进阶无人驾驶—行业概述
课程简介
欢迎大家继续学习无人驾驶的知识,本次课程已经是入门后的进阶课程了,所以很多内容上可能会有不熟悉或者不懂的,我会尽量为大家讲解清楚,如果不清楚可以留言我们一起讨论。
课程讲述任务驾驶行业及Apollo平台的核心技术模块,帮助学习者熟悉无人驾驶行业,进一步了解相关技术模块,快速上手Apollo及自动驾驶技术。
一、自动驾驶行业概述
本次课程由DAVID ZHOU(Apollo平台产品负责人,参与所有Apollo版本的发布)。
大家可能知道Apollo平台秉承的观念是:Open Capability、Shared Resources、Accelerated Innovation、Sustained Mutual Benefit。相信大家都知道他们的意思:开发能力、共享资源、加速创新和合作共赢。
现如今的我们生活在两个时代交叠的时期,这样的我们就会受到两个时代的影响,我们是幸运的,也是具有很大压力的,所以我们一定要把握机会,为无人驾驶行业作出贡献。
首先我们谈的是汽车共享,我们必须要有一个观察者应该具有的眼光去观察。你想一想身边,一直存在一个不知道什么时候便悄无声息出现的出租车这个行业,但是现如今我们已经习惯了这种共享出行。例如Uber和滴滴出行,但是车的利用率仍然很低。例如下图所示:
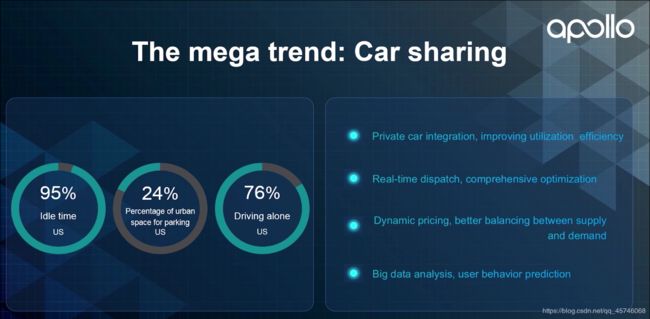
首先是调查美国汽车的空闲率,可以达到百分之九十五,可想而知,美国家庭的汽车不过就是一个代步工具,不用时就闲置在车库而不使用,汽车的利用率太低。
再者可以看到中间的数据,达到了百分之二十四,什么意思呢?就是说汽车停放所占据的空间达到了城市空间的百分之二十四,那是有多少车才会产生这样的空间占有率。假如把这百分之二十四的地换成住房或者绿地,可能会拉低高高在上的房价吧。
最后就是独自驾驶,其实现如今的观念都差不多,都在说私家车,所以非共享车占据那么高还是可以理解的。
通过上述三个调查,你又什么想法了吗?你觉得无人驾驶车的诞生会不会对这些造成天翻地覆的变化。
谈到这里就不得不提清洁能源汽车的巨头“特斯拉”,这是一个秉承新能源洗车的电车公司,正因为现如今新能源正处于风口,所以国家都会大力扶持,所以让我们看看这样的数据。
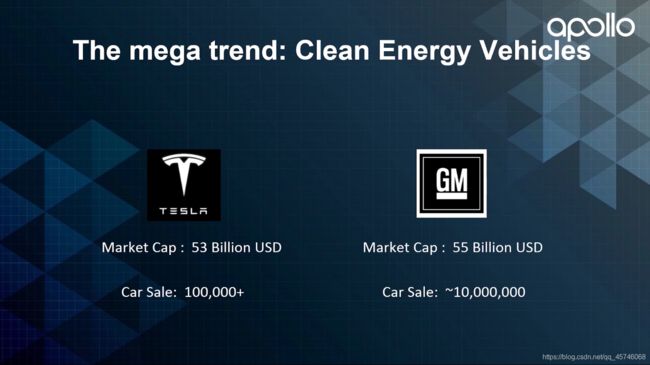
大家看到数据,就知道了,特斯拉一年就卖出几十万辆汽车,但是市值却达到了530亿美元。相比之下,和特斯拉有着差不多市值得汽车“通用GM”,一年却要卖出一千万辆车才能达到相同得市值。
为什么在投资者看来,这两个销售量差别近百倍的汽车公司,市值却差不多。说明未来新能源行业将会占据主导地位,所以我们需要把眼光放长远,才能够站在行业的顶尖。
中国也早就意识到了这些,但是我们一般汽车的技术和国外的技术还是有很大差距的,这不得不承认,主要是汽车发动机和刹车等领域。但是电动汽车主要的问题还是能源问题,所以我们国家政府还是希望能在弯道超车,成为行业巨头。
