinfo can show license info for users wanting to vet their setup
* is free
* 2. So the community can ignore bug reports including proprietary modules
* 3. So vendors can do likewise based on their own policies
*/
#define MODULE_LICENSE(_license) MODULE_INFO(license, _license) //"GPL"
将license = “GPL”字符串放到__UNIQUE_ID_GPL0常量字符串数组中,然后将这个数组以1字节对齐(aligned(1))放到.modinfo段
/* Generic info of form tag = "info" */
#define MODULE_INFO(tag, info) __MODULE_INFO(tag, tag, info)
#define __MODULE_INFO(tag, name, info) \
static const char __UNIQUE_ID(name)[] \
__used __attribute__((section(".modinfo"), unused, aligned(1))) \
= __MODULE_INFO_PREFIX __stringify(tag) "=" info
/*
*static const char __UNIQUE_ID_GPL0[] = "license=GPL"
*/
2.1.3.1 生成唯一的变量名
#define __UNIQUE_ID(prefix) __PASTE(__PASTE(__UNIQUE_ID_, prefix), __COUNTER__)
#define ___PASTE(a,b) a##b
#define __PASTE(a,b) ___PASTE(a,b)
/*
*This macro expands to sequential integral values starting from 0. In conjunction with the *## operator, this provides a convenient means to generate unique identifiers.
*__COUNTER__会被展开为一个从0开始的整数,且每次调用后其值都会加一,这也就保证了其唯一性。
*/
__COUNTER__
__UNIQUE_ID("GPL") __UNIQUE_ID_GPL0 //假设第一次使用__COUNTER__宏
2.1.3.2 字符串化
/* Indirect stringification. Doing two levels allows the parameter to be a
* macro itself. For example, compile with -DFOO=bar, __stringify(FOO)
* converts to "bar".
*/
//字符串化,它的功能就是把参数x转换成一个字符串
#define __stringify_1(x...) #x
#define __stringify(x...) __stringify_1(x)
/*
*这样写有什么好处呢?为什么不直接写成 #define __stringify(x) #x 这个形式呢?
*
*打个比方,如果有这样一个定义
*
*#define FOO bar
*
*那么如果是情况二的话,则会这样翻译
*
*__stringify(FOO)
*->FOO
*
*如果是情况一呢,就会这样翻译
*
*__stringify(FOO)
*->__stringify_1(bar)
*->bar
*
*所以,这样定义的话,这个函数的使用,就可以使用表达式了,符合一般函数的调用习惯
*/
2.1.3.3 相关属性
//aligned (alignment)
指定变量或结构域的起始地址对齐(以字节为单位)
aligned(1) //1字节对齐
//used
1、这个函数属性通知编译器在目标文件中保留一个静态函数,即使它没有被引用。
2、标记为attribute__((used))的函数被标记在目标文件中,以避免链接器删除未使用的节。
3、静态变量也可以标记为used,方法是使用 __attribute__((used))。
4、例程
static int lose_this(int);
static int keep_this(int) __attribute__((used)); // retained in object file
static int keep_this_too(int) __attribute__((used)); // retained in object file
//unused
表示该函数或变量可能不使用,这个属性可以避免编译器产生警告信息。
//gcc 手册
unused:This attribute, attached to a function, means that the function is meant to be
possibly unused. GCC will not produce a warning for this function.
===============================================================================
used: This attribute, attached to a function, means that code must be emitted for the
function even if it appears that the function is not referenced. This is useful,
for example, when the function is referenced only in inline assembly.
2.1.4 module_param(name,type,perm)
/**
* module_param - typesafe helper for a module/cmdline parameter
* @value: the variable to alter, and exposed parameter name.
* @type: the type of the parameter
* @perm: visibility in sysfs.
*
* @value becomes the module parameter, or (prefixed by KBUILD_MODNAME and a
* ".") the kernel commandline parameter. Note that - is changed to _, so
* the user can use "foo-bar=1" even for variable "foo_bar".
*
* @perm is 0 if the the variable is not to appear in sysfs, or 0444
* for world-readable, 0644 for root-writable, etc. Note that if it
* is writable, you may need to use kernel_param_lock() around
* accesses (esp. charp, which can be kfreed when it changes).
