CNN知识点整理
其中1*1卷积核的作用摘抄自https://blog.csdn.net/briblue/article/details/83151475
以下整理刚刚学习的CNN的一些知识点:
一、Input layer:
一般输入数据都会进行一些预处理,常见的有以下步骤(图像处理中):
1)去均值:把输入数据各个维度都中心化到0
2)归一化:幅度归一化到同样的范围
3)PCA/whitening:用PCA降维,去除特征之间的相关性;白化是对数据每个特征轴上的幅度归一化。
以下两幅图分别帮助理解这三个操作含义。


二、convolutional layer
图像本身具有局部特性。

为什么卷积核有效?
通过图2可以看出,通过第一个卷积核计算后的feature map是一个三维数据,在第三列的绝对值最大,说明原始图片上对应的地方有一条垂直方向的特征;而通过第二个卷积核计算后,第三列的数值为0,第二行的数值绝对值最大,说明原始图片上对应的地方有一条水平方向的特征。可以看出,我们设计的两个卷积核分别能够提取/检测出原始图片的特定的特征。此时我们可以把卷积核理解为特征提取起。每个卷积核可以看作一个特征提取起,不同的卷积核负责提取不同的特征。所以,我们只要把图片数据灌进去,设计好卷积核的尺寸、数量和滑动的步长就可以自动提取出图片的某些特征,从而达到分类效果。
三、activation layer
1) sigmoid

sigmoid函数的缺点:i: 当输入稍微远离了坐标原点,函数的梯度就变得很小了,几乎为零。在神经网络反向传播过程中,我们都是通过微分的链式法则来计算各个权重w的微分的。当反向传播经过了sigmoid函数,这个链条上的微分就很小很小了,况且还可能经过很多个sigmoid函数,最后导致权重w对损失函数几乎没有影响,这样不利用权重的优化,这个问题叫梯度饱和,也叫梯度弥散。
ii: 函数输出不是以0为中心的,这样会使权重更新效率降低。
iii: sigmoid函数要进行指数运算,这个对于计算机来说是比较慢的。
2)Tanh函数

和sigmoid相似的缺点:在输入很大或很小的时候,输出都几乎平滑,梯度很小,不利于权值更新。
相比sigmoid的优点:输出在(-1,1)。中心点在坐标原点,相对对称,叠加后依旧相对对称。
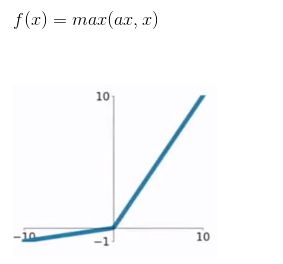
3)ReLu函数

相比于sigmoid和tanh函数的优点:
i: 在输入正数的时候,不存在梯度饱和问题。
ii: 收敛快,求梯度简单,计算速度快。
relu函数的缺点:当输入是负数的时候,relu是完全不被激活的,这就表明一旦输入了负数,relu就会死掉。这个在前向传播过程中,还不算什么问题,有的区域是敏感的,有的是不敏感的。但是到了反向传播过程中,输入负数,梯度就会完全到0,产生梯度饱和(梯度弥散)的问题。
而且relu也不是以0为中心的函数。
4)Leaky Relu
不会饱和/挂掉,计算也很快。
5)指数线性单元ELU

相比于relu,在输入负数的时候,是有一定的输出的,而且这部分输出还有一定的抗干扰能力。这样可以消除relu死掉的问题,不过还是会有梯度饱和和指数运算的问题。
四、pooling layer
压缩数据和参数的量,减小过拟合。
五、CNN之优缺点:
优点:共享卷积核,对高维数据处理无压力;
无需手动选取特征,训练好权重,即得特征;
分类效果好。
缺点:需要调参,需要大量样本,训练最好用GPU;
物理含义不明确。
六、CNN之fine-tuning
何谓fine-tuning: 使用已用于其他目标,预训练好模型的权重或者部分权重,作为初始值开始训练。。
原因:自己从头训练CNN容易出现问题。
fine-tuning能很快收敛到一个较理想的状态。
做法:复用相同层的权重,新定义层取随机权重初始值。调大新定义层的学习率,调小复用层的学习率。
七、CNN中1*1卷积核的作用
1) 增加网络的深度。
这涉及到感受野的问题,我们知道卷积核越大,它生成的feature map上单个节点的感受野就越大,随着网络深度的增加,越靠后的feature map上的节点感受野也越大。因此特征也越来越抽象。
但有的时候,我们想在不增加感受野的情况下,让网络加深,为的就是引入更多的非线性。
我们知道,卷积后生成图片的尺寸受卷积核的大小和跨度影响,但如果卷积核是1*1,跨度也是1,那么生成后的图像大小就没有变化。但通常一个卷积过程包括一个激活函数,比如sigmoid和relu。
所以在输入尺寸不发生变化的情况下,却引入了更多的非线性,浙江增强神经网络的表达能力。
2)升维或者降维
卷积后的feature map通道数是与卷积核的个数相同的。
如果输入图片通道是3,卷积核的数量是6,那么生成的feature map通道数就是6,这就是升维;如果卷积核的数量是1,那么生成的feature map只有1个通道,这就是降维。
为什么要用1*1呢?
原因就是数据量的大小,我们知道在训练的时候,卷积核里面的值就是训练的权重,3*3的尺寸是1*1所需内存的9倍,,其它的类似。所以,有时候根据实际情况只想单纯的去提升或者降低feature map的通道,1*1无疑是一个值得考虑的选项。