讲了前面的实例,接着我们回到自动驾驶:
虽然在英文中self driving和autonomous driving两者的意思有些许区别,但是我们所讲的并未涉及这些,所以下面我讲的不是太区分,不用太在意。
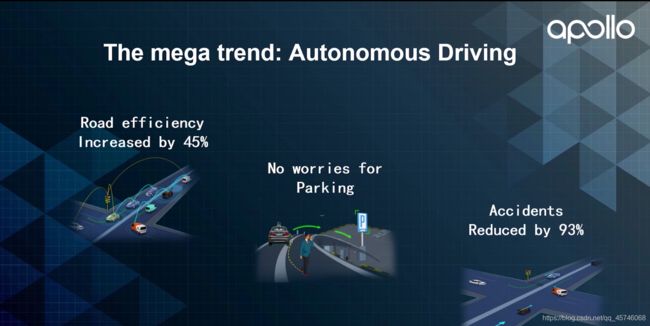
大家查一下资料就会知道,在交通致死的调查中,百分之九十三的车祸是人为操作失误导致的。而且根据研究发现,人在驾驶时,一分钟可以处理三十到一百个信息,就是说只要不是出现注意力分散的情况,没有其他环境影响的话,能够处理这些信息并操作。但是假如驾驶员分神,那就可能造成致命伤害。
但是无人车确实眼观四路耳听八方,他搜集的信息量巨大,而且它的处理能力很强,一分钟可以处理三千个信息,就是说是人类驾驶员的三十倍以上,可见其优势自然显现出来。
当然了,如果无人驾驶车行业成熟了之后,一定是比人类驾驶更安全。那么就会出现车祸断崖式降低的成果,这也会带来其他的好处,比如道路占用率下降,道路更通畅了,车祸的发生概论更降低了,这就是良性循环。当然经过研究,无人车行驶后会提高百分之四十的形式效率,相当于提高一半。
但是自动驾驶还有很长的路要走
这里有两个比较惨痛的例子,2015年特斯拉无人车在高速上行驶时,发现对面驶来一辆全身白色的大货车,在相机采集的数据经过处理后认为是蓝天白云,所以直接就冲了过去,发生车祸。另一个是2017年Uber,在行驶时,遇到一个推着手推车的老奶奶横穿马路,车辆识别不准确导致老奶奶当场被撞身亡。
特别是uber,它号称自己已经是L4级别的自动驾驶车了,所以在撞死人的责任上,它是负全责的,这就对无人车行业来说,是一个惨痛的打击。
下面我们一起回顾无人车的发展历程:
2005年,是对整个无人车行业来说关键的节点,因为美国国防部做了两次无人车挑战,第一届在2004年,因为参赛队伍较少,没有人夺冠。但是2005就由我们优达学城的Sebastian教授带领的团队夺得了冠军.然后接着google巨佬在2009年开始了研究路程,百度在2017年发布了Apollo第一个版本1.0寻机自动驾驶。
当然最终的时间也是意见不一,有的保守派认为至少要到2030-2040年才会让无人车下线,也有一些激进派认为2020-2021就能将无人车铺到道路上。但是绝不会有人认为到2045年以后,因为那时候无人驾驶就成为人们的日常了。
不过想要看一个行业的价值如何变化,就看该行业被投资的资金变化,相信无人车的投资金额一定会做大做强,我们还是用数据说话吧。

可以看到近年来投资金额都是billion级别的,可想而知它的估值越来越大了。想要了解更多的并购和收购新闻,可以自行搜索。我只记得英特尔收购mobileye(给Tesla提供相机的厂商,和Tesla因为责任闹掰)花费150亿美元。
所以这个行业有很大的优势:
第一是这个行业有很大的投资
第二是这个行业有很大的前景
第三是这个行业是真的很缺人
你不心动吗?
