main() 函数解析(一)——Linux-0.11 剖析笔记(六)
文章目录
- 1. 宏定义`_syscall0`
- 2. `setup.s`读取的参数
- 3. 读取CMOS实时时钟信息
- 3.1 `outb_p(value,port)`
- 3.2 `inb_p(port)`
- 3.3 `outb(value,port)`和`inb(port)`
- 3.4 CMOS与RTC
- 3.5 time_init函数
- 4. main函数
- 4.1 根设备号
- 4.2 复制硬盘参数表
- 4.3 计算主内存起始位置
- 4.4 虚拟盘
- 4.5 `mem_init`函数
- 4.6 `trap_init`函数
- 4.6.1 `set_trap_gate(n,addr) `
- 4.6.2 `idt`数组
- 4.6.3 `set_system_gate(n,addr)`
说明:本文由旧文 main()函数解析(一) 修改而来,略有改动。
经过了前面的各种铺垫,终于来到了main函数。
1. 宏定义_syscall0
先说这几个内联函数
static inline _syscall0(int,fork)
static inline _syscall0(int,pause)
static inline _syscall1(int,setup,void *,BIOS)
static inline _syscall0(int,sync)
比如
static inline _syscall0(int,fork)
_syscall0()是在文件unistd.h中定义,它以内嵌汇编的形式调用 Linux 的系统调用中断 int 0x80。
系统调用(通常称为syscalls)是 Linux内核与上层应用程序进行交互通信的唯一接口。用户程序通过直接或间接(通过库函数)调用中断int 0x80(在eax寄存器中指定系统调用功能号),即可使用内核资源,包括系统硬件资源。
_syscall0()其实是一个宏,这个宏定义在include/unistd.h 文件第 133 行:
#define _syscall0(type,name) \
type name(void) \
{ \
long __res; \
__asm__ volatile ("int $0x80" \
: "=a" (__res) \
: "0" (__NR_##name)); \
if (__res >= 0) \
return (type) __res; \
errno = -__res; \
return -1; \
}
第 5 行:汇编语句,表示系统调用,产生软中断,0x80 号中断;
第 6 行:输出部分,"=a" 表示用寄存器 eax,当汇编语句执行后,把 eax 的值传给变量__res,作为返回值;
第 7 行:输入部分,“0” 表示和第 0 个输出变量有相同的约束,即使用寄存器 eax,把__NR_name的值赋给 eax,指明系统调用功能号;
第 8~9 行: 如果返回值 >=0,则直接返回该值;
第10~11行: 否则置出错号(errno 是全局变量),并返回-1。
内嵌汇编语法如下。对此不熟悉的朋友可以专门找资料学习,可以参考我的博文:
C 语言内联汇编介绍
__asm__(汇编语句模板: 输出部分: 输入部分: 破坏描述部分)
根据_syscall0()的宏定义,我们把static inline _syscall0(int,fork)展开,得到:
static inline int fork(void) { long __res; __asm__ volatile ("int $0x80" : "=a" (__res) : "0" (2)); if (__res >= 0) return (int) __res; errno = -__res; return -1; }
实际上展开结果就是上面一行。
可以手工展开,也可以用命令展开。用命令展开的方法是:
首先进入到 Linux-0.11 源码路径下,比如~/oslab/linux-0.11,然后输入命令:
gcc -E init/main.c -o main.i -I./include
如果你还没有实验环境,那赶紧弄一个吧,方法是 Linux 0.11 实验环境搭建或者Linux 0.11 实验环境搭建与调试
以上的展开结果实在是太长了,分行写如下:
static inline int fork(void)
{
long __res;
__asm__ volatile ("int $0x80"
: "=a" (__res)
: "0" (2));
if (__res >= 0)
return (int) __res;
errno = -__res;
return -1;
}
第6行:括号里的“2”是因为在文件unistd.h中有#define __NR_fork 2,表示系统中断调用号。
gcc会把上述“函数”体中的语句直接插入到调用fork()语句的代码处,因此执行fork()不会引起函数调用。另外,宏名称字符串syscall0中最后的0 表示无参数,1表示带1个参数。如果系统调用带有1个参数,那么就应该使用宏_syscall1()。
2. setup.s读取的参数
/*
* This is set up by the setup-routine at boot-time
*/
#define EXT_MEM_K (*(unsigned short *)0x90002)
#define DRIVE_INFO (*(struct drive_info *)0x90080)
#define ORIG_ROOT_DEV (*(unsigned short *)0x901FC)
以上三行,右侧的地址其实是setup.s运行时,读取了一些参数,并保存到了相应位置。忘了的同学可以参考我的博文 bootsect.s 分析—— Linux-0.11 学习笔记(一)

-
EXT_MEM_K (0x9002):系统从 1MB 开始的扩展内存大小,以KB为单位; -
DRIVE_INFO (0x90080):硬盘参数表,包括第1个和第2个硬盘,共32字节; -
ORIG_ROOT_DEV:根文件系统所在的设备号3.