*
* The @type is simply pasted to refer to a param_ops_##type and a
* param_check_##type: for convenience many standard types are provided but
* you can create your own by defining those variables.
*
* Standard types are:
* byte, short, ushort, int, uint, long, ulong
* charp: a character pointer
* bool: a bool, values 0/1, y/n, Y/N.
* invbool: the above, only sense-reversed (N = true).
*/
module_param(nousb, bool, 0444);
#define module_param(name, type, perm) \
module_param_named(name, name, type, perm)
2.1.4.1 module_param_named(name,name,type,perm)
/**
* module_param_named - typesafe helper for a renamed module/cmdline parameter
* @name: a valid C identifier which is the parameter name.
* @value: the actual lvalue to alter.
* @type: the type of the parameter
* @perm: visibility in sysfs.
*
* Usually it's a good idea to have variable names and user-exposed names the
* same, but that's harder if the variable must be non-static or is inside a
* structure. This allows exposure under a different name.
*/
#define module_param_named(name, value, type, perm) \
param_check_##type(name, &(value)); \
module_param_cb(name, ¶m_ops_##type, &value, perm); \
__MODULE_PARM_TYPE(name, #type)
2.1.4.2 类型检查
param_check_##type(name, &(value));
-->param_check_bool(nousb,&bool);
#define param_check_bool(name, p) __param_check(name, p, bool)
--> __param_check(nousb,&bool,bool)
/* The macros to do compile-time type checking stolen from Jakub
Jelinek, who IIRC came up with this idea for the 2.4 module init code. */
#define __param_check(name, p, type) \
static inline type __always_unused *__check_##name(void) { return(p); }
-->static inline bool __always_unused * __check_nousb(void) {return(&bool);}
#define __always_unused __attribute__((__unused__))
2.1.4.3 回调函数
module_param_cb(name, ¶m_ops_##type, &value, perm);
-->module_param_cb(nousb,¶m_ops_bool,&nousb,0444);
/**
* module_param_cb - general callback for a module/cmdline parameter
* @name: a valid C identifier which is the parameter name.
* @ops: the set & get operations for this parameter.
* @perm: visibility in sysfs.
*
* The ops can have NULL set or get functions.
*/
#define module_param_cb(name, ops, arg, perm) \
__module_param_call(MODULE_PARAM_PREFIX, name, ops, arg, perm, -1, 0)
-->__module_param_call(NULL,nousb,¶m_ops_bool,&nousb,0444,-1,0)
/* This is the fundamental function for registering boot/module
parameters. */
#define __module_param_call(prefix, name, ops, arg, perm, level, flags) \
/* Default value instead of permissions? */ \
static const char __param_str_##name[] = prefix #name; \
static struct kernel_param __moduleparam_const __param_##name \
__used \
__attribute__ ((unused,__section__ ("__param"),aligned(sizeof(void *)))) \
= { __param_str_##name, THIS_MODULE, ops, \
VERIFY_OCTAL_PERMISSIONS(perm), level, flags, { arg } }
/*
*static const char __param_str_nousb[] = "nousb";
*static struct kernel_param const __param_nousb __uesd __attribute__ ((unused,__section__ *("__param"),aligned(sizeof(void *)))) =
*{
* __param_str_nousb,
* THIS_MODULE,
* ¶m_ops_bool,
* perm,
* -1,
* 0,
* &nousb
*}
*/
//当前模块的module结构体指针
extern struct module __this_module;
#define THIS_MODULE (&__this_module)
/* Permissions on a sysfs file: you didn't miss the 0 prefix did you? */
#define VERIFY_OCTAL_PERMISSIONS(perms) \
(BUILD_BUG_ON_ZERO((perms) < 0) + \
BUILD_BUG_ON_ZERO((perms) > 0777) + \
/* USER_READABLE >= GROUP_READABLE >= OTHER_READABLE */ \
BUILD_BUG_ON_ZERO((((perms) >> 6) & 4) < (((perms) >> 3) & 4)) + \
BUILD_BUG_ON_ZERO((((perms) >> 3) & 4) < ((perms) & 4)) + \
/* USER_WRITABLE >= GROUP_WRITABLE */ \
BUILD_BUG_ON_ZERO((((perms) >> 6) & 2) < (((perms) >> 3) & 2)) + \
/* OTHER_WRITABLE? Generally considered a bad idea. */ \
BUILD_BUG_ON_ZERO((perms) & 2) + \
(perms))
/*
* Force a compilation error if condition is true, but also produce a
* result (of value 0 and type size_t), so the expression can be used
* e.g. in a structure initializer (or where-ever else comma expressions
* aren't permitted).