二、Apollo开源模块讲解-1
上面主要是又一次对无人驾驶这个领域进行了简要介绍,主要是观望一下未来的发展趋势,这节课所讲的知识比较苦涩难懂,希望大家和我一起,认真解决这个难题。

首先通过这个图就可以看到,无人驾驶汽车存在的技术相对于民用设备来说,还是比较靠前的了,不管是技术或者性能都是。
第一个可以看到无人车的计算机性能是PC的一百倍以上,而且环境感知的精度也达到了厘米级别,汽车电机也可以外联,被电脑控制以保持汽车的制动和其他移动功能,以及后面的集群点数据达到很大的数据量和人工智能。
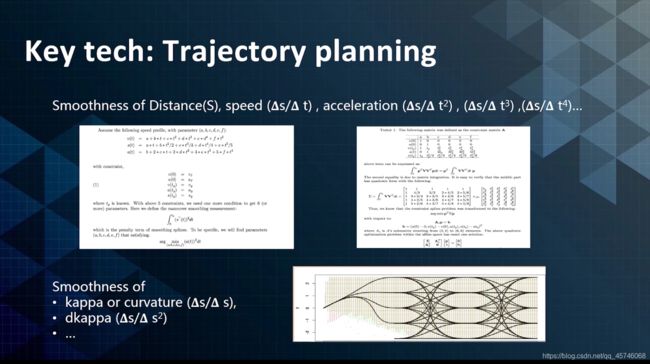
当然提高无人驾驶车的实现过程,第一个肯定会去想着实现高精度地图的研究和学习,因为如前面的初始高精度地图一样,高精度地图是支持规划、定位和预测等行为的基础。
整个高精度地图的创建过程就如同上图所示,虽然过程看着不复杂,但是实现起来仍十分复杂。
因为无人车和人不一样,所以无人车的地图必须达到车道级别(当然不仅仅是车道,更需要知道哪里有红绿灯?哪里有标识牌等等),这样才能在道路上安全行驶。例如他会在即将下高速公路时提前变道,而不是人的突然意识到要变道,所以无人车会做好提前量,搞好预判。总结高精度地图的价值如下。
| 无人车价值 |
|---|
| 第一、它会提供无人车预判的信息 |
| 第二、它可以减少无人车计算量 |
说到这里,我们就举例说说高精度地图如何让计算机减少计算量的,想象一下,假如你的无人车辆穿行在森林中,如果没有高精度地图告诉汽车旁边哪些是静态物,有可能是树,有可能是电线杆。那无人车就会一直识别计算会不会是人或者动物什么的,会不会突然跳出来,是不是会让我们的汽车累着,想想都觉得累。
下面就讨论一下定位:
当然了前面的初始无人驾驶也已经对该部分详细介绍了,我在这里主要是做一个回顾,勾起你们沉睡的知识。
我们接触最多的定位莫过于GPS了,手机就有,当然GPS是相对定位的,就是说它会不停的去发出电磁波,然后收到电磁波后,就开始计算这个时间,得出我和卫星之间的距离,当然我们对多卫星进行相对位置计算,就可以得出我们的准确位置,虽然精度不高,但对于人来说已经够用了。
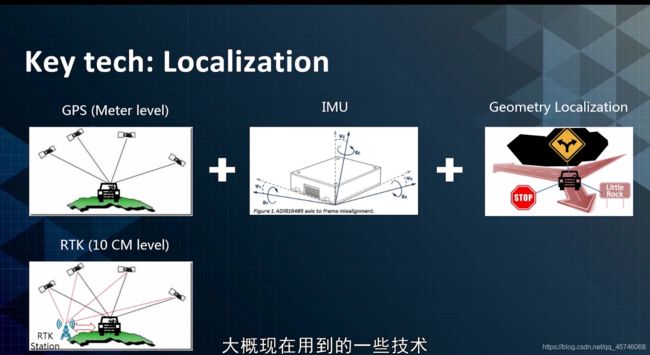
因为GPS的精度显然不足以支持我们无人车定位,所以研究了RTK技术,就是建立一个基站,静止状态,这样就可以通过基站的数据矫正来让定位的精度达到10厘米的级别,但是唯一麻烦的就是需要基站,而且还需和无人车距离不太远,大概距离要在16公里以内,可以想象一下,假如车上了高速,那不得接着建基站。
这时又出现了Imu惯性导航,当然它知识对GPS跳动的一个抹平,也就是说GPS定位会有跳动,人会突然跳到某个位置。而物体不可能瞬间移动,所以可以通过当前物体性质计算一段时间内的惯量。Imu和GPS一般都是一起使用的。
当然了,假如没有GPS信号时,我们怎么定位呢?这时就可以使用几何定位了,就是说你距离一棵大树的距离可以计算出来,然后另一棵大树也能计算出来,这样的话多棵大树就能确定你的具体位置。