3. 读取CMOS实时时钟信息
#define CMOS_READ(addr) ({ \
outb_p(0x80|addr,0x70); \ // 把 (0x80|addr) 写入端口0x70
inb_p(0x71); \ // 读端口0x71
})
要想搞清楚上面的代码,就先要弄清楚outb_p和inb_p。outb_p和inb_p都是宏,在文件\include\asm\io.h中定义。
3.1 outb_p(value,port)
#define outb_p(value,port) \
__asm__ ("outb %%al,%%dx\n" \
"\tjmp 1f\n" \
"1:\tjmp 1f\n" \
"1:"::"a" (value),"d" (port))
功能:向端口 port 写值 value
注意:第4行和第5行开头的 “1:” 是标号。
第2行:把 al 的值写入端口 dx;
第3行:跳转到1处,即下一句;这样写是为了延时;
第4行:同第3行;
第5行:内联汇编的输入部分,port作为端口号,传给 edx; value作为要写入的值,传给 eax;
所以, outb_p(value,port)表示把value写入端口port.
3.2 inb_p(port)
#define inb_p(port) ({ \
unsigned char _v; \
__asm__ volatile ("inb %%dx,%%al\n" \
"\tjmp 1f\n" \
"1:\tjmp 1f\n" \
"1:":"=a" (_v):"d" (port)); \
_v; \
})
第3行:读端口 dx 到 al;
第4~5行:跳转到1处,即下一句;为了延时;
第 6 行分为两部分,输入部分是"d" (port),表示把端口号port传给edx;输出部分是"=a" (_v),表示把 eax 的值传给_v
第7行:_v 的值作为整个表达式的返回值。
所以, inb_p(port)表示读取端口port的值。
对于第 7 行,要说明一下,这种用法是可以的。
比如
int main(void)
{
int x = 10;
int y = 1;
int c = ({x;y;});
printf("c = %d\n",c);
}
第 5 行,这样写合法,结果输出 1
可以参考我的博文:C语言的复合语句表达式
3.3 outb(value,port)和inb(port)
#define outb(value,port) \
__asm__ ("outb %%al,%%dx"::"a" (value),"d" (port))
#define inb(port) ({ \
unsigned char _v; \
__asm__ volatile ("inb %%dx,%%al":"=a" (_v):"d" (port)); \
_v; \
})
既然都分析到这里了,那就把这两个宏也说了吧。这两个宏和上面的差不多,只不过不带延迟。
3.4 CMOS与RTC
PC 机的 CMOS 内存是由电池供电的 64 或 128 字节内存块,通常是系统实时钟芯片RTC (Real Time Chip) 的一部分。有些机器还有更大的内存容量。该 64 字节的CMOS原先在IBM PC-XT机器上用于保存时钟和日期信息,存放的格式是BCD码。由于这些信息仅用去 14 字节,因此剩余的字节就可用来存放一些系统配置数据。
CMOS的地址空间在基本地址空间之外。**要访问它需要通过端口 0x70、 0x71 进行。0x70 是地址端口,0x71 是数据端口。**为了读取指定偏移位置的字节,必须首先使用out指令向地址端口 0x70 发送指定字节的偏移位置值,然后使用in指令从数据端口 0x71 读取指定的字节信息。同样,对于写操作也需要首先向地址端口 0x70 发送指定字节的偏移值,然后把数据写到数据端口 0x71 中去。
outb_p(0x80|addr,0x70);把欲读取的字节地址(addr)与0x80进行或操作是没有必要的。因为那时的CMOS内存容量还没有超过128(=111_1111b)字节,因此不需要把b7设为1。之所以会有这样的操作是因为当时Linus手头缺乏有关CMOS方面的资料,CMOS中时钟和日期的偏移地址都是他逐步实验出来的,也许在他的实验中将偏移地址与0x80进行或操作(并且还修改了其他地方)后正好取得了所有正确的结果,因此他的代码中也就有了这步不必要的操作。不过从1.0版本之后,该操作就被去除了。
下表是 CMOS 内存信息的一张简表。
CMOS 64 字节信息简表

3.5 time_init函数
static void time_init(void)
{
struct tm time;
do {
time.tm_sec = CMOS_READ(0); // 秒
time.tm_min = CMOS_READ(2); // 分
time.tm_hour = CMOS_READ(4); // 时
time.tm_mday = CMOS_READ(7); // 日
time.tm_mon = CMOS_READ(8); // 月
time.tm_year = CMOS_READ(9); // 年(since 1900)
} while (time.tm_sec != CMOS_READ(0));
BCD_TO_BIN(time.tm_sec);
BCD_TO_BIN(time.tm_min);
BCD_TO_BIN(time.tm_hour);
BCD_TO_BIN(time.tm_mday);
BCD_TO_BIN(time.tm_mon);
BCD_TO_BIN(time.tm_year);
time.tm_mon--;
startup_time = kernel_mktime(&time);
}
结合上面的表格,6~11行非常好懂。
第12行:while (time.tm_sec != CMOS_READ(0));为什么有这个do-while循环呢?
