图像处理(九)——Harris角点检测
实现Harris角点检测算法,并与OpenCV的cornerHarris函数的结果进行比较。
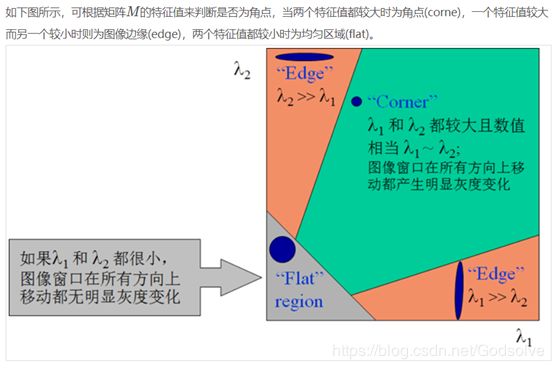
特征点在图像中一般有具体的坐标,并具有某些数学特征,如局部最大或最小灰度、以及某些梯度特征等。角点可以简单的认为是两条边的交点。如下图所示:

在各个方向上移动小窗口,如果在所有方向上移动,窗口内灰度都发生变化,则认为是角点;如果任何方向都不变化,则是均匀区域;如果灰度只在一个方向上变化,则可能是图像边缘。
而Harris角点检测算法就是基于图像的这种特点来进行计算的。该算法的主要步骤为:
- 计算图像I(x,y)I(x,y)在XX方向和YY方向的梯度

- 计算图像两个方向梯度的乘积

- 使用窗口高斯函数分别对
 进行高斯加权,生成矩阵M。
进行高斯加权,生成矩阵M。

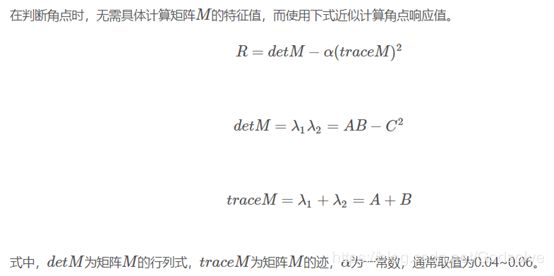
- 计算每个像素的Harris响应值R,并设定一阈值T,对小于阈值T的R置零。

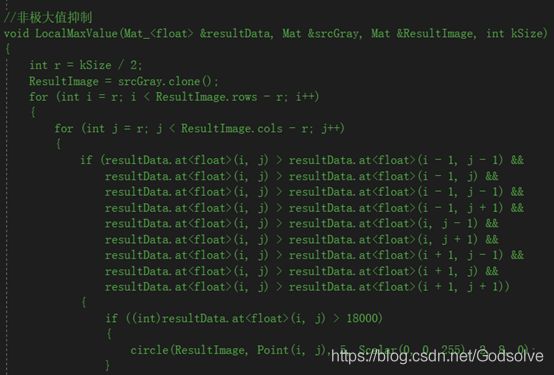
- 在一个固定窗口大小的邻域内(5×55×5)进行非极大值抑制,局部极大值点即为图像中的角点。
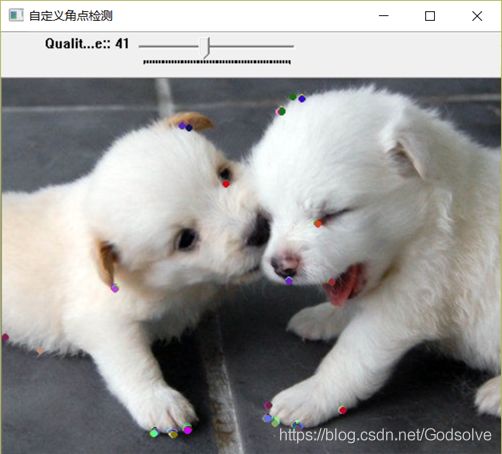
运行结果为:

改了一下响应函数的参数值:

但是发现这种方法做出来的效果并不是很好,虽然找出来了一些角点,但是还有很多角点没有找到,而且找到了很多错误的或者在当前阈值下不应该出现的角点。
之后找到了opencv中自带的角点检测函数,并用其对相同的图片进行了处理,结果如下:
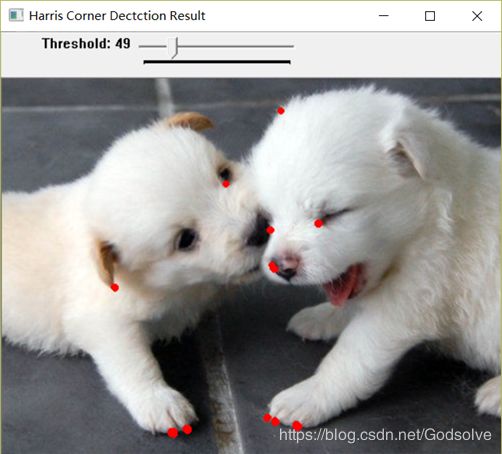


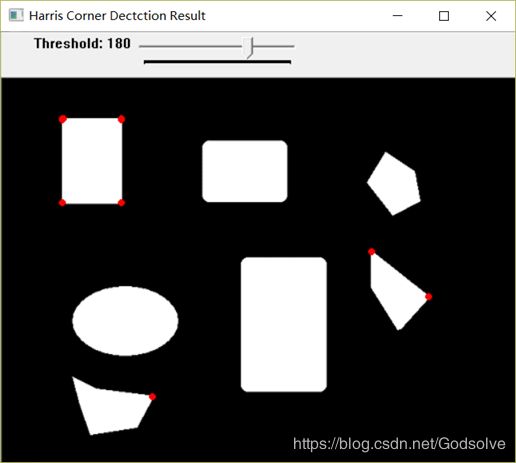
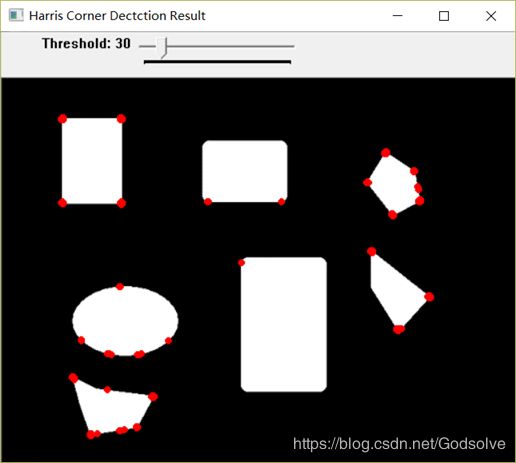
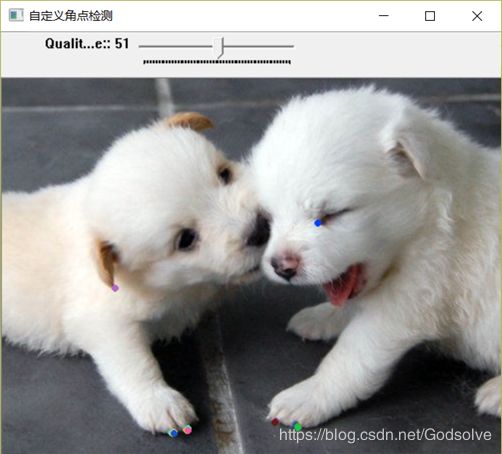
后来又查了些资料,使用cornerEigenValsAndVecs()函数和minMaxLoc()函数来重新写了一下角点检测算法,测试结果还不错:


角点检测(Corner Detection)也称为特征点检测,是图像处理和计算机视觉中用来获取图像局部特征点的一类方法,广泛应用于运动检测、图像匹配、视频跟踪、三维建模以及目标识别等领域中。
在实验过程中,也发现了Harris角点的一些性质:
参数α对角点检测的影响:增大α的值,将减小角点响应值R,减少被检测角点的数量;减小α的值,将增大角点响应值R,增加被检测角点的数量。
此外,该方法还可以扩展到多尺度Harris角点检测,但是在此次实验中没有实现,可以考虑在之后加以实现。
同时也欢迎各位关注我的微信的公众号 南木的下午茶

代码:
// CVE8.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//
#include "pch.h"
#include
#include #include
#include
#include
using namespace cv;
using namespace std;
// 定义全局变量
const string harris_winName = "自定义角点检测";
Mat src_img, gray_img; // src_img表示原图, gray_img表示灰度图
Mat harris_dst_img, harris_response_img; // harris_dst_img存储自相关矩阵M的特征值和特征向量,harris_response_img存储响应函数的结果
double min_respense_value; // 响应函数的结果矩阵中的最小值
double max_respense_value; // 响应函数的结果矩阵中的最大值
int qualityValue = 30;
int max_qualityValue = 100; // 通过qualityValue/max_qualityValue的结果作为qualitylevel来计算阈值
RNG random_number_generator; // 定义一个随机数发生器
void self_defining_Harris_Demo(int, void*); //TrackBar回调函数声明
// 主函数
int main()
{
src_img = imread("E:/C++/CVE8/img.jpg");
if (src_img.empty())
{
printf("could not load the image...\n");
return -1;
}
namedWindow("原图", CV_WINDOW_AUTOSIZE);
imshow("原图", src_img);
cvtColor(src_img, gray_img, COLOR_BGR2GRAY); //将彩色图转化为灰度图
// 计算特征值
int blockSize = 3;
int ksize = 3;
double k = 0.04;
harris_dst_img = Mat::zeros(src_img.size(), CV_32FC(6));
// 目标图像harris_dst_img存储自相关矩阵M的特征值和特征向量,
// 并将它们以(λ1, λ2, x1, y1, x2, y2)的形式存储。其中λ1, λ2是M未经过排序的特征值;
// x1, y1是对应于λ1的特征向量;x2, y2是对应于λ2的特征向量。
// 因此目标矩阵为6通道,即 CV_32FC(6)的矩阵。
harris_response_img = Mat::zeros(src_img.size(), CV_32FC1);
// harris_response_img用来存储通过每个像素值所对应的自相关矩阵所计算得到的响应值
cornerEigenValsAndVecs(gray_img, harris_dst_img, blockSize, ksize, 4);
// 该函数用来计算每个像素值对应的自相关矩阵的特征值和特征向量
// 计算响应函数值
for (int row = 0; row < harris_dst_img.rows; ++row)
{
for (int col = 0; col < harris_dst_img.cols; ++col)
{
double eigenvalue1 = harris_dst_img.at(row, col)[0]; // 获取特征值1
double eigenvalue2 = harris_dst_img.at(row, col)[1]; // 获取特征值2
harris_response_img.at(row, col) = eigenvalue1 * eigenvalue2 - k * pow((eigenvalue1 + eigenvalue2), 2);
// 通过响应公式R=λ1*λ2 - k*(λ1+λ2)*(λ1+λ2)来计算每个像素对应的响应值
}
}
minMaxLoc(harris_response_img, &min_respense_value, &max_respense_value, 0, 0, Mat()); // 寻找响应矩阵中的最小值和最大值
namedWindow(harris_winName, CV_WINDOW_AUTOSIZE);
createTrackbar("Quality Value:", harris_winName, &qualityValue, max_qualityValue, self_defining_Harris_Demo); //创建TrackBar
self_defining_Harris_Demo(0, 0);
waitKey(0);
return 0;
}
// 回调函数实现
void self_defining_Harris_Demo(int, void*)
{
if (qualityValue < 10)
{
qualityValue = 10; // 控制qualitylevel的下限值
}
Mat result_img = src_img.clone(); // 输出图像
float threshold_value = min_respense_value + (((double)qualityValue) / max_qualityValue)*(max_respense_value - min_respense_value);
for (int row = 0; row < result_img.rows; row++)
{
for (int col = 0; col < result_img.cols; col++)
{