上述几种技术融合起来便形成了定位模块,供无人车定位使用。
下面就要提到感知系统了,我们都知道感知器会有相机、激光雷达、雷达等组成。这里就要提到lidar(激光雷达),它的精度不仅仅是对特性大的物体,更是对形状很小的物体也能判断距离。例如前方有一辆载有钢筋的三轮车,它的钢筋都是朝向你的车,你不知道钢筋会不会碰到你,但是无人车知道,而且很清楚每一根的距离,但不说明它会靠的很近,而是离的更远,这就是区别。
当然lidar肯定也会存在缺点啊,比如说它对环境的要求极高,因为lidar是一个激光束,所以它的波长是纳米级别的,要是碰到雨天,则会和雨水发生碰撞,反射回来会告诉车前方有一堵墙或者什么,反正影响很大。而且它也看不到颜色。
和lidar一样起感知作用的radar(雷达)对环境要求不高,但是它会对静态物产生误报的现象。另一个camera对颜色有很敏感的感知,但是对距离却没有感知,所以这三者都是相辅相成的,不会说哪一个就能完成全部的任务。
这三个东西里面,可能只有激光雷达我们接触的比较少,或者听说的比较少,因为这也是现如今L4级别汽车研究的瓶颈之处。因为激光雷达还没有大规模生产,所以它的价格比较贵。而且它的种类比较多,下面介绍一下这些类型:
| 类型 | 优点 | 缺点 |
|---|---|---|
| 机械激光雷达 | 易实现 | 机械转动有磨损,且又大又重 |
| 棱镜激光雷达 | 没有机械磨损,价格低 | 车辆抖动会影响精度 |
| flash lidar | 容易提取,类似拍照,价格便宜 | 距离较近,只能看到五米以内(感觉没有用好吧) |
当我们拿到了感知器对环境感知所得来的数据,下一步我们应该怎么办呢?或者说利用数据可以做什么呢?
先放图:
你肯定也回忆起来我们所学的知识点了,当然是把所有传感器得到的数据进行融合,或者将数据同步叠加在一起。这个也是现在技术需要解决的一个难点,因为对于激光雷达来说,物体就是无数个点组成,你想把它的信息和camera的图形信息对应起来,本来就是很难的事情。
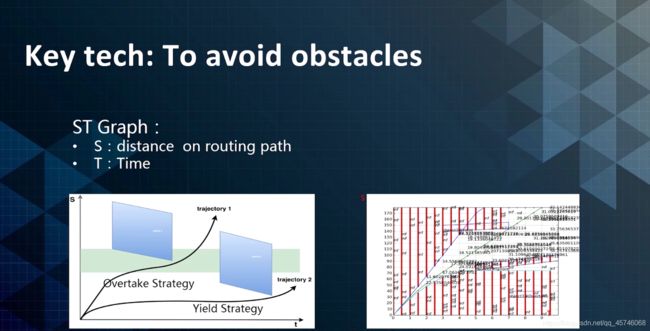
当我们把传感器的信息叠加融合到了一起,就可以根据物体的性质来预测判断它下一步的动作会是如何。
正如上图所示,我们得到预测就可以做出决策了,也就是规划和控制,就是说我们需要规划一下我们的路线,然后对汽车进行控制,以保持我们规划的路线行驶。
我们知道,在对汽车的控制时,不能是一堆齿轮在这边让我们控制,而是电脑控制的电机在控制刹车,油门和转向等。上图就是我们对汽车一些转置的数据,比如油门踩到20%时,加速度会是多少,踩刹车的百分比对速度影响。这些都是控制学的一些参数,如果有兴趣可以了解了解。
最后就是我们的云端服务器,这时我们后台管理和控制的大佬,相当于一个有经验的司机在做指导。
三、Apollo开源模块讲解-2
上一讲,我们对无人驾驶车的整个实现的流程做了梳理,大家也都唤醒了部分沉睡的记忆,下面我们先来探讨一下安全这个让大家都感兴趣的问题。我们这个无人车真的安全吗?