CMOS的访问速度很慢。为了减小时间误差,在读取了所有数值后,若此时CMOS中秒值发生了变化,那么就重新读取所有值。这样内核就能把与CMOS时间误差控制在1秒之内。
注意,读取的值是BCD(Binary Coded Decimal)码格式。
BCD码:是一种十进制数字编码的形式。在这种编码下,每个十进制数字用一串单独的二进制比特来存储与表示。常见的有以4位表示1个十进制数字,称为压缩的BCD码(compressed or packed);或者以8位表示1个十进制数字,称为未压缩的BCD码(uncompressed or zoned)。
比如当前时间是10:35:20,那么读出的二进制数是:
0001_0000b:0011_0101b:0010_0000b
#define BCD_TO_BIN(val) ((val)=((val)&15) + ((val)>>4)*10)
// (val)&15 即 (val)&0xF, 得到个位数;
// (val)>>4)*10 把十位上的数字乘以10;
这个宏的作用是把BCD格式的值转换成二进制(或者说十进制,总之存到PC里都是二进制)
time.tm_mon--;
startup_time = kernel_mktime(&time);
第2行:调用函数kernel_mktime(),计算从 1970 年 1 月 1 日 0 时起到现在经过的秒数,作为开机时间,保存到全局变量startup_time 中。更具体的分析可以参考我的博文 kernel_mktime() 详解
4. main函数
void main(void) /* This really IS void, no error here. */
{ /* The startup routine assumes (well, ...) this */
/*
* Interrupts are still disabled. Do necessary setups, then
* enable them
*/
ROOT_DEV = ORIG_ROOT_DEV; //0x21C
drive_info = DRIVE_INFO;
memory_end = (1<<20) + (EXT_MEM_K<<10); //EXT_MEM_K = 0x3c00, memory_end = 0x100_0000
memory_end &= 0xfffff000; //0x100_0000 = 16M
if (memory_end > 16*1024*1024)
memory_end = 16*1024*1024;
if (memory_end > 12*1024*1024)
buffer_memory_end = 4*1024*1024; //buffer_memory_end = 4M
else if (memory_end > 6*1024*1024)
buffer_memory_end = 2*1024*1024;
else
buffer_memory_end = 1*1024*1024;
main_memory_start = buffer_memory_end; //4M
#ifdef RAMDISK_SIZE //=1025
main_memory_start += rd_init(main_memory_start, RAMDISK_SIZE*1024);
#endif
mem_init(main_memory_start,memory_end);
trap_init();
blk_dev_init();
chr_dev_init();
tty_init();
time_init();
sched_init();
buffer_init(buffer_memory_end);
hd_init();
floppy_init();
sti();
move_to_user_mode();
if (!fork()) { /* we count on this going ok */
init();
}
/*
* NOTE!! For any other task 'pause()' would mean we have to get a
* signal to awaken, but task0 is the sole exception (see 'schedule()')
* as task 0 gets activated at every idle moment (when no other tasks
* can run). For task0 'pause()' just means we go check if some other
* task can run, and if not we return here.
