Ti的C28x系列的DSP(28069)(28377D)使用经验,PWM经验
笔者之前从事的是电力电子行业,如果说ADC是整个逆变器的输入,那么PWM就可以说是整个逆变器的输出了。在ADC与PWM之间,就是数据处理和算法了。
笔者百度了下,脉宽调制(PWM)基本的原理:控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替正弦波或所需要的波形。
一般工程的底层代码搭建好之后,大部分应用程序中用到的PWM功能可以用以下三个函数表示:
-
修改PWM占空比、周期
typedef struct{
Uint16 TBPRD7;
Uint16 TBPRD8;
Uint16 TBPRD9;
Uint16 TBPRD10;
Uint16 TBPRD11;
Uint16 TBPRD12;
Uint16 CmpA7;
Uint16 CmpA8;
Uint16 CmpA9;
Uint16 CmpA10;
Uint16 CmpA11;
Uint16 CmpA12;
}PwmData;
void PwmManage(PwmData*data)
{
EPwm7Regs.TBPRD = data->TBPRD7;
EPwm8Regs.TBPRD = data->TBPRD8;
EPwm9Regs.TBPRD = data->TBPRD9;
EPwm10Regs.TBPRD = data->TBPRD10;
EPwm11Regs.TBPRD = data->TBPRD11;
EPwm12Regs.TBPRD = data->TBPRD12;
EPwm7Regs.CMPA.bit.CMPA = data->CmpA7;
EPwm8Regs.CMPA.bit.CMPA = data->CmpA8;
EPwm9Regs.CMPA.bit.CMPA = data->CmpA9;
EPwm10Regs.CMPA.bit.CMPA = data->CmpA10;
EPwm11Regs.CMPA.bit.CMPA = data->CmpA11;
EPwm12Regs.CMPA.bit.CMPA = data->CmpA12;
}
-
释放PWM
void PwmEnable(void)
{
EALLOW;
EPwm1Regs.TZCLR.bit.OST = 1;
EPwm2Regs.TZCLR.bit.OST = 1;
EPwm3Regs.TZCLR.bit.OST = 1;
EPwm4Regs.TZCLR.bit.OST = 1;
EPwm5Regs.TZCLR.bit.OST = 1;
EPwm6Regs.TZCLR.bit.OST = 1;
EPwm7Regs.TZCLR.bit.OST = 1;
EPwm8Regs.TZCLR.bit.OST = 1;
EPwm9Regs.TZCLR.bit.OST = 1;
EPwm10Regs.TZCLR.bit.OST = 1;
EPwm11Regs.TZCLR.bit.OST = 1;
EPwm12Regs.TZCLR.bit.OST = 1;
EDIS;
}
-
闭锁PWM
void PwmDisable(void)
{
EALLOW;
EPwm1Regs.TZFRC.bit.OST = 1;
EPwm2Regs.TZFRC.bit.OST = 1;
EPwm3Regs.TZFRC.bit.OST = 1;
EPwm4Regs.TZFRC.bit.OST = 1;
EPwm5Regs.TZFRC.bit.OST = 1;
EPwm6Regs.TZFRC.bit.OST = 1;
EPwm7Regs.TZFRC.bit.OST = 1;
EPwm8Regs.TZFRC.bit.OST = 1;
EPwm9Regs.TZFRC.bit.OST = 1;
EPwm10Regs.TZFRC.bit.OST = 1;
EPwm11Regs.TZFRC.bit.OST = 1;
EPwm12Regs.TZFRC.bit.OST = 1;
EDIS;
}上面代码中释放与闭锁PWM的功能是由软件TRIP实现的。
以上三个函数基本在两电平或者三电平逆变器上用的比较多,除此之外PWM还有很多其他功能,接下来笔者慢慢列举。
-
PWM启动ADC
这是一个比较常用的功能,基本上如果使用DSP的片内ADC,大部分都会用PWM触发ADC,或者外部中断启动ADC。
PWM启动ADC,主要是考虑启动ADC的周期,常规的做法启动ADC转换的周期就是PWM的周期,这种做法适用于PWM周期比较长的情况下,如果PWM周期比较短,可能需要隔好几个PWM周期,再启动一次ADC转换。
//ADC SOC
EPwm1Regs.ETSEL.bit.SOCAEN = 1; // Enable SOC on A group
EPwm1Regs.ETSEL.bit.SOCASEL = 1; // When TBCTR == 0x0000,EPWMxSOCA pulse will be
//generated
EPwm1Regs.ETPS.bit.SOCAPRD = 1; // Generate pulse on 1st event-
PWM触发中断