*强制条件检查,只有e=0/false ,编译才会成功
*/
#define BUILD_BUG_ON_ZERO(e) (sizeof(struct { int:(-!!(e)); }))
2.1.4.4 相关结构体
- kernel_param结构体
struct kernel_param {
const char *name;
struct module *mod;
const struct kernel_param_ops *ops;
const u16 perm;
s8 level;
u8 flags;
union {
void *arg;
const struct kparam_string *str;
const struct kparam_array *arr;
};
};
//内核参数成员函数
struct kernel_param_ops {
/* How the ops should behave */
unsigned int flags;
/* Returns 0, or -errno. arg is in kp->arg. */
int (*set)(const char *val, const struct kernel_param *kp);
/* Returns length written or -errno. Buffer is 4k (ie. be short!) */
int (*get)(char *buffer, const struct kernel_param *kp);
/* Optional function to free kp->arg when module unloaded. */
void (*free)(void *arg);
};
/* Special one for strings we want to copy into */
struct kparam_string {
unsigned int maxlen;
char *string;
};
/* Special one for arrays */
struct kparam_array
{
unsigned int max;
unsigned int elemsize;
unsigned int *num;
const struct kernel_param_ops *ops;
void *elem;
};
- module 结构体
struct module {
enum module_state state;
/* Member of list of modules */
struct list_head list;
/* Unique handle for this module */
char name[MODULE_NAME_LEN];
/* Sysfs stuff. */
struct module_kobject mkobj;
struct module_attribute *modinfo_attrs;
const char *version;
const char *srcversion;
struct kobject *holders_dir;
/* Exported symbols */
const struct kernel_symbol *syms;
const s32 *crcs;
unsigned int num_syms;
/* Kernel parameters. */
#ifdef CONFIG_SYSFS
struct mutex param_lock;
#endif
struct kernel_param *kp;
unsigned int num_kp;
/* GPL-only exported symbols. */
unsigned int num_gpl_syms;
const struct kernel_symbol *gpl_syms;
const s32 *gpl_crcs;
#ifdef CONFIG_UNUSED_SYMBOLS
/* unused exported symbols. */
const struct kernel_symbol *unused_syms;
const s32 *unused_crcs;
unsigned int num_unused_syms;
/* GPL-only, unused exported symbols. */
unsigned int num_unused_gpl_syms;
const struct kernel_symbol *unused_gpl_syms;
const s32 *unused_gpl_crcs;
#endif
#ifdef CONFIG_MODULE_SIG
/* Signature was verified. */
bool sig_ok;
#endif
bool async_probe_requested;
/* symbols that will be GPL-only in the near future. */
const struct kernel_symbol *gpl_future_syms;
const s32 *gpl_future_crcs;
unsigned int num_gpl_future_syms;
/* Exception table */
unsigned int num_exentries;
struct exception_table_entry *extable;
/* Startup function. */
int (*init)(void);
/* Core layout: rbtree is accessed frequently, so keep together. */
struct module_layout core_layout __module_layout_align;
struct module_layout init_layout;
/* Arch-specific module values */
struct mod_arch_specific arch;
unsigned long taints; /* same bits as kernel:taint_flags */
#ifdef CONFIG_GENERIC_BUG
/* Support for BUG */
unsigned num_bugs;
struct list_head bug_list;
struct bug_entry *bug_table;
#endif
#ifdef CONFIG_KALLSYMS