*/
for(;;) pause();
}
4.1 根设备号
ROOT_DEV = ORIG_ROOT_DEV;
ROOT_DEV 是什么? 在 fs/super.c 中,定义了 int ROOT_DEV = 0;
ORIG_ROOT_DEV 是什么?本文件内有宏定义
#define ORIG_ROOT_DEV (*(unsigned short *)0x901FC)
ROOT_DEV = ORIG_ROOT_DEV;这条语句执行后(依据我的实验环境),ROOT_DEV = 0x21C
在bootsect.s中,有
mov %cs:root_dev+0, %ax
cmp $0, %ax
jne root_defined
mov %cs:sectors+0, %bx
mov $0x0208, %ax # /dev/ps0 - 1.2Mb
cmp $15, %bx
je root_defined
mov $0x021c, %ax # /dev/PS0 - 1.44Mb, excute here when debug
cmp $18, %bx
je root_defined
undef_root:
jmp undef_root
root_defined:
mov %ax, %cs:root_dev+0
...
.org 508
root_dev:
.word ROOT_DEV !这里存放根文件系统所在设备号(init/main.c中会用)
这段代码的意思,可以参考我的博文 bootsect.s 解读——Linux-0.11 剖析笔记(二)
“确认根文件系统设备号” 这节
设备号 = 主设备号*256 + 次设备号(即 dev_no = (major << 8) + minor )
在 Linux 中软驱的主设备号是 2,次设备号 = type*4 + nr,其中 nr 为 0-3 分别对应软驱 A、B、C 或 D; type 是软驱的类型(2 表示1.2 MB 或 7 表示 1.44 MB 等)。
0x21C = 2<<8 + (7*4+0),所以根设备是 1.44M 的 A 驱动器。
4.2 复制硬盘参数表
第 9 行,drive_info = DRIVE_INFO;
本文件内有代码
#define DRIVE_INFO (*(struct drive_info *)0x90080)
...
struct drive_info { char dummy[32]; } drive_info;
用意是复制 0x90080 处的硬盘参数表
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tt1JtmY9-1596350698833)(pics/image-20200801084436199.png)]
4.3 计算主内存起始位置
本文件中有
#define EXT_MEM_K (*(unsigned short *)0x90002)
EXT_MEM_K 表示系统从 1MB 开始的扩展内存值,单位是 KB,所以要左移 10 位
memory_end = (1<<20) + (EXT_MEM_K<<10);
memory_end &= 0xfffff000; // 忽略不到 4KB(1页)的内存数
if (memory_end > 16*1024*1024) //如果内存超过16M,则按16M计
memory_end = 16*1024*1024;
if (memory_end > 12*1024*1024) //如果内存超过12M,则设置缓冲区末端=4M
buffer_memory_end = 4*1024*1024;
else if (memory_end > 6*1024*1024)//如果内存超过6M,则设置缓冲区末端=2M
buffer_memory_end = 2*1024*1024;
else
buffer_memory_end = 1*1024*1024;//否则设置缓冲区末端=1M
main_memory_start = buffer_memory_end; //主内存起始位置=缓冲区末端
注意,代码注释部分的值是我通过实验测试出来的,你的实验环境不一定是这个值。
第1行:计算出内存大小
第2行:忽略不到4KB的内存数
这里的缓冲区需要解释一下。
为了提高系统访问块设备的速度,内核在内存中开辟了一块高速缓冲区,将其划分为一个个与磁盘块大小相等的缓冲块来暂存与块设备之间的交换数据,以减少I/O操作的次数,提高系统的性能。缓冲块中保存着最近访问磁盘的数据,内核在读块设备之前先搜索缓冲区,如果数据在缓冲区中就不需要再从磁盘中读,否则向块设备发出读的指令。当内核写块设备时,先将数据写入缓冲区,什么时候将数据同步到块设备视具体情况而定,这样做是为了尽可能久地将数据停留在内存以减少对块设备的操作。
在我的环境中,通过单步调试,代码执行第6行,也就是说缓冲区末端(buffer_memory_end)在4M处,也就是主内存的起始位置(main_memory_start)。
4.4 虚拟盘
#ifdef RAMDISK
main_memory_start += rd_init(main_memory_start, RAMDISK*1024);
#endif
当 linux/Makefile文件中设置的RAMDISK值不为零时,表示系统会创建 RAM 虚拟盘设备。 在这种情况下,就会执行第2行,即主内存区的起始地址后移,也就是说主内存区头部还要划去一部分,供虚拟盘存放数据。
对于我的实验环境,Makefile 文件中有
RAMDISK = #-DRAMDISK=512
所以,虚拟盘的大小是0.5 * 1K * 1K = 0.5 M