一般DSP系统中的主中断,都是ADC转换完成后触发的主中断,因为大部分的应用需求,都是希望DSP进入主中断后能够读取ADCRESULT,所以采用ADC触发的中断,一点都不浪费时间。
但有人认为ADC是个不稳定的东西,他们认为ADC转换过程中有机率出现问题,这种情况下,会导致系统无法进入主中断,而产生一系列问题?所以也有人用PWM的CMPB触发的中断作为主中断,但CMPB要在ADC转换完成之后才能触发中断,,这是为了进入主中断后读取的ADCRESULT,是当前周期转换的,而不是上个周期的。
EPwm1Regs.ETSEL.bit.INTSEL = 6; // time-base counter equal to
//CMPB when the timer
//is incrementin
EPwm1Regs.ETPS.bit.INTPRD = 1; // Generate interrupt on 1st event
EPwm1Regs.CMPB = 1000; -
PWM的TRIP模块
TRIP这个词,不好翻译,暂时还是用英文吧,笔者也没有看过特别合适的中文翻译,PWM的TRIP模块,主要功能是关系到PWM的释放与闭锁,闭锁一般是使PWM的A、B 引脚输出低电平。
然后TRIP分为硬件TRIP、软件TRIP,这两者实现的功能是相同的,只是触发TRIP事件的源头不同。硬件TRIP事件是怎么产生的,把DSP的一个GPIO设置为TRIP引脚,当该引脚的电平被拉低时,立即产生TRIP事件,此时PWM即会被闭锁。硬件TRIP闭锁PWM的速度很快,软件闭锁,可能至少需要几十us或者一个中断周期才能够闭锁PWM。
软件TRIP就是实现人为的闭锁、释放PWM功能。
EPwm1Regs.TZSEL.bit.OSHT1 = 1; // one-shit
EPwm1Regs.TZCTL.bit.TZA = TZ_FORCE_LO; //Force EPWMxA to a low state
EPwm1Regs.TZCTL.bit.TZB = TZ_FORCE_LO; // Force EPWMxB to a low state
-
PWM的脉冲同步性
PWM的同步性,主要是针对各个PWM模块而说的,比如PWM1与PWM12模块,希望这两个PWM模块的脉冲能够同步,这里同步就是指两者的波形能够重合,没有us级的差别。
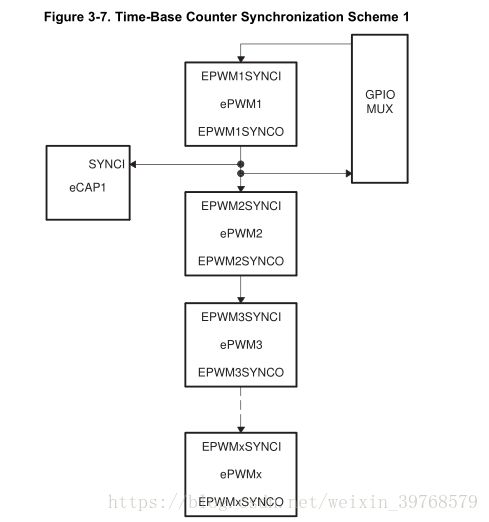
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Master module
EPwm1Regs.TBCTL.bit.SYNCOSEL = TB_CTR_ZERO; // Sync down-stream module
-
PWM的引脚输出模式
一个PWM模块有PWM_A引脚,也有PWM_B引脚,这两个引脚的输出模式可以设置为互补模式,也可以设置为独立模式。
//独立模式
EPwm1Regs.AQCTLA.bit.CAD = AQ_SET; //大于比较值为0,小于比较值为1
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.CBD = AQ_SET;
EPwm1Regs.AQCTLB.bit.CBU = AQ_CLEAR;
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HI;
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_DISABLE;
//互补模式
EPwm1Regs.AQCTLA.bit.CAD = AQ_SET; //大于比较值为0,小于比较值为1
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR;
EPwm1Regs.AQCTLB.bit.CBD = AQ_NO_ACTION;
EPwm1Regs.AQCTLB.bit.CBU = AQ_NO_ACTION;
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC;
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE;
-
PWM的相位
不同PWM模块之间的相位,可以同步,也可以相互错开,这种模式笔者测试过,还没有正式在项目中使用过,这种模式的设置应该和PWM的相位寄存器设置有关。
-
PWM的死区
// Active Low PWMs - Setup Deadband
EPwm1Regs.DBCTL.bit.OUT_MODE = DB_FULL_ENABLE; //
EPwm1Regs.DBCTL.bit.POLSEL = DB_ACTV_HIC; //DB_ACTV_HIC
EPwm1Regs.DBCTL.bit.IN_MODE = DBA_ALL; //EPWMxA In (from the action-qualifier) is the
//source for both falling-edge and rising-edge delay
EPwm1Regs.DBRED = 400;
EPwm1Regs.DBFED = 400; // TBCLK = SYSCLK 5.00 μS