/* Protected by RCU and/or module_mutex: use rcu_dereference() */
struct mod_kallsyms *kallsyms;
struct mod_kallsyms core_kallsyms;
/* Section attributes */
struct module_sect_attrs *sect_attrs;
/* Notes attributes */
struct module_notes_attrs *notes_attrs;
#endif
/* The command line arguments (may be mangled). People like
keeping pointers to this stuff */
char *args;
#ifdef CONFIG_SMP
/* Per-cpu data. */
void __percpu *percpu;
unsigned int percpu_size;
#endif
#ifdef CONFIG_TRACEPOINTS
unsigned int num_tracepoints;
tracepoint_ptr_t *tracepoints_ptrs;
#endif
#ifdef CONFIG_TREE_SRCU
unsigned int num_srcu_structs;
struct srcu_struct **srcu_struct_ptrs;
#endif
#ifdef CONFIG_BPF_EVENTS
unsigned int num_bpf_raw_events;
struct bpf_raw_event_map *bpf_raw_events;
#endif
#ifdef CONFIG_JUMP_LABEL
struct jump_entry *jump_entries;
unsigned int num_jump_entries;
#endif
#ifdef CONFIG_TRACING
unsigned int num_trace_bprintk_fmt;
const char **trace_bprintk_fmt_start;
#endif
#ifdef CONFIG_EVENT_TRACING
struct trace_event_call **trace_events;
unsigned int num_trace_events;
struct trace_eval_map **trace_evals;
unsigned int num_trace_evals;
#endif
#ifdef CONFIG_FTRACE_MCOUNT_RECORD
unsigned int num_ftrace_callsites;
unsigned long *ftrace_callsites;
#endif
#ifdef CONFIG_LIVEPATCH
bool klp; /* Is this a livepatch module? */
bool klp_alive;
/* Elf information */
struct klp_modinfo *klp_info;
#endif
#ifdef CONFIG_MODULE_UNLOAD
/* What modules depend on me? */
struct list_head source_list;
/* What modules do I depend on? */
struct list_head target_list;
/* Destruction function. */
void (*exit)(void);
atomic_t refcnt;
#endif
#ifdef CONFIG_CONSTRUCTORS
/* Constructor functions. */
ctor_fn_t *ctors;
unsigned int num_ctors;
#endif
#ifdef CONFIG_FUNCTION_ERROR_INJECTION
struct error_injection_entry *ei_funcs;
unsigned int num_ei_funcs;
#endif
}____cacheline_aligned __randomize_layout;
2.1.4.5 参数类型信息
// __MODULE_PARM_TYPE(nousb,bool)
#define __MODULE_PARM_TYPE(name, _type) \
__MODULE_INFO(parmtype, name##type, #name ":" _type)
--->__MODULE_INFO(parmtype,nametype,"nousb:bool")
--->static const char __UNIQUE_ID_nametype1[] = "parmtype=nousb:bool" //假设counter=1
2.2 模块编程
2.2.1 模块组成
• 头文件
#include
#include
• 模块函数
module_init()
module_exit()
• 模块许可
MODULE_LICENSE(“Dual BSD/GPL”);
MODULE_LICENSE(“GPL”);
MODULE_LICENSE(“BSD/GPL”);
• 模块描述
MODULE_AUTHOR(author);
MODULE_DESCRIPTION(description);
MODULE_VERSION(version_string);
• 模块导出符号(可以给其他模块调用)
EXPORT_SYMBOL( )
EXPORT_SYMBOL_GPL( )
• 模块参数
普通变量传递参数变量:
module_param(name, type, perm);
其中,name:表示参数的变量名字;
type:表示参数的变量类型;
perm:表示参数的访问权限;
数组类型模块参数的定义:
用逗号间隔的列表提供的值;
声明一个数组参数:
module_param_array(name, type, num, perm);
其中,name:表示数组的名字;
type:表示数组元素的类型;
num :存放传入参数元素数量,使用时候这里要写一个变量的地址。
perm:表示参数的访问权限;
======================================================
type支持的基本类型有:
bool :布尔类型 真--非0
