视觉惯性SLAM:VINS-Mono
视觉惯性SLAM:VINS-Mono
- 这篇博客
- 一些符号说明
- IV 测量数据的预处理
- A.视觉处理前端
- B.IMU预积分
- V. 初始化
- A.Vision-Only SfM in Sliding Window
- B.Visual-Inertial Alignment
- VI.TIGHTLY COUPLED MONOCULAR VIO
- A.公式介绍
- B.IMU误差
- C.视觉误差
- D.边缘化
- E.位姿优化
- F.以IMU采集的速率估计位姿值
- VII 重定位(和VI ORB不同)
- A.闭环检测
- B.特征找回
- C.紧耦合的重定位
- VIII全局优化和地图复用
- A.四个存在漂移问题的变量
- B.向位姿图中加KF
- C. 4自由度的位姿图优化
- D.位姿图合并
- E.位姿图保存
- F.加载位姿图
- 结尾
这篇博客
最近看了VINS-Mono,所以就写篇关于系统各部分内容的总结,方便自己之后进行论文的回顾,也希望大家能从中有所收获。一些我认为比较重要的地方和自己的理解都用了颜色标注。好的,话不多说,直接莽。
一些符号说明
1、 ( . ) w (.)^{w} (.)w:变量表示在世界坐标系下;
2、 ( . ) b (.)^{b} (.)b:变量表示在 I M U IMU IMU坐标系(Body坐标系)下;
3、 ( . ) c (.)^{c} (.)c:变量表示在相机坐标系下;
4、 R 、 q R、q R、q:旋转矩阵及其对应的四元数(在紧耦合的状态变量中使用);
5、 q b w , p b w q_{b}^{w}, p_{b}^{w} qbw,pbw:从 I M U IMU IMU坐标系到世界坐标系的旋转和平移变换;
6、 ⨂ {\bigotimes } ⨂:表示四元数之间的乘法;
7、 b k , c k b_{k}, c_{k} bk,ck:第 k k k帧对应的 I M U IMU IMU和相机坐标系;
8、 g w = [ 0 , 0 , G ] T g^{w}=[0,0,G]^{T} gw=[0,0,G]T:世界坐标系下的重力向量;
9、 ( . ) ^ \hat{(.)} (.)^:表示带有噪声的测量值或一个定值估计;
10、 b w , b a b_{w}, b_{a} bw,ba:表示陀螺仪和加速度偏差。
IV 测量数据的预处理
这部分介绍如何处理视觉和IMU的测量数据。大致内容为:跟踪每一帧,在新帧上提取一定数量特征点;预积分IMU数据。
A.视觉处理前端
对于新获得的当前帧:
1、用 K L T KLT KLT稀疏光流法跟踪已有特征点(上一帧中的);
2、若跟踪到的特征点较少,则在当前帧中提取新的特征点,以保证至少有100-300个特征点(提取的特征点应满足均匀分布);
3、用跟踪上的特征点求解前后帧的 F F F单应矩阵,并用RANSAC法进行外点剔除;
4、将剩余内点反投影到当前帧的归一化平面上
此外,这个部分还需要判断是否产生新的关键帧。判断条件是:
∙ {\bullet } ∙ 跟踪到的特征点的平均视差大于一定阈值;
∙ {\bullet } ∙ 跟踪到的特征点数量小于一定阈值。
B.IMU预积分
1)IMU的噪声和偏差:
IMU 元件获得的原始测量值(角速度 w ^ \hat{w} w^和加速度 a ^ \hat{a} a^)会受到重力、偏差和噪声的影响:

这些测量值是在 t t t时刻的IMU坐标系中表示 。式中 ( . ) t (.)_{t} (.)t表示真实值, n n n表示白噪声。而某一时刻的加速度 b a t b_{a_{t}} bat和陀螺仪偏差 b w t b_{w_{t}} bwt被建模为随机行走(它们的导数为高斯白噪声)。
2)预积分:
先设定一个偏差的估计值,将 b k b_{k} bk和 b k + 1 b_{k+1} bk+1这前后两帧的 IMU 数据进行预积分。积分后的结果在 b k b_{k} bk的坐标系中表示:


可以看出,式3 中的每一项都能直接通过 IMU 的测量数据来求解,它们表示的是前后两帧之间的相对变换关系。
3)偏差修正:
如果估计的偏差 b a k b_{a_{k}} bak、 b w k b_{w_{k}} bwk发生了微小的变化,就要相应的调整预积分的结果(根据它们对 b a k b_{a_{k}} bak、 b w k b_{w_{k}} bwk的雅可比矩阵):
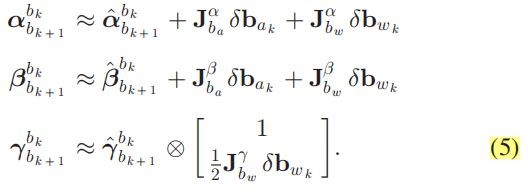
如果偏差变化太大,则需要用新的值重新进行预积分。
V. 初始化
通过视觉数据和IMU数据构建约束关系,以获得一些必要变量的初值。
A.Vision-Only SfM in Sliding Window
先只使用视觉来获得一系列相机位姿和地图点坐标(未知尺度),构建最初的滑动窗口。为控制复杂程度,只在窗口中保留一定数量的帧。
具体的步骤如下:
1、构建含有一定数量帧的滑动窗口,此时所有帧的位姿都未知;
2、获得新的帧,为其在窗口内寻找一个匹配帧(要求:匹配的特征个数多于30,同时平均视差大于20个像素单位);
3、使用五点法恢复两帧之间的R和sp(带尺度的平移);
4、随意设一个尺度 s ′ s_{'} s′,对所有被两帧观测到的特征进行三角化,构建初始地图点;
5、用这些地图点估计出窗口中其他帧的位姿(使用PnP法);
6、用BA优化各帧的位姿(优化重投影误差)。
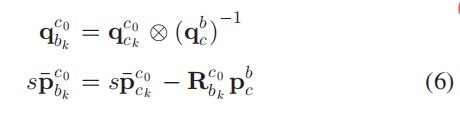
因为还没有关于世界坐标系的任何信息,所以将窗口内第一帧作为第一参考帧 ( . ) c 0 (.)^{c_{0}} (.)c0,其余帧的位姿和地图点的坐标都用第一参考帧为基准来表示,分别记为 ( . ) c k c 0 , ( . ) c 0 (.)_{c_{k}}^{c_{0}}, (.)^{c_{0}} (.)ckc0,(.)c0。
根据标定好的相机到 IMU 元件的变换关系,可以将相机坐标系转换到IMU坐标系,但是 s s s 是未知的:
B.Visual-Inertial Alignment
原理:将 A部分估计的位姿和IMU数据的预积分结合起来,估计出尺度、偏差等变量。(具体求解方法和 VI ORB-SLAM 存在一些不同,最大的不同在于这里使用四元数表示旋转)
1)陀螺仪偏差 b w b_{w} bw估计:
对于滑动窗口内相邻两帧有用视觉估计出的位姿 q b k c 0 , q b k + 1 c 0 q_{b_{k}}^{c_{0}} , q_{b_{k+1}}^{c_{0}} qbkc0,qbk+1c0,以及IMU预积分的结果 τ ^ k + 1 k \hat{\tau }_{k+1}^{k} τ^k+1k。所以可通过最小化下面公式的误差来获得 b w b_{w} bw:

式中 B B B表示窗口内所有帧。在获得 b w b_{w} bw新的估计值后,重新计算一次IMU预积分。
2)速度 v v v、重力向量 g c 0 g^{c_{0}} gc0和尺度估计 s s s:
这一阶段估计的所有状态变量如下:

对于滑动窗口内前后两帧 b k , b k + 1 b_{k}, b_{k+1} bk,bk+1有下面的公式(这里也忽视了先加速度偏差,和VIORB一样):

