Android Update Engine分析(三)客户端进程
Android Update Engine分析(三)客户端进程
技术文章直入主题,展示结论,容易让人知其然,不知其所以然。
我个人更喜欢在文章中展示如何阅读代码,逐步分析解决问题的思路和过程。这样的思考比知道结论更重要,希望我的分析能让你有所收获。
前面两篇分别分析了Makefile,Protobuf和AIDL相关文件,从本篇开始正式深入功能实现的代码文件去探究Update Engine。
首先从Update Engine最简单的部分,客户端进程update_engine_client入手。
1. update_engine_client的文件依赖
Android自带的update_engine客户端update_engine_client应用很简单,只涉及到几个代码文件。
依赖的文件:
update_engine_client
--> files (
binder_bindings/android/os/IUpdateEngine.aidl
binder_bindings/android/os/IUpdateEngineCallback.aidl
common/error_code_utils.cc
update_engine_client_android.cc
update_status_utils.cc
)
--> shared libraries (
libbrillo-stream
libbrillo
libchrome
libbinder
libbinderwrapper
libbrillo-binder
libutils
)这里可以看到,Android自带的客户端demo进程update_engine_client的依赖比较简单,代码设计的文件比较少。
2. update_engine_client代码分析
2.1 命令行参数
在开始逐行分析代码前,我们来看看这个客户端都有哪些参数和功能。
我们在命令行运行update_engine_client --help,其输出如下:
bcm7252ssffdr4:/ # update_engine_client --help
Android Update Engine Client
--cancel (Cancel the ongoing update and exit.) type: bool default: false
--follow (Follow status update changes until a final state is reached. Exit status is 0 if the update succeeded, and 1 otherwise.) type: bool default: false
--headers (A list of key-value pairs, one element of the list per line. Used when --update is passed.) type: string default: ""
--help (Show this help message) type: bool default: false
--offset (The offset in the payload where the CrAU update starts. Used when --update is passed.) type: int64 default: 0
--payload (The URI to the update payload to use.) type: string default: "http://127.0.0.1:8080/payload"
--reset_status (Reset an already applied update and exit.) type: bool default: false
--resume (Resume a suspended update.) type: bool default: false
--size (The size of the CrAU part of the payload. If 0 is passed, it will be autodetected. Used when --update is passed.) type: int64 default: 0
--suspend (Suspend an ongoing update and exit.) type: bool default: false
--update (Start a new update, if no update in progress.) type: bool default: false我们在《Android A/B System OTA分析(四)系统的启动和升级》中有提到一个具体的升级场景,调用参数如下:
bcm7252ssffdr4:/ # update_engine_client \
--payload=http://stbszx-bld-5/public/android/full-ota/payload.bin \
--update \
--headers="\
FILE_HASH=ozGgyQEcnkI5ZaX+Wbjo5I/PCR7PEZka9fGd0nWa+oY= \
FILE_SIZE=282164983
METADATA_HASH=GLIKfE6KRwylWMHsNadG/Q8iy5f7ENWTatvMdBlpoPg= \
METADATA_SIZE=21023 \
"2.2 代码分析
在开始代码逐行分析之前,通过检查类UpdateEngineClientAndroid的定义,我画了一个类图,便于查看各个类之间的关系:
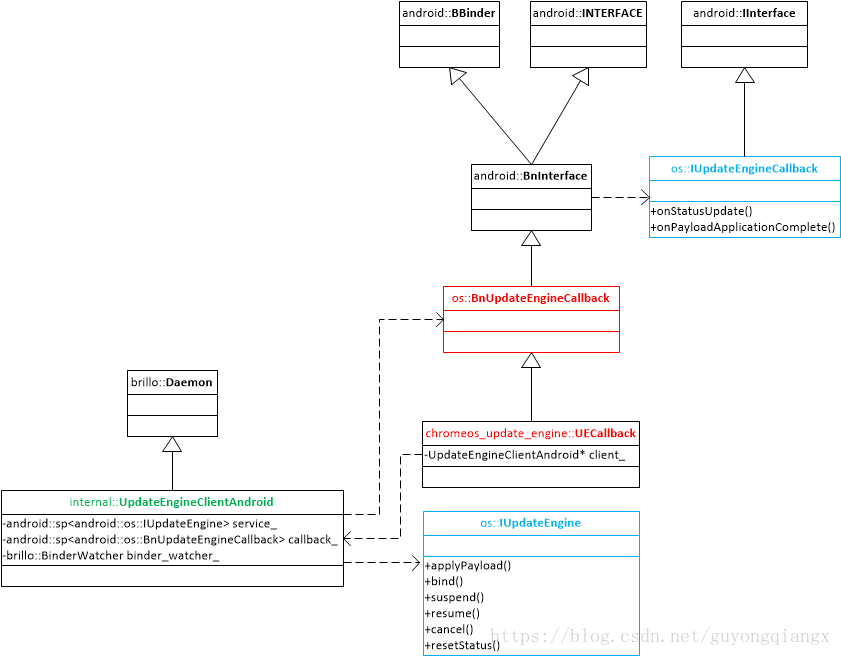
图1. UpdateEngineClientAndroid类图
下面从update_engine_client入口main函数开始分析:
# system\update_engine\update_engine_client_android.cc
int main(int argc, char** argv) {
chromeos_update_engine::internal::UpdateEngineClientAndroid client(
argc, argv);
return client.Run();
}这个main函数真是简单,就两句话,先初始化生成一个UpdateEngineClientAndroid对象client,然后执行对象client.Run()方法~~
纳尼?这就结束了?这就是update_engine_client的全部?
先看看UpdateEngineClientAndroid的初始化:
# system\update_engine\update_engine_client_android.cc
class UpdateEngineClientAndroid : public brillo::Daemon {
public:
// 用传入的参数argc, argv初始化私有成员变量argc_, argv_
UpdateEngineClientAndroid(int argc, char** argv) : argc_(argc), argv_(argv) {
}
...
private:
// 下面定义了私有成员变量argc_和argv_用于存放main函数接收到的参数
// Copy of argc and argv passed to main().
int argc_;
char** argv_;
...
}紧接着调用client.Run(),这个方法在UpdateEngineClientAndroid的父类中定义:
# external\libbrillo\brillo\daemons\daemon.h
class BRILLO_EXPORT Daemon : public AsynchronousSignalHandlerInterface {
public:
...
// Performs proper initialization of the daemon and runs the message loop.
// Blocks until the daemon is finished. The return value is the error
// code that should be returned from daemon's main(). Returns EX_OK (0) on
// success.
virtual int Run();
...
protected:
...
virtual int OnInit();
}实现上,由于这里Run()定义为virtual虚函数,所以运行时会先执行子类的同名函数UpdateEngineClientAndroid::Run(),但这里子类UpdateEngineClientAndroid并没有定义Run()函数,所以会执行父类brillo::Daemon的Run()函数,如下:
# external\libbrillo\brillo\daemons\daemon.cc
int Daemon::Run() {
// 1. 执行OnInit函数进行初始化
int exit_code = OnInit();
if (exit_code != EX_OK)
return exit_code;
// 2. 初始化完成后调用brillo_message_loop_.Run()进入消息循环处理模式
brillo_message_loop_.Run();
// 3. 调用OnShutdown
OnShutdown(&exit_code_);
// 4. 进入while循环等待退出消息
// base::RunLoop::QuitClosure() causes the message loop to quit
// immediately, even if pending tasks are still queued.
// Run a secondary loop to make sure all those are processed.
// This becomes important when working with D-Bus since dbus::Bus does
// a bunch of clean-up tasks asynchronously when shutting down.
while (brillo_message_loop_.RunOnce(false /* may_block */)) {}
return exit_code_;
}这里先后有4个操作:
1. 执行OnInit函数进行初始化
2. 初始化完成后调用brillo_message_loop_.Run()进入消息循环处理模式
3. 调用OnShutdown
4. 进入while循环等待退出消息
下面逐个来看这4个操作:
1. 执行OnInit函数进行初始化
由于int Daemon::OnInit()定义为虚函数:
# external\libbrillo\brillo\daemons\daemon.h
class BRILLO_EXPORT Daemon : public AsynchronousSignalHandlerInterface {
...