invbool :颠倒了值的bool类型;
charp :字符指针类型,内存为用户提供的字符串分配;(char *)
int :整型
long :长整型
short :短整型
uint :无符号整型(unsigned int)
ulong :无符号长整型(unsigned long)
ushort :无符号短整型(unsigned short)
=========================================================
perm表示该参数在sysfs文件系统中所对应的文件节点的属性;你用该使用中定义的权限值;这个值控制谁可以存取这些模块参数在sysfs文件系统中的表示;当perm为0时,表示此参数不存在sysfs文件系统下对应的文件节点;否则,模块被加载后,会出现 /sys/module/模块名/parameters/参数名 这类文件 ,带有给定的权限,比如:
\#define S_IRWXU 00700
\#define S_IRUSR 00400
\#define S_IWUSR 00200
\#define S_IXUSR 00100
\#define S_IRWXG 00070
\#define S_IRGRP 00040
\#define S_IWGRP 00020
\#define S_IXGRP 00010
\#define S_IRWXO 00007
\#define S_IROTH 00004
\#define S_IWOTH 00002
\#define S_IXOTH 00001
2.2.2 示例代码
#include 测试过程:
//使用默认参数安装模块
[root@localhost home]# insmod par.ko
[ 6395.815000] arg=25
[ 6395.815000] arr:1 2 3 4 5 6 7 8 9 10
//查看参数节点属性和对应值
[root@localhost home]# ls /sys/module/par/parameters/
age arr
[root@localhost home]# ls /sys/module/par/parameters/ -l
total 0
-rw-r--r-- 1 root root 4096 Jan 1 19:57 age
-r--r--r-- 1 root root 4096 Jan 1 19:57 arr
[root@localhost home]# cat /sys/module/par/parameters/age
25
//修改参数值
[root@localhost home]# echo 23 > /sys/module/par/parameters/age
[root@localhost home]# cat /sys/module/par/parameters/age
23
[root@localhost home]# cat /sys/module/par/parameters/arr
//卸载模块
[root@localhost home]# rmmod par.ko
//带参数安装模块
[root@localhost home]# insmod par.ko age=78 arr=12,13,14,15,16
[ 6517.860000] arg=78
[ 6517.860000] arr:12 13 14 15 16 6 7 8 9 10
[root@localhost home]# ls /sys/module/par/parameters/ -l
total 0
-rw-r--r-- 1 root root 4096 Jan 1 19:59 age
-r--r--r-- 1 root root 4096 Jan 1 19:59 arr
[root@localhost home]# cat /sys/module/par/parameters/age
78
[root@localhost home]# echo 23 > /sys/module/par/parameters/age
[root@localhost home]# cat /sys/module/par/parameters/age
23
[root@localhost home]# cat /sys/module/par/parameters/arr
12,13,14,15,16
[root@localhost home]#
2.3 编译模块
2.3.1 单独编译模块
#shell
SHELL := /bin/zsh
#module name
NAME="touch_sensor"
obj-m += $(NAME).o
#kernel source path
KDIR=~/kernel
#rootfs path
RDIR=~/rootfs/home
modules:
@make -C $(KDIR) M=$(PWD) modules
@rm -rf .tmp_versions .*.ko.cmd .*.o.cmd modules.order Module.symvers *.mod.c *.o
#if you can use adb ,push to target board
adb root
sleep 2
adb push $(NAME).ko data
adb shell
#if you cna use nfs,push to rootfs
cp $(NAME).ko $(RDIR)
clean:
@rm -rf *.ko
2.3.2 多文件模块编译
当一个很复杂的设备驱动,一般可以把它多个c文件实现,但是最终编译出来只有一个ko文件。多个C文件中只能有一个文件是模块形式编写的,其他的C文件都普通C代码形式实现。
建议不管是单文件单模块或多文件单模块都使用这个Makefile写法。下面是图示

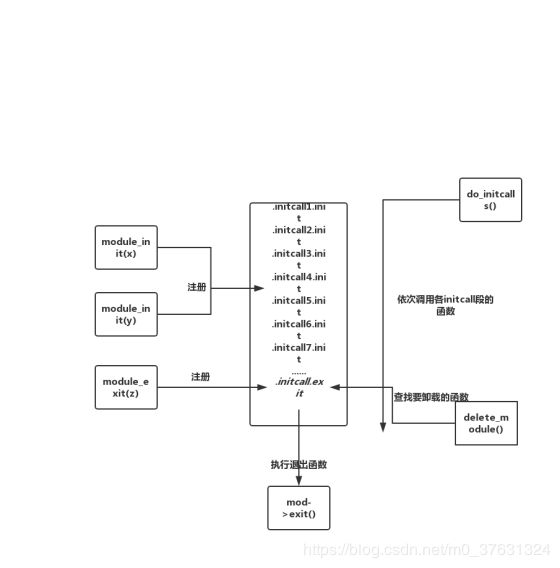
3. 模块启动与初始化
3.1 启动时调用 do_initcalls()
//内核启动
start_kernel(void)
--->static void __init do_initcalls(void)
static void __init do_initcalls(void)
{
int level;
//依次执行前8个initcall初始化段的函数
for (level = 0; level < ARRAY_SIZE(initcall_levels) - 1; level++)
do_initcall_level(level);
}