如图所示,内核程序占据在物理内存的开始部分,接下来是供硬盘或软盘等块设备使用的高速缓冲区部分(其中要扣除显卡内存和 ROM BIOS 所占用的内存,它们的地址范围是 640KB~1MB)。
关于高速缓冲区:如前文所述,当一个进程需要读取块设备中的数据时,系统会首先把数据读到高速缓冲区中;当有数据需要写到块设备上时,系统也是先将数据放到高速缓冲区中,然后由块设备驱动程序写到相应的设备上。
内存的最后部分是供所有程序可以随时申请和使用的主内存区。内核程序在使用主内存区时,也同样先要向内核内存管理模块提出申请,在申请成功后方能使用。
对于含有 RAM 虚拟盘的系统,主内存区头部还要划去一部分,供虚拟盘存放数据。
long rd_init(long mem_start, int length)
{
int i;
char *cp;
blk_dev[MAJOR_NR].request_fn = DEVICE_REQUEST;
rd_start = (char *) mem_start;
rd_length = length;
cp = rd_start;
for (i=0; i < length; i++)
*cp++ = '\0';
return(length);
}
第6行:MAJOR_NR 的值是1。因为在这个函数所在文件里,有 #define MAJOR_NR 1
blk_dev是一个数组,其成员类型是struct blk_dev_struct
struct blk_dev_struct blk_dev[NR_BLK_DEV] = {
{ NULL, NULL }, /* no_dev */
{ NULL, NULL }, /* dev mem */
{ NULL, NULL }, /* dev fd */
{ NULL, NULL }, /* dev hd */
{ NULL, NULL }, /* dev ttyx */
{ NULL, NULL }, /* dev tty */
{ NULL, NULL } /* dev lp */
};
struct blk_dev_struct的定义是
struct blk_dev_struct {
void (*request_fn)(void);
struct request * current_request;
};
可以看出,2个成员都是指针,request_fn指向函数,current_request指向struct request.
回到函数rd_init:
blk_dev[MAJOR_NR].request_fn = DEVICE_REQUEST;
DEVICE_REQUEST实际上是设备请求函数do_rd_request
因为#define DEVICE_REQUEST do_rd_request
void do_rd_request(void)
{
int len;
char *addr;
INIT_REQUEST;
addr = rd_start + (CURRENT->sector << 9);
len = CURRENT->nr_sectors << 9;
if ((MINOR(CURRENT->dev) != 1) || (addr+len > rd_start+rd_length)) {
end_request(0);
goto repeat;
}
if (CURRENT-> cmd == WRITE) {
(void) memcpy(addr,
CURRENT->buffer,
len);
} else if (CURRENT->cmd == READ) {
(void) memcpy(CURRENT->buffer,
addr,
len);
} else
panic("unknown ramdisk-command");
end_request(1);
goto repeat;
}
此函数的代码,我们先不深入,以后用到再说。我们关注的是rd_init函数的以下几行:
rd_start = (char *) mem_start;
rd_length = length;
cp = rd_start; // cp是 char * 类型
for (i=0; i < length; i++)
*cp++ = '\0'; //以上3行, 盘区清零
return(length);
rd_start和rd_length都是全局变量,定义在文件kernel\blk_drv\ramdisk.c中:
char *rd_start; //虚拟盘的起始地址
int rd_length = 0; //虚拟盘空间大小,以B为单位
4.5 mem_init函数
该函数对 1MB 以上内存区域以页面为单位进行管理前的初始化设置工作。
一个页面长度为4KB字节。该函数把1MB以上所有物理内存划分成一个个页面,并使用一个页面映射字节数组mem_map[] 来管理这些页面。对于具有 16MB 内存容量的机器,该数组共有3840( (16M-1M)/4K=3840 )项 ,即可管理3840个物理页面。
每当一个物理内存页面被占用时就把 mem_map[]中对应的的字节值增1 ;若释放一个物理页面,就把对应字节值减 1。 若字节值为0 , 则表示对应页面空闲; 若字节值 >=1,则表示对应页面被占用或被不同程序共享占用。
在该版本内核中,最多能管理16MB的物理内存,大于16MB的内存将弃掉不用。对于具有16MB内存的PC机系统,在没有设置虚拟盘 RAMDISK 的情况下start_mem通常是4MB,end_mem是 16MB。因此主内存区范围是4MB~16MB,共有3072(=12M/4K)个物理页面可供分配。如果设置了 RAMDISK,那么start_mem会大于4MB.
