无人驾驶技术入门(一):百度无人驾驶的引路人
各位老铁好!无人驾驶技术入门的第一讲开课啦!今天的课程我会介绍一位来自旧金山的创业公司,他们曾是百度无人驾驶的引路人。
百度在2017年9月发布了Apollo 1.5,可以实现固定车道的自动驾驶功能。实现固定车道自动驾驶功能的硬件配置如下:
汽车
Lincoln MKZ

这辆车是Baidu向AutonomouStuff公司定制的一辆改装车,可以看到车上有大大的AS logo。
AutonomouStuff(https://autonomoustuff.com/,简称AS)是一家专门提供自动驾驶改装车的公司。不仅百度,各种自动驾驶创业公司在没有抱到整车厂大腿的时候,都是找他们购买无人驾驶改装车。细心地盆友肯定注意到,很多初创公司(比如AutoX、景驰等)都是基于Lincoln MKZ做自动驾驶研究的。
为什么会这样?
因为汽车的底层线控系统一般都是封闭的,为了安全,整车厂和Tier1不会轻易对外部开放。那么没有整车厂合作的创业公司怎么办?
哪里有需求,哪里就有市场。
得益于AS的创始人与福特的特殊关系,福特给他们开放了部门Lincoln MKZ的底层线控系统的控制权。除了Lincoln MKZ,他们还可以提供Ford fusion以及丰田Lexus RX 450h的改装方案(鬼知道他们是怎么拿到丰田的线控系统的)。

图片出处:autonomoustuff
你以为他们提供这三款已经量产的车型的改装就结束了?Naive!他们还提供了其他千奇百怪车型,满不同客户的需求。

图片出处:autonomoustuff
我觉得某些车型的确很适合高校和小团队做自动驾驶。
控制器
Apollo 1.0和Apollo 2.0所用到的控制器不同。
由于Apollo 1.0仅实现固定GPS路径的巡线功能,还没有感知层面的计算需求,因此所采用的是很常见的工控机——Nuvo-5095GC,如下图。

图片出处:github.com
Apollo 1.5不仅加入了64线激光雷达的感知模块,也加入了高精度电子地图的引擎。因此无论是要完成基于深度学习的障碍物检测、识别功能,还是驱动高精度电子地图的引擎,都需要较为强劲的控制器。所以他们采用了这样的工控机——Nuvo-6108GC。

图片出处:github.com
光看这个散热就觉得很高端...
惯导+GPS天线
Apollo 1.0和2.0沿用了同一套实现定位的装置。
Apollo提供了两种惯导方案:
①The NovAtel SPAN-IGM-A1

图片出处:github.com
②NovAtel SPAN ProPak6 and NovAtel IMU-IGM-A1

图片出处:github.com
看到这里读者肯定蒙圈了,这名字忒复杂,而且东西也看起来很玄幻。先不用放在心上,现在只需要知道这个东西和无人车的定位相关,我会在后面的分享中着重介绍惯导的作用,以及为什么它很重要。
GPS天线,这个就很常见了,有大有小,有长有短。大家经常在路上看到私家车上顶着一根天线或者鲨鱼鳍,那东西十有八九是GPS天线。
不过无人车对定位要求很高,因此它的天线看起来很大,很笨重。
Apollo用的GPS天线是NovAtel GPS-703-GGG-HV,长这样:

图片出处:github.com
一般安装在车辆顶部,也有安装在车辆后备箱上的。下图是Apollo 1.0各传感器的安装位置。
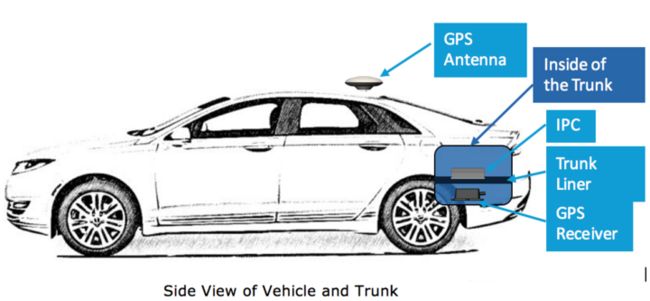
图片出处:github.com
CAN卡
AS给百度开放了底层线控系统,不过线控系统只认识一种语言——CAN。
计算机只懂得二进制,计算好了该往哪走,都无法传达给线控系统。 所以他们之间差一个“翻译”,这时候CAN卡就出现了。
Apollo 1.0和1.5都是用的是同一款CAN卡——ESD CAN-PCIe/402,就是这货。

图片出处:github.com
64线激光雷达
Apollo 1.0和1.5最大的不同是激光雷达Velodyne HDL-64E S3,先来看看它的安装位置。
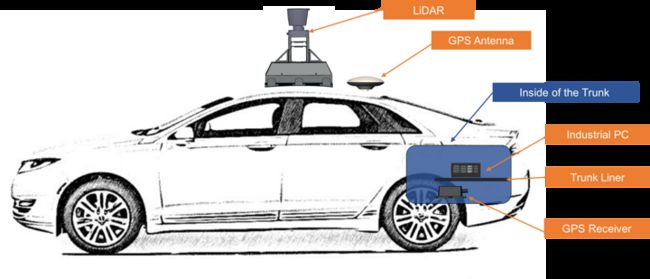
图片出处:github.com
没错,和很多车一样,装在车顶,完成360度的激光探测。
Velodyne HDL-64E S3是目前为止可以买到的最贵的激光雷达了,而且还独此一家提供64线激光雷达的解决方案,百度和福特都十分看到,因此都投资了这家公司。在后面的分享中,我会给大家更细致地介绍激光雷达的原理以及他们能实现哪些服务于自动驾驶的功能。
小结
好了\(^o^)/~,这篇内容介绍基本上可以让大家了解百度Apollo1.5的硬件方案,以及背后有这么一家相当低调的公司。
后续我会对Apollo计划中出现的传感器做更加细致的分析,也期待你的阅读~
来源:第一电动网
作者:自动驾驶_陈光
本文地址:https://www.d1ev.com/kol/63020