--->static void __init do_initcall_level(int level)
static void __init do_initcall_level(int level)
{
initcall_entry_t *fn;
strcpy(initcall_command_line, saved_command_line);
parse_args(initcall_level_names[level],
initcall_command_line, __start___param,
__stop___param - __start___param,
level, level,
NULL, &repair_env_string);
trace_initcall_level(initcall_level_names[level]);
//执行该level段下的所有初始化函数
for (fn = initcall_levels[level]; fn < initcall_levels[level+1]; fn++)
do_one_initcall(initcall_from_entry(fn));
}
--->int __init_or_module do_one_initcall(initcall_t fn)
int __init_or_module do_one_initcall(initcall_t fn)
{
int count = preempt_count();
char msgbuf[64];
int ret;
if (initcall_blacklisted(fn))
return -EPERM;
do_trace_initcall_start(fn);
//执行初始化函数
ret = fn();
do_trace_initcall_finish(fn, ret);
msgbuf[0] = 0;
if (preempt_count() != count) {
sprintf(msgbuf, "preemption imbalance ");
preempt_count_set(count);
}
if (irqs_disabled()) {
strlcat(msgbuf, "disabled interrupts ", sizeof(msgbuf));
local_irq_enable();
}
WARN(msgbuf[0], "initcall %pS returned with %s\n", fn, msgbuf);
add_latent_entropy();
return ret;
}
3.2 加载时调用 do_one_initcall()
int __init_or_module do_one_initcall(initcall_t fn)
{
int count = preempt_count();
char msgbuf[64];
int ret;
if (initcall_blacklisted(fn))
return -EPERM;
do_trace_initcall_start(fn);
//执行初始化函数
ret = fn();
do_trace_initcall_finish(fn, ret);
msgbuf[0] = 0;
if (preempt_count() != count) {
sprintf(msgbuf, "preemption imbalance ");
preempt_count_set(count);
}
if (irqs_disabled()) {
strlcat(msgbuf, "disabled interrupts ", sizeof(msgbuf));
local_irq_enable();
}
WARN(msgbuf[0], "initcall %pS returned with %s\n", fn, msgbuf);
add_latent_entropy();
return ret;
}
3.3 修改模块的加载顺序
3.3.1 内核模块加载顺序
Linux内核为不同驱动的加载顺序对应不同的优先级,定义了一些宏: include\linux\init.h
#define pure_initcall(fn) __define_initcall("0",fn,1)
#define core_initcall(fn) __define_initcall("1",fn,1)
#define core_initcall_sync(fn) __define_initcall("1s",fn,1s)
#define postcore_initcall(fn) __define_initcall("2",fn,2)
#define postcore_initcall_sync(fn) __define_initcall("2s",fn,2s)
#define arch_initcall(fn) __define_initcall("3",fn,3)
#define arch_initcall_sync(fn) __define_initcall("3s",fn,3s)
#define subsys_initcall(fn) __define_initcall("4",fn,4)
#define subsys_initcall_sync(fn) __define_initcall("4s",fn,4s)
#define fs_initcall(fn) __define_initcall("5",fn,5)
#define fs_initcall_sync(fn) __define_initcall("5s",fn,5s)
#define rootfs_initcall(fn) __define_initcall("rootfs",fn,rootfs)
#define device_initcall(fn) __define_initcall("6",fn,6)
#define device_initcall_sync(fn) __define_initcall("6s",fn,6s)
#define late_initcall(fn) __define_initcall("7",fn,7)
#define late_initcall_sync(fn) __define_initcall("7s",fn,7s)
#define __initcall(fn) device_initcall(fn)
把自己的驱动的函数名用这些宏去定义之后, 就会对应不同的加载时候的优先级。其中,我们写驱动中所用到的module_init对应的是