protected:
// 定义了OnInit为虚函数,运行时如果子类实现了OnInit,则执行的是子类的OnInit函数
virtual int OnInit();
}所以运行时执行的是Daemon对应子类UpdateEngineClientAndroid的OnInit()函数,如下:
# system\update_engine\update_engine_client_android.cc
int UpdateEngineClientAndroid::OnInit() {
// 这里在子类中调用父类的OnInit操作,注册信号SIGTERM, SIGINT和SIGHUP的处理函数
int ret = Daemon::OnInit();
if (ret != EX_OK)
return ret;这里先调用父类的Daemon::OnInit()函数,
# external\libbrillo\brillo\daemons\daemon.cc
int Daemon::OnInit() {
async_signal_handler_.Init();
for (int signal : {SIGTERM, SIGINT}) {
async_signal_handler_.RegisterHandler(
signal, base::Bind(&Daemon::Shutdown, base::Unretained(this)));
}
async_signal_handler_.RegisterHandler(
SIGHUP, base::Bind(&Daemon::Restart, base::Unretained(this)));
return EX_OK;
}这里Daemon::OnInit()也没有做什么特别的,就是调用RegisterHandler注册了两个信号SIGTERM和SIGINT的handler,即Daemon::Shutdown和Daemon::Restart,但这两个handler其实是空的,什么都没做,如下:
# external\libbrillo\brillo\daemons\daemon.cc
void Daemon::OnShutdown(int* /* exit_code */) {
// Do nothing.
}
bool Daemon::OnRestart() {
// Not handled.
return false; // Returning false will shut down the daemon instead.
}然后通过DEFINE_bool定义了一组参数:
// 定义"update"参数,bool类型,默认为false
DEFINE_bool(update, false, "Start a new update, if no update in progress.");
// 定义"payload"参数, string类型
DEFINE_string(payload,
"http://127.0.0.1:8080/payload",
"The URI to the update payload to use.");
// 定义"offset"参数,int64类型
DEFINE_int64(offset, 0,
"The offset in the payload where the CrAU update starts. "
"Used when --update is passed.");
// 定义"size"参数,int64类型
DEFINE_int64(size, 0,
"The size of the CrAU part of the payload. If 0 is passed, it "
"will be autodetected. Used when --update is passed.");
// 定义"headers"参数,字符串类型
DEFINE_string(headers,
"",
"A list of key-value pairs, one element of the list per line. "
"Used when --update is passed.");
// 定义"suspend"参数,bool类型,默认为false
DEFINE_bool(suspend, false, "Suspend an ongoing update and exit.");
// 定义"resume"参数,bool类型,默认为false
DEFINE_bool(resume, false, "Resume a suspended update.");
// 定义"cancel"参数,bool类型,默认为false
DEFINE_bool(cancel, false, "Cancel the ongoing update and exit.");
// 定义"reset_status"参数,bool类型,默认为false
DEFINE_bool(reset_status, false, "Reset an already applied update and exit.");
// 定义"follow"参数,bool类型,默认为false
DEFINE_bool(follow,
false,
"Follow status update changes until a final state is reached. "
"Exit status is 0 if the update succeeded, and 1 otherwise.");
// 用argc_, argv_初始化命令行解析器
// Boilerplate init commands.
base::CommandLine::Init(argc_, argv_);
// 我的理解是在这里解析argc_和argv_参数,如果不带参数,则显示错误并返回
brillo::FlagHelper::Init(argc_, argv_, "Android Update Engine Client");
if (argc_ == 1) {
LOG(ERROR) << "Nothing to do. Run with --help for help.";
return 1;
}
// 检查位置参数,没有详细去看,但不影响对整体的理解
// Ensure there are no positional arguments.