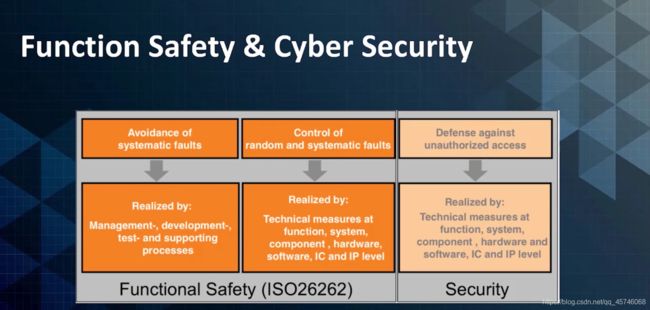
我展示的这张图片是ISO安全标准的相关内容,当然它的定义是很复杂的,这里知识列出来核心部分,具有很结构化的安全标准。可以看到Functional Safety是判定车辆自己的责任,而Security是判断为他人责任,比如网络有人破坏,有黑客入侵等。
通过上面的图,就带给大家一个好消息。ISO对于无人车的定义标准非常严格,设备的故障率达到了10fit,也就是10亿个小时坏一次,这种概率简直是逆天了,是不是感觉非常安全。当然了,还有一个坏消息,那就是根本没办法实现这个标准,基本完全按不可能的,所以我们还有很长的路要走。
有人说安全是没有极限的,我不认为安全没有极限,我认为安全也是有极限的:
ISO定义的极限安全标准:人在不同年龄会有正常死亡率,你的车辆死亡率比正常死亡率低十倍。这已经到了很低很低的标准了,而且也并不是我们口中所说的那样计算死亡人数,而是行业标准下计算,所以不必纠结这个标准,他一定是比现如今的汽车标准更严格。
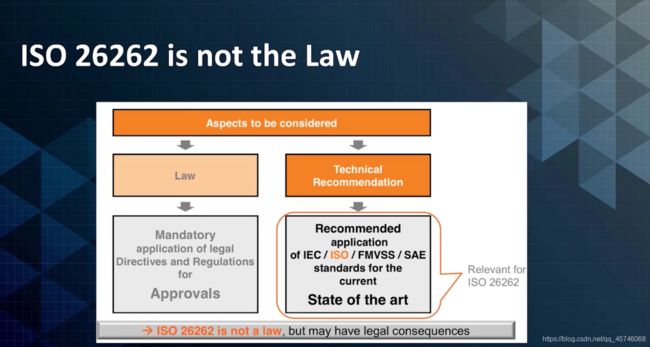
ISO不是一个法律,这就是一个行业标准,或者是一个生产流程规划书,它会对一些责任进行明确化,确保汽车在失责时根据具体的情况判断责任方。
例如:当我行驶在高速上时,一辆L2级别车的雷达判断到前方有一个疑似障碍物的物体,置信度为50%,但是它不会因为像一个障碍物就减速或者绕行,而是保持速度冲过去。因为L2汽车的定义是,驾驶员参与其中,并进行一切处理事件,所以他认为人已经判断过了,那不是障碍物。因为假如它刹车了,那么他有了自主控制的权力,而抛弃了人类驾驶员的控制权。假如前方不是障碍物而它进行了刹车,导致后方追尾,这个责任肯定归汽车厂商莫属。
上图是ISO对汽车安全等级做出的一个分析,我们去判断的模块标准,然后根据是否满足得出等级标准。
说了半天,其实就是想说明一个道理,那就是ISO是一个汽车行业的标杆,他有很多好处。
第一、告诉了汽车行业制造商什么是安全的标准;
第二、提高了汽车安全性能的监管机制;
第三、打官司时有评判标准。
如果汽车因为成品达不到标准而召回,就会产生十亿美元以上的费用,但是如果你的汽车制作标准达到了ISO标准,也就是人类所能达到的安全标准的极限,那么就没有必要召回,可以省去很多费用。