然后将式(9)和式(6)混合,可以获得下面的线性方程组:
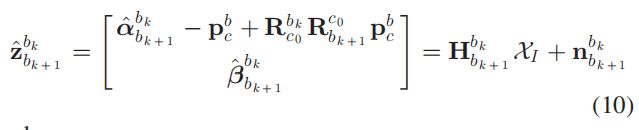
其中 z ^ k + 1 k \hat{z }_{k+1}^{k} z^k+1k是由 IMU 测量数据计算得出(带噪声),而 H b k + 1 b k H_{b_{k+1}}^{b_{k}} Hbk+1bk由视觉的计算结果组成:

最后通过优化下面的误差获得各帧的速度,重力向量(在第一参考帧坐标系 ( . ) c 0 (.)^{c_{0}} (.)c0下)和尺度:

3)优化重力向量:
由于重力向量 g c 0 g^{c_{0}} gc0的大小是已知的G,所以可以想象重力向量在一个半径为G的圆上,如图4:

此时重力向量就只有2个自由度,可在图中的重力向量的切平面上用两个正交的变量去扰动它(改变其方向): b 1 、 b 2 b1、b2 b1、b2。扰动的公式为: G ( g ^ ˉ + δ g ) , δ g = w 1 b 1 + w 2 b 2 G(\bar{\hat{g}}+\delta g), \delta g=w_{1}b_{1}+w_{2}b_{2} G(g^ˉ+δg),δg=w1b1+w2b2。其中G是重力的大小(用这个可能更好理解一点), g ^ ˉ \bar{\hat{g}} g^ˉ是重力的单位方向向量, b 1 、 b 2 b_{1}、b_{2} b1、b2是切平面上的两个正交基; w 1 、 w 2 w_{1}、w_{2} w1、w2是两个扰动方向的大小。最后 G ( g ^ ˉ + δ g ) G(\bar{\hat{g}}+\delta g) G(g^ˉ+δg)替换掉式子(9)中的 g g g,将2自由度的 δ g \delta g δg 和其他变量一起求解(包括速度 v v v、尺度 s s s、加速度偏差 b a b_{a} ba)。
个人理解:所有变量的求解思路和VI ORB-SLAM的思路是相似的,但更新重力向量的方式有所不同
4)完成初始化:
使用最终求出的重力向量与真实世界的重力向量 [ 0 , 0 , − 1 ] T [0,0,-1]^{T} [0,0,−1]T,求出 q c 0 w q_{c_{0}}^{w} qc0w,即第一参考帧与世界坐标系之间的变换关系。然后将地图点都转到世界坐标系中,轨迹也用求出的尺度进行修正。
VI.TIGHTLY COUPLED MONOCULAR VIO
在滑动窗口内求解每个视觉+惯性的紧耦合状态变量,如图5所示:
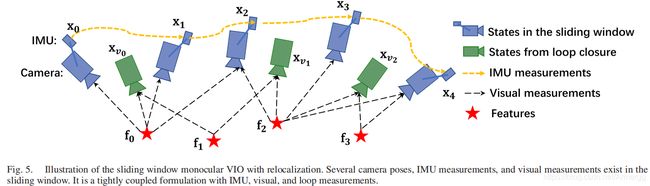
A.公式介绍
紧耦合后的状态变量如下:

x k x_{k} xk是第 k k k个状态变量,包含位姿、速度和偏差。 λ l \lambda _{l} λl是第 l l l 个地图点在其第一观测帧中的逆深度。此时待优化的误差函数为:
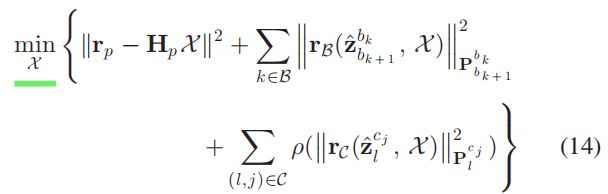