const std::vector positional_args =
base::CommandLine::ForCurrentProcess()->GetArgs();
if (!positional_args.empty()) {
LOG(ERROR) << " Found a positional argument '" << positional_args.front()
<< "'. If you want to pass a value to a flag, pass it as "
"--flag=value.";
return 1;
}参考2.1节的命令行参数,显然,命令行处理选项将宏DEFINE_xxx展开,最终得到FLAGS_xxx变量,因此命令行选项和生成的FLAGS_xxx变量的对应关系为:
update–>FLAGS_update,payload–>FLAGS_payload,offset–>FLAGS_offset,size–>FLAGS_size,headers–>FLAGS_headers,suspend–>FLAGS_suspend,resume–>FLAGS_resume,cancel–>FLAGS_cancel,reset_status–>FLAGS_reset_status,follow–>FLAGS_follow
我没有深入看过base::CommandLine和brillo::FlagHelper类,从网上的介绍看是进行命令行处理的,从后面的操作看,这里应该是对argc_, argv_里面包含的命令行参数进行解析。
联想到我们命令行调用的操作:
bcm7252ssffdr4:/ # update_engine_client \
--payload=http://stbszx-bld-5/public/android/full-ota/payload.bin \
--update \
--headers="\
FILE_HASH=ozGgyQEcnkI5ZaX+Wbjo5I/PCR7PEZka9fGd0nWa+oY= \
FILE_SIZE=282164983
METADATA_HASH=GLIKfE6KRwylWMHsNadG/Q8iy5f7ENWTatvMdBlpoPg= \
METADATA_SIZE=21023 \
"所以这里有:
FLAGS_payload: "http://stbszx-bld-5/public/android/full-ota/payload.bin"
FLAGS_update: true
FLAGS_headers: "FILE_HASH=ozGgyQEcnkI5ZaX+Wbjo5I/PCR7PEZka9fGd0nWa+oY= \
FILE_SIZE=282164983
METADATA_HASH=GLIKfE6KRwylWMHsNadG/Q8iy5f7ENWTatvMdBlpoPg= \
METADATA_SIZE=21023"分析完命令行选项解析后,继续查看后面的代码:
bool keep_running = false;
// 初始化Log操作
brillo::InitLog(brillo::kLogToStderr);
// Initialize a binder watcher early in the process before any interaction
// with the binder driver.
// binder_watcher_的初始化,对`binder_watcher_`具体作用还不太了解,这里先不做深入。
binder_watcher_.Init();接下来获取"android.os.UpdateEngineService"服务,并将其代理对象存放到service_中,可以简单理解为所有UpdateEngineService服务的操作都可以调用service_成员的相应方法来实现。
// 获取名为"android.os.UpdateEngineService"的服务对象
android::status_t status = android::getService(
android::String16("android.os.UpdateEngineService"), &service_);
// 服务获取失败,提示错误并退出
if (status != android::OK) {
LOG(ERROR) << "Failed to get IUpdateEngine binder from service manager: "
<< Status::fromStatusT(status).toString8();
return ExitWhenIdle(1);
}剩下的就是将命令行update_engine_client提供的各种操作,如suspend, resume, cancel, reset_status, follow, update通过代理对象service_通知服务进程UpdateEngineService。
// 调用服务进程的"suspend"操作
if (FLAGS_suspend) {
return ExitWhenIdle(service_->suspend());
}
// 调用服务进程的"resume"操作
if (FLAGS_resume) {
return ExitWhenIdle(service_->resume());
}
// 调用服务进程的"cancel"操作
if (FLAGS_cancel) {
return ExitWhenIdle(service_->cancel());
}
// 调用服务进程的"resetStatus"操作
if (FLAGS_reset_status) {
return ExitWhenIdle(service_->resetStatus());
}
// 如果指定"follow"选项,则绑定回调操作UECallback
if (FLAGS_follow) {
// Register a callback object with the service.