void mem_init(long start_mem, long end_mem)
{
int i;
HIGH_MEMORY = end_mem;
// 参数start_mem是可用作页面分配的主内存区起始地址
//(已去除RAMDISK所占内存空间)。
// end_mem是实际物理内存最大地址。
//地址范围start_mem到end_mem是主内存区。
for (i=0 ; i<PAGING_PAGES ; i++) //PAGING_PAGES = 3840
mem_map[i] = USED; // 表示不可用?
i = MAP_NR(start_mem); // i=主内存区起始位置处页面号
end_mem -= start_mem; // 首尾相减,算出主内存区的大小
end_mem >>= 12; // 主内存区的总页面数
while (end_mem-->0)
mem_map[i++]=0; // 以上2行, 主内存区页面对应字节值清零
}
第11~12行: 首先将 1MB 到 16MB 范围内所有内存页面设置为已占用状态,即各项字节值全部设置成 USED(100)
PAGING_PAGES 被定义为(PAGING_MEM0RY>>12),即(15*1024*1024)>>12=3840
#define LOW_MEM 0x100000
#define PAGING_MEMORY (15*1024*1024) // 从 1M 到 16M
#define PAGING_PAGES (PAGING_MEMORY>>12) // 除以 4K
#define MAP_NR(addr) (((addr)-LOW_MEM)>>12)
#define USED 100
第13行:MAP_NR(start_mem) 即是(start_mem-0x100000)>>12,计算出主内存区起始位置处页面号。
4.6 trap_init函数
void trap_init(void)
{
int i;
set_trap_gate(0,÷_error);
set_trap_gate(1,&debug);
set_trap_gate(2,&nmi);
set_system_gate(3,&int3); /* int3-5 can be called from all */
set_system_gate(4,&overflow);
set_system_gate(5,&bounds);
...
...
}
以上代码主要是安装陷阱门。我们拿第5行作为例子,具体分析一下。
4.6.1 set_trap_gate(n,addr)
因为
#define set_trap_gate(n,addr) \ _set_gate(&idt[n],15,0,addr)
所以,set_trap_gate(n,addr)其实是_set_gate(&idt[n],15,0,addr),也就是下面7~15行的内嵌汇编代码。
#define set_trap_gate(n,addr) \
_set_gate(&idt[n],15,0,addr)
...
#define _set_gate(gate_addr,type,dpl,addr) \
__asm__ ("movw %%dx,%%ax\n\t" \
"movw %0,%%dx\n\t" \
"movl %%eax,%1\n\t" \
"movl %%edx,%2" \
: \
: "i" ((short) (0x8000+(dpl<<13)+(type<<8))), \
"o" (*((char *) (gate_addr))), \
"o" (*(4+(char *) (gate_addr))), \
"d" ((char *) (addr)),"a" (0x00080000))
d: 表示 edx
a: 表示 eax
i: 允许一个立即整形操作数,包括其值仅在汇编时确定的符号常量。
o: 允许一个内存操作数,但只有当地址是可偏移的。即该地址加上一个小的偏移量,结果是一个有效的内存地址。
第 8-10 行,分别有 %0, %1,2%,这分别代表 12-14 行的表达式。
以上内嵌汇编代码没有输出部分,仅有输入部分。
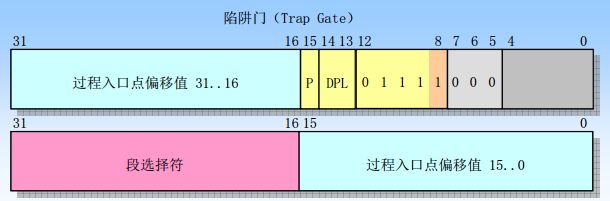
上图是陷阱门的格式,上面是高4字节(代码中用 edx 表示),下面是低4字节(代码中用 eax 表示)。注意:过程入口点偏移值不是物理地址,而是线性地址。
第15行:
"d" ((char *) (addr))表示用 addr 加载 edx;此时,偏移值的[31:16]就位。
addr 是异常处理函数入口点的地址。因为内核代码段的线性基址是0,所以偏移值等于函数的线性地址,又因为内核在之前的分页中采用了恒等映射机制——线性地址等于物理地址,所以偏移值等于函数的物理地址。