式中第一项是先验误差,第二项是 IMU 误差,第三项是重投影误差,式(15) 表示鲁棒核函数。
B.IMU误差
滑动窗口内相邻两帧间的IMU误差为:
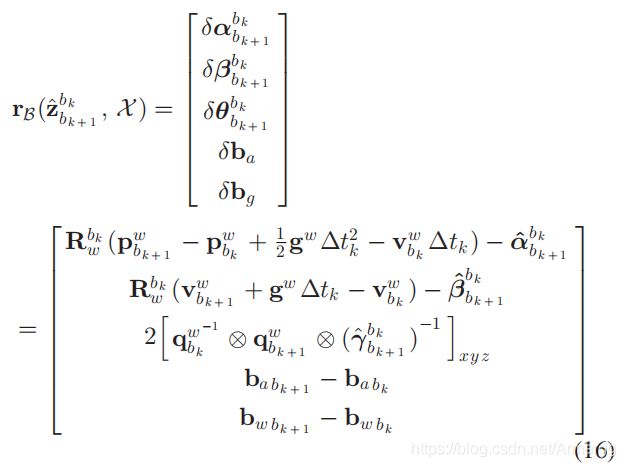
式中[.]XYZ表示提取出四元数Q中的向量部分来表示误差状态。
个人理解:每一个误差项=当前估计的状态变量求出的相对变换 — IMU预积分求出的相对变换。
C.视觉误差
在归一化平面上计算视觉误差。以在第 i i i 帧上观测到的第 l l l 个地图点为例,他在第 j j j 帧上的视觉误差为:
 式中 π {\pi } π是相机投影函数; u , v u,v u,v是像素坐标。
式中 π {\pi } π是相机投影函数; u , v u,v u,v是像素坐标。
由于上述视觉误差的自由度为2,所及将误差向量投影到切平面上,并用两个正交方向上的扰动来优化误差,如图6所示:

个人理解:这里的2自由度是因为重投影误差是在归一化平面上的,有一维坐标一直为1
D.边缘化
用这个方法控制滑动窗口内KF和地图点的数量,并把边缘化的帧作为一个先验信息。边缘化的两种情况如图7所示:
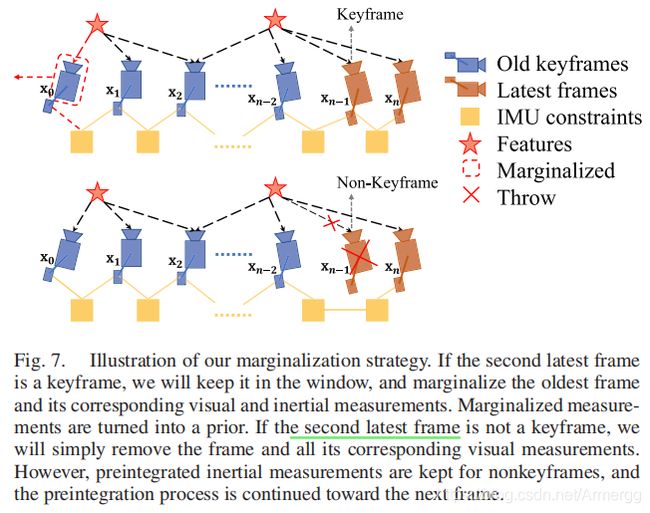
图中棕色图形表示两个最新的帧,此时边缘化的操作有两种:
1、若图中n-1帧是KF,则将其放入窗口中,并把窗口中最老的KF丢掉。(但保留它的IMU信息作为先验)
2、若n-1帧不是KF,则只保留它的IMU预积分结果,也作为一个先验信息。(帮助计算KF与下一帧之间的IMU预积分)
(对第一种情况的先验信息不是很理解)
E.位姿优化
为了降低计算量,只进行运动上的位姿优化,如图8所示:

如图所示,不优化窗口内的所有 K F KF KF,只优化最近一定数量的 K F KF KF和当前帧。优化时使用的误差式子和式(14)一样,即 IMU 误差、视觉误差和先验误差。
F.以IMU采集的速率估计位姿值
系统的处理速率受帧速率影响,但可以结合最新帧的估计值,使用之后一系列(在下一帧到来前的)的IMU数据来获得和IMU采集速率一样的位姿估计。这个高速率的估计值可用于闭环的状态反馈。(最后一句话不是很理解,期待各位博友指点迷津)
VII 重定位(和VI ORB不同)
作用:消除累积误差(漂移)
A.闭环检测
使用DBOW2词袋中的单词来描述每一帧,再通过这个描述完成闭环检测。(这一部分可参考《视觉SLAM十四讲》P303)
B.特征找回
目的:确定闭环对应的两个 K F s KFs KFs之间的特征匹配和变换关系。
当检测到闭环后,窗口(一般是当前最新的 K F KF KF)与匹配的闭环帧(记为 K F v KF_{v} KFv)(来自系统保存 K F s KFs KFs的数据库中)的关系就能被建立起来(通过特征匹配)。为了降低误匹配,使用下面两个几何的方法来去除外点:
1)2d-2d:通过RANSAC求出 K F v KF_{v} KFv和当前 K F KF KF之间的单应矩阵 F F F。
2)3d-2d:将滑动窗口内已有地图点,和其在 K F v KF_{v} KFv上匹配的观测点进行基于RANSAC法的PnP问题求解。
如此就能求出 v v v和当前 K F KF KF之间的变换关系,并剔除了外点。
C.紧耦合的重定位
目的:发现闭环后,将当前滑动窗口与以往帧进行位姿对齐。
窗口内每产生一个新的 K F KF KF就为其在数据库中查询是否存在匹配的闭环KF。在找到匹配的闭环 K F KF KF后(记为 K F v KF_{v} KFv),将它作为一个闭环约束,构建一个新的误差函数:

式中 K F v KF_{v} KFv提供的约束就是滑动窗口内地图点在 K F v KF_{v} KFv上的重投影误差,它可以帮助修正窗口的所有地图点坐标和 K F s KFs KFs的位姿。图9展示了整个闭环检测和重定位的过程:
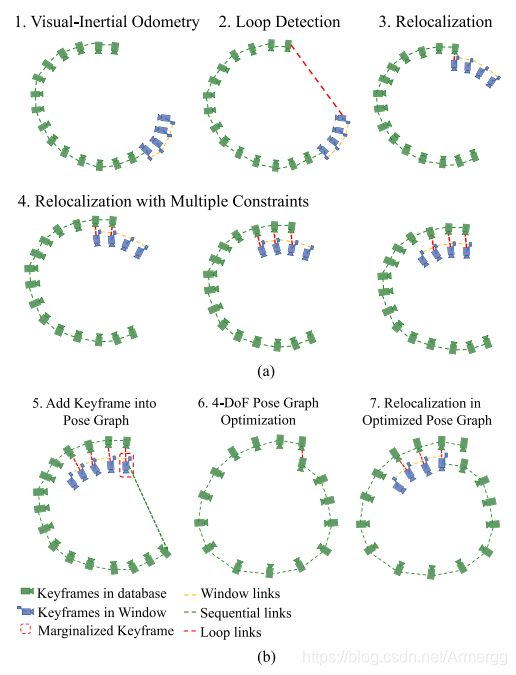
从图中可以看出,前三步为:正常跟踪、发现闭环、重定位滑动窗口。在这之后,窗口内还有不断产生新的 K F KF KF,新来的KF也可能找到对应的闭环帧,所以闭环约束就会增加,这就形成了多视图约束。
个人理解 :在第一个发生闭环的KF即将被边缘化时,进行一次全局BA,把整体轨迹整合进行修正。
VIII全局优化和地图复用
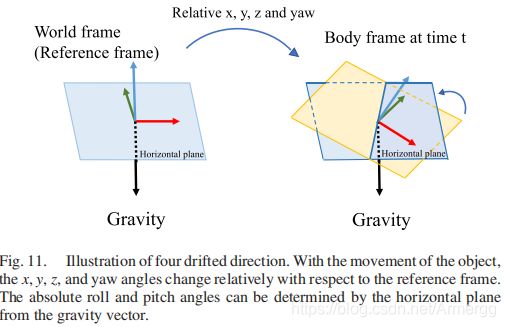
A.四个存在漂移问题的变量
受益于重力向量的惯性测量,系统可以估计 ( . ) b i (.)^{b_{i}} (.)bi与 ( . ) w (.)^{w} (.)w在roll、pitch上的绝对旋转(x,y轴旋转,z轴的旋转不会影响重力向量的方向),如图11所示。此时只会在 x , y , z , y a w x,y,z,yaw x,y,z,yaw四个变量上产生累积误差。所以全局位姿图优化只用优化这四个变量。
B.向位姿图中加KF
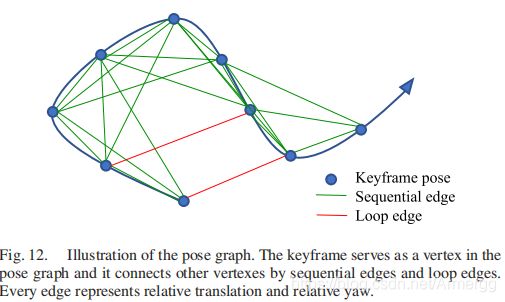
视觉-惯性里程计处理后的KF会加到位姿图中。它 会被当作一个顶点,并通过两类边和其他顶点产生联系:
1) 连续边:某个 K F KF KF与之前的 K F s KFs KFs之间的相对变换关系。只管那四个变量:
2) 闭环边:只有形成闭环的 K F s KFs KFs之间才有,表示它们之间的相对变换,公式和式(19)一样。
整个位姿图的样子就如下图所示:
C. 4自由度的位姿图优化
定义 i 、 j i、j i、j两个KF之间的边的误差为:

其中 θ ^ , ϕ ^ {\hat{\theta }}, \hat{\phi } θ^,ϕ^是固定的。整个位姿图中所有边产生的总误差公式为:

式中 S \mathit{S} S 为所有连续边, L \mathit{L} L为闭环边。 ρ \rho ρ 是鲁棒核函数。
位姿图优化和重定位在两个异步的线程中同时进行,目的是:
1、可让数据库中优化后的位姿图立马能用于新的重定位操作中(异步不用互相等待);
2、
D.位姿图合并
通过地图间的闭环关系,将当前构建的位姿图与已有的位姿图合并。找到闭环关系后,直接使用全局BA即可。过程如图13所示:

E.位姿图保存
数据的保存内容:所有顶点和边;关键帧(顶点)的状态变量。
举个例子:

其中 i i i 表示帧的编号, p ^ i w \hat{p}_{i}^{w} p^iw、 q ^ i w \hat{q}_{i}^{w} q^iw是这一帧的平移和旋转变换(从当前帧到世界坐标系)。 v v v是与这个帧形成闭环的匹配帧的编号, p ^ i v i \hat{p}_{iv}^{i} p^ivi和 ψ ^ i v \hat{\psi }_{iv} ψ^iv是他们之间的相对位移和 y a w yaw yaw 方向的旋转角度(由重定位获得)。 D ( u , v , d e s ) D(u,v,des) D(u,v,des)是这一帧中的特征点坐标和它对应的描述子。
F.加载位姿图
怎么保存的就怎么加载。
结尾
一口气看完两篇视觉惯性SLAM,感觉也大致懂了这类SLAM的工作原理。还是要抓紧看代码,毕竟编程能力十分重要(太忙了)。最后希望这篇博客能帮助到大家,其中存在的不足也希望大家能够指出,十分感谢!
参考资料:
1、VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator
2、《视觉SLAM十四讲》