float resp_value = harris_response_img.at(row, col);
if (resp_value > threshold_value)
{
circle(result_img, Point(col, row), 2, Scalar(random_number_generator.uniform(0, 255),
random_number_generator.uniform(0, 255), random_number_generator.uniform(0, 255)), 2, 8, 0);
}
}
}
imshow(harris_winName, result_img);
}
// CVE8.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//
#include "pch.h"
#include
#include
#include
#include
using namespace cv;
using namespace std;
Mat image;
Mat imageGray;
int thresh = 175;
int MaxThresh = 255;
void Trackbar(int, void*); //阈值控制
int main()
{
image = imread("E:/C++/CVE8/img.jpg");
cvtColor(image, imageGray, CV_RGB2GRAY);
GaussianBlur(imageGray, imageGray, Size(5, 5), 1); // 滤波
namedWindow("Corner Detected");
createTrackbar("threshold:", "Corner Detected", &thresh, MaxThresh, Trackbar);
imshow("Corner Detected", image);
Trackbar(0, 0);
waitKey();
return 0;
}
void Trackbar(int, void*)
{
Mat dst, dst8u, dstshow, imageSource;
dst = Mat::zeros(image.size(), CV_32FC1);
imageSource = image.clone();
cornerHarris(imageGray, dst, 3, 3, 0.04, BORDER_DEFAULT);
normalize(dst, dst8u, 0, 255, CV_MINMAX); //归一化
convertScaleAbs(dst8u, dstshow);
imshow("dst", dstshow); //dst显示
for (int i = 0; i < image.rows; i++)
{
for (int j = 0; j < image.cols; j++)
{
if (dstshow.at(i, j) > thresh) //阈值判断
{
circle(imageSource, Point(j, i), 2, Scalar(0, 0, 255), 2); //标注角点
}
}
}
imshow("Corner Detected", imageSource);
}
#include "pch.h"
#include
#include
#include
#include
#include
using namespace cv;
using namespace std;
int thresh = 130;
int max_count = 255;
Mat img, img_gray;
const char* output_title = "Harris Corner Dectction Result";
void Harris_Demo(int, void *);
int main(int argv, char** argc) {
img = imread("E:/C++/CVE8/图片1.png");
if (img.empty()) {
printf("colud not load image...");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", img);
//以上是图像处理的标准开头
namedWindow(output_title, CV_WINDOW_AUTOSIZE);
cvtColor(img, img_gray, CV_BGR2GRAY);
createTrackbar("Threshold", output_title, &thresh, max_count, Harris_Demo);
Harris_Demo(0, 0);
waitKey(0);
return 0;
}
void Harris_Demo(int, void *) {
Mat dst, norm_dst, normScaleDst;
dst = Mat::zeros(img_gray.size(), CV_32FC1);
//harris角点核心函数
int blockSize = 3;
int ksize = 3;
int k = 0.04;
cornerHarris(img_gray, dst, blockSize, ksize, k, BORDER_DEFAULT);
//上述输出的取值范围并不是0-255 需要按照最大最小值进行归一化
normalize(dst, norm_dst, 0, 255, NORM_MINMAX, CV_32FC1, Mat());
convertScaleAbs(norm_dst, normScaleDst);
Mat resultImg = img.clone();
//用彩色来显示
for (int row = 0; row < resultImg.rows; row++) {
//定义每一行的指针
uchar* currentRow = normScaleDst.ptr(row);
for (int col = 0; col < resultImg.cols; col++) {
int value = (int)*currentRow;
if (value > thresh) {
circle(resultImg, Point(col, row), 2, Scalar(0, 0, 255), 2, 8, 0);
}
currentRow++;
}
}
imshow(output_title, resultImg);
}