#define module_init(x) __initcall(x);
#define __initcall(fn) device_initcall(fn)
所以,驱动对应的加载的优先级为6
在上面的不同的优先级中, 数字越小,优先级越高。 同一等级的优先级的驱动,加载顺序是链接过程决定的,结果是不确定的,我们无法去手动设置谁先谁后。 不同等级的驱动加载的顺序是先优先级高,后优先级低,这是可以确定的。
3.3.2 修改加载顺序
对于以下两个驱动模块加载,他们优先级都为6;加载顺序不确定,由链接程序确定。
module_init(as352x_afe_init);
module_init(enc28j60_init);
如果要改变改变(确定)两者初始化的顺序,可以使用以下三种方法:
a.将其中一个设备驱动初始化提高一个优先级到5;使用
fs_initcall(as352x_afe_init);
b.将其中一个设备驱动初始化降低一个优先级到7;使用
late_initcall(enc28j60_init);
c.新建一个初始化优先级,单独新建一个初始化段
步骤如下:
1.新建一个优先级
include\linux\init.h中:
#define pure_initcall(fn) __define_initcall("0",fn,1)
#define core_initcall(fn) __define_initcall("1",fn,1)
#define core_initcall_sync(fn) __define_initcall("1s",fn,1s)
#define postcore_initcall(fn) __define_initcall("2",fn,2)
#define postcore_initcall_sync(fn) __define_initcall("2s",fn,2s)
#define arch_initcall(fn) __define_initcall("3",fn,3)
#define arch_initcall_sync(fn) __define_initcall("3s",fn,3s)
#define subsys_initcall(fn) __define_initcall("4",fn,4)
#define subsys_initcall_sync(fn) __define_initcall("4s",fn,4s)
#define fs_initcall(fn) __define_initcall("5",fn,5)
#define fs_initcall_sync(fn) __define_initcall("5s",fn,5s)
#define rootfs_initcall(fn) __define_initcall("rootfs",fn,rootfs)
#if 1
#define prev_device_initcall(fn) __define_initcall("6",fn,6) //新建prev_device_initcall初始化段
#define prev_device_initcall_sync(fn) __define_initcall("6s",fn,6s)
#define device_initcall(fn) __define_initcall("7",fn,7)
#define device_initcall_sync(fn) __define_initcall("7s",fn,7s)
#define late_initcall(fn) __define_initcall("8",fn,8)
#define late_initcall_sync(fn) __define_initcall("8s",fn,8s)
#else
#define device_initcall(fn) __define_initcall("6",fn,6)
#define device_initcall_sync(fn) __define_initcall("6s",fn,6s)
#define late_initcall(fn) __define_initcall("7",fn,7)
#define late_initcall_sync(fn) __define_initcall("7s",fn,7s)
#endif
2.用对应新的宏,定义我们的驱动:
prev_device_initcall(as352x_afe_init);
3.在对应的链接文件中把宏加进去
include\asm-generic\vmlinux.lds.h //具体链接脚本与板子有关
#if 1
#define INITCALLS \
*(.initcall0.init) \
*(.initcall0s.init) \
*(.initcall1.init) \
*(.initcall1s.init) \
*(.initcall2.init) \
*(.initcall2s.init) \
*(.initcall3.init) \
*(.initcall3s.init) \
*(.initcall4.init) \
*(.initcall4s.init) \
*(.initcall5.init) \
*(.initcall5s.init) \
*(.initcallrootfs.init) \
*(.initcall6.init) \
*(.initcall6s.init) \
*(.initcall7.init) \
*(.initcall7s.init) \
*(.initcall8.init) \
*(.initcall8s.init)
#else
#define INITCALLS \
*(.initcall0.init) \
*(.initcall0s.init) \
*(.initcall1.init) \
*(.initcall1s.init) \
*(.initcall2.init) \
*(.initcall2s.init) \
*(.initcall3.init) \
*(.initcall3s.init) \
*(.initcall4.init) \
*(.initcall4s.init) \
*(.initcall5.init) \
*(.initcall5s.init) \
*(.initcallrootfs.init) \
*(.initcall6.init) \
*(.initcall6s.init) \
*(.initcall7.init) \
*(.initcall7s.init)
#endif
4.编译运行即可修改模块注册顺序
4. 总结