但是它也有坏处,就是必须按照标准流程走,一个都不能少,这样层层森严的判断机制,其更新迭代的周期肯定会很长,可以达到十年。
四、Apollo开源模块讲解—3
这节课,我们就讲解一下Apollo本身,当然Apollo并不是登月计划的那个阿波罗,而是百度旗下创建的无人驾驶汽车先锋。那么我们为什么叫阿波罗呢?我觉得是受美国总统肯尼迪的一句话影响,那就是我们所做的事情并不是因为简单才去做的,而是因为不简单才去做的。
好了讲到这里让我们先来看看Apollo发布的无人驾驶1.0技术框架图:
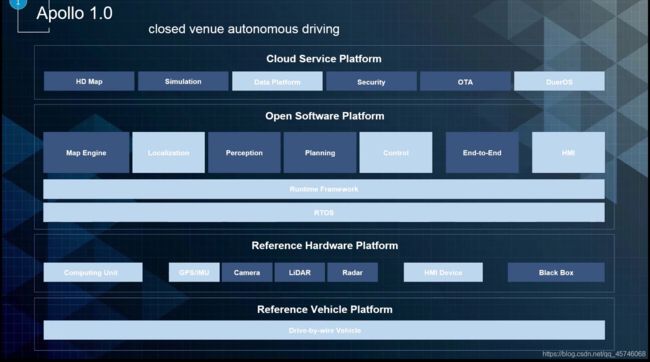
*(首先这个图一共有四层,最下面的一次代表线控,也就是说所有的模块都是装在一辆线控的汽车上。上一层就是计算过程,也就是搭载在计算机芯片上的算法计算过程。下面的这两层是硬件方面,因为百度不做车,所以我们就召集兄弟们一起来玩。于是就签订了许多汽车工厂来和我们一起开发。
上面的两层就是百度的一个优势所在了,第二层是一个开发的软件开源平台,有能力大家都可以去优化和开发,并不局限于一个汽车企业,所以这是百度的巧妙之处。第一层就是云端与无人车交互的这么一个功能模块,也是很重要的一部分。
当然可以回顾一下上面的图形,点亮的条形框格就是Apollo1.0所承载的功能。
可以点击我查看百度Apollo1.0形象片介绍影片
看完了两分钟的影片,相信你已经热血沸腾,那么就让我们继续了解Apollo1.5版本的内容吧。

可以看到,相对于1.0来说1.5已经在基础之上添加了很多零件了,那么汽车的处理能力肯定有很大幅度的提高。接着Apollo2.0就产生了:
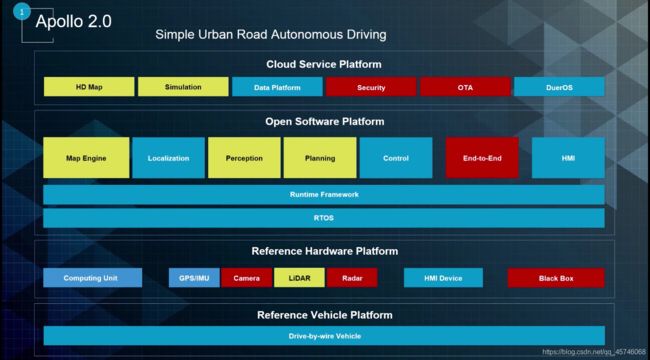
可以看到,基本上2.0就已经点亮了所有的无人驾驶相关模块,但是仍然有许多地方需要补充和增进的。

但是3.0的发布却给百度带来了里程碑式的进步,可以看到3.0第一层添加了量产解决方案,就是我们所说的商业量产化,这就相对于我们迈出了商业化应用的关键一步。而且相关平台也做出了升级,我们的目标是进一步推进无人技术的发展,让我们一起携手共建美好时代吧。
本次课程到此就终于结束了,希望大家有所收获。