"a" (0x00080000) :表示用 0x0008_0000 加载 eax;此时,段选择符就位。
段选择子(符)的值是0x08,为什么是这个值呢?因为在进入main函数之前,已经设置好了GDT,0x08是代码段的选择子。忘了的话可以参考我的博文 head.s 分析 第三节。
第7行的"movw %%dx,%%ax\n\t"表示用 dx 加载 ax;此时,偏移值的[15:0]就位,eax也就位。
第8行的"movw %0,%%dx\n\t",表示用(0x8000+(dpl<<13)+(type<<8))加载 dx,
这里的 8 表示 P=1; 此时,edx 就位。
根据_set_gate(&idt[n],15,0,addr)的参数可知type=15(表示陷阱门), dpl=0。(0x8000+(dpl<<13)+(type<<8))拼出了陷阱门的第4~5字节(edx的低字)。
第9行"movl %%eax,%1\n\t"表示把 eax 的值赋给*((char *) (gate_addr)),就是赋给idt[n]的前4字节。
第10行"movl %%edx,%2" 表示把 edx 的值赋给*(4+(char *)(gate_addr)),就是赋给idt[n]的后4字节。这8字节拼起来就是完整的idt[n].
4.6.2 idt数组
idt是中断描述符表(其实是数组),一共有 256 个表项,一个表项占8字节。
%1对应第13行的(*((char *) (gate_addr)))
gate_addr就是第2行的&idt[n],那么idt是什么呢?在文件include\linux\head.h中有:
typedef struct desc_struct {
unsigned long a,b;
} desc_table[256];
extern desc_table idt,gdt;
1~3行:为struct desc_struct [256]取了一个别名——desc_table,也就是说desc_table的类型是“struct desc_struct类型的数组”。
第6行,注意extern关键字,声明(而不是定义)了 idt 和 gdt,它们的类型都是desc_table,即“struct desc_struct类型的数组”。所以,&idt[n]是数组idt第n个元素的地址。
可能有人要问, idt 和 gdt的定义在哪里呢?
它们是在汇编代码boot/head.s中定义的。
在本文件末尾有:
idt: .fill 256,8,0 # idt is uninitialized
gdt:
.quad 0x0000000000000000 /* NULL descriptor */
.quad 0x00c09a0000000fff /* 16Mb */
.quad 0x00c0920000000fff /* 16Mb */
.quad 0x0000000000000000 /* TEMPORARY - don't use */
.fill 252,8,0 /* space for LDT's and TSS's etc */
另外本文件开头有
.globl idt,gdt,pg_dir,tmp_floppy_area
.globl xxx表示把符号xxx声明为全局变量/标号,以供其他源文件访问。
好了,我们总结一下 _set_gate(gate_addr,type,dpl,addr) 这个宏
#define _set_gate(gate_addr,type,dpl,addr) \
__asm__ ("movw %%dx,%%ax\n\t" \ //将偏移地址低字与选择符组合成描述符低4字节(eax)
"movw %0,%%dx\n\t" \ //将类型标志与偏移地址高字组合成描述符高4字节(edx)
"movl %%eax,%1\n\t" \ //分别设置门描述符的低4字节和高4字节
"movl %%edx,%2" \
: \
: "i" ((short) (0x8000+(dpl<<13)+(type<<8))), \
"o" (*((char *) (gate_addr))), \
"o" (*(4+(char *) (gate_addr))), \
"d" ((char *) (addr)),"a" (0x00080000))
_set_gate(gate_addr,type,dpl,addr)此宏用于设置门描述符,即填写 IDT 中的某一项
根据参数中的中断或异常处理过程地址 addr 、门描述符类型 type 和特权级信息 dpl ,设置位于地址 gate_addr 处的门描述符。(注意:下面的“偏移”是相对于内核代码或数据段来说的。)