callback_ = new UECallback(this);
bool bound;
if (!service_->bind(callback_, &bound).isOk() || !bound) {
LOG(ERROR) << "Failed to bind() the UpdateEngine daemon.";
return 1;
}
keep_running = true;
}
// 如果指定"update"操作,则解析"headers"参数
if (FLAGS_update) {
// 解析"headers",生成键值对列表
std::vector<std::string> headers = base::SplitString(
FLAGS_headers, "\n", base::KEEP_WHITESPACE, base::SPLIT_WANT_NONEMPTY);
std::vector前面几个suspend, resume, cancel和reset_status都比较直接,直接通过无参数调用service_->suspend(), service_->resume(), service_->cancel()和service_->resetStatus()通知服务进程UpdateEngineService。
对于follow操作,则生成一个UECallback对象,并通过service_->bind(callback_, &bound)将其绑定到UpdateEngineService服务端的IUpdateEngineCallback对象上。
对于update操作,
if (FLAGS_update) {
std::vector<std::string> headers = base::SplitString(
FLAGS_headers, "\n", base::KEEP_WHITESPACE, base::SPLIT_WANT_NONEMPTY);
std::vector这里先将FLAGS_headers按照换行符”\n“进行拆分,并存放到headers中,
然后将headers的每一项通过push_back操作存放到容器and_headers中。
可以简单理解为将headers操作的每一行对分别存放到容器and_header中,这样and_header中的每一项都是一个键值对字符串:
FILE_HASH=ozGgyQEcnkI5ZaX+Wbjo5I/PCR7PEZka9fGd0nWa+oY=
FILE_SIZE=282164983
METADATA_HASH=GLIKfE6KRwylWMHsNadG/Q8iy5f7ENWTatvMdBlpoPg=
METADATA_SIZE=21023然后将payload, offset, size参数和解析得到的and_headers一并传递给service_->applyPayload()方法,此时服务端UpdateEngineService进程会调用applyPayload进行升级更新。
如果service_->applyPayload()调用操作失败,则调用ExitWhenIdle(status)并退出:
if (!status.isOk())
return ExitWhenIdle(status);由于follow状态需要一直跟踪server端的状态,因此要求一直运行,但除follow操作外的其它操作,在执行完后就完成了,不再需要继续执行,所以如果keep_runing为false,则退出:
if (!keep_running)
return ExitWhenIdle(EX_OK);接下来就是client运行在follow状态才出现的情况了?需要一直follow到永远吗?原则上是的。但是如果server端挂掉了,再follow就没有意义了,所以注册一个事件来检查server端是否已经挂掉:
// When following updates status changes, exit if the update_engine daemon
// dies.
android::BinderWrapper::Create();
android::BinderWrapper::Get()->RegisterForDeathNotifications(
android::os::IUpdateEngine::asBinder(service_),
base::Bind(&UpdateEngineClientAndroid::UpdateEngineServiceDied,
base::Unretained(this)));
return EX_OK;
}对OnInit()函数总体描述如下:
1. 解析可执行程序的命令行参数
2. 根据命令行参数指定的操作,调用服务端的相应接口
3. 如果是follow操作,则向服务端注册callback的客户端调用接口callback_
4. 如果是update操作,则解析payload的相关参数,并将其传递给服务端的service_->applyPayload操作
5. 对于follow操作,客户端需要一直跟踪服务端update_engine状态,如果update_engine进程退出了,那客户端也需要收到通知并退出
回到client.Run()实际执行的Daemon::Run()函数,其实会发现除了前面分析的OnInit函数,剩下的就很简单了:
# external\libbrillo\brillo\daemons\daemon.cc
int Daemon::Run() {
int exit_code = OnInit();
if (exit_code != EX_OK)
return exit_code;
brillo_message_loop_.Run();
OnShutdown(&exit_code_);
// base::RunLoop::QuitClosure() causes the message loop to quit
// immediately, even if pending tasks are still queued.
// Run a secondary loop to make sure all those are processed.
// This becomes important when working with D-Bus since dbus::Bus does
// a bunch of clean-up tasks asynchronously when shutting down.
while (brillo_message_loop_.RunOnce(false /* may_block */)) {}
return exit_code_;
}完成OnInit()操作后,如果OnInit返回了非EX_OK值,说明操作失败,直接退出程序。
成功执行OnInit()操作后,进程调用brillo_message_loop_.Run()来循环处理消息。
3. 总结
分析完update_engine_client的代码,我们发现整个操作还是比较简单,一句话总结如下:
update_engine_client解析命令行的各种操作(suspend/resume/cancel/reset_status/follow/update),并将这些操作和参数通过binder机制,转发为对服务端进程UpdateEngineService相应操作的调用。
所以,剩下的事就是根据update_engine_client的各种操作和传入参数,分析服务端进程UpdateEngineService的行为。
4. 联系和福利
个人微信公众号“洛奇看世界”,一个大龄码农的救赎之路。
- 公众号回复关键词“Android电子书”,获取超过150本Android相关的电子书和文档。电子书包含了Android开发相关的方方面面,从此你再也不需要到处找Android开发的电子书了。
- 公众号回复关键词“个人微信”,获取个人微信联系方式。我组建了一个Android OTA的讨论组,联系我,说明Android OTA,拉你进组一起讨论。