gate_addr:描述符存储地址;
type:描述符类型;
dpl:描述符特权级;
addr:偏移地址。
%0:由dpl,type组合成的类型值;
%1:描述符低 4 字节的存储地址;
%2:描述符高 4 字节的存储地址;
%3:即 (char *) (addr),edx(程序偏移地址addr);
%4:即 0x00080000,eax(高字中含有段选择符0x8) 。
4.6.3 set_system_gate(n,addr)
#define set_system_gate(n,addr) \
_set_gate(&idt[n],15,3,addr)
这个宏和set_trap_gate(n,addr)的区别仅有一点:前者的dpl=3,后者的dpl=0;
分析到这里, trap_init函数的大意已经明了。
void trap_init(void)
{
int i;
set_trap_gate(0,÷_error);
set_trap_gate(1,&debug);
set_trap_gate(2,&nmi);
set_system_gate(3,&int3); /* int3-5 can be called from all */
set_system_gate(4,&overflow);
set_system_gate(5,&bounds);
set_trap_gate(6,&invalid_op);
set_trap_gate(7,&device_not_available);
set_trap_gate(8,&double_fault);
set_trap_gate(9,&coprocessor_segment_overrun);
set_trap_gate(10,&invalid_TSS);
set_trap_gate(11,&segment_not_present);
set_trap_gate(12,&stack_segment);
set_trap_gate(13,&general_protection);
set_trap_gate(14,&page_fault);
set_trap_gate(15,&reserved);
set_trap_gate(16,&coprocessor_error);
for (i=17;i<48;i++)
set_trap_gate(i,&reserved);
set_trap_gate(45,&irq13); // 设置协处理器中断0x2d(=45)的陷阱门描述符
outb_p(inb_p(0x21)&0xfb,0x21); // 允许8259A主芯片的IRQ2中断请求
outb(inb_p(0xA1)&0xdf,0xA1);
set_trap_gate(39,¶llel_interrupt); //设置并行口1的中断0x27(=39)陷阱门描述符
}
5~21 行:设置IDT的描述符。其中断点陷阱中断int3、溢出中断overflow、边界出错中断bounds可以由任何程序产生,所以 DPL = 3
22~23行:把int 17 ~ int 48的陷阱门先设置为reserved,以后各个硬件初始化时会重新设置自己的陷阱门。
注意:set_trap_gate的第二个参数是中断处理函数的入口点,它们的代码在文件linux/kernel/asm.s或者linux/kernel/system_call.s中。
第25行:outb_p(inb_p(0x21)&0xfb,0x21);
0x21是 8259A 主片命令字OCW1的端口地址,用于对其中断屏蔽寄存器 IMR 进行读/写操作。
inb_p(0x21)&0xfb读出 IMR 的值,然后与0xfb(=1111_1011b),即清零D2位,也就是允许主片的 IRQ2 中断请求。

注意:Linux-0.11 系统把主片的 ICW2 设置为 0x20,表示主片中断请求0~7级对应的中断号是 0x20~0x27;把从片的 ICW2 设置成 0x28,表示从片中断请求8~15级对应的中断号是 0x28~0x2f。
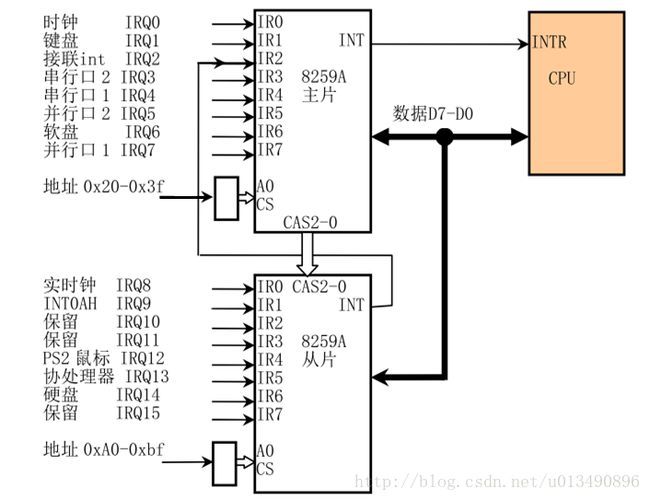
第26行:outb(inb_p(0xA1)&0xdf,0xA1);
0xA1是 8259A 从片命令字OCW1的端口地址。原理同上,inb_p(0xA1)&0xdf读出从片 IMR 的值,然后与0xdf(=1101_1111),即清零D5位,由上图可知,允许从片 IRQ13 协处理器中断。
关于8259A的编程,可以参考我的博文: 详解8259A
囿于篇幅,对main()函数的分析先到这里。
—【未完待续】—
参考资料
《Linux内核完全剖析》(赵炯,机械工业出版社,2006)