Apollo进阶课程㉓丨Apollo规划技术详解——Motion Planning with Environment
原创: 阿波君 Apollo开发者社区 6月26日

当行为层决定要在当前环境中执行的驾驶行为时,其可以是例如巡航-车道,改变车道或右转,所选择的行为必须被转换成路径或轨迹,可由低级反馈控制器跟踪。所产生的路径或轨迹必须满足车辆动力学约束的,对乘客来说是舒适的,并且避免与车载传感器检测到的障碍物的碰撞。寻找这样的路径或轨迹的任务是运动规划系统的责任。
由于规划是感知和控制之间的纽带,当前的新规划算法开发多考虑感知的不确定性以及控制的约束。在动态环境数据采集过程中,路径规划的最新发展目标是正确处理数据采集过程中的不确定性。这在实时的情况下会有更好的环境感知效果,并指导规划过程。通过考虑感知阶段的不确定性来提高防止危险情况的能力。从控制的角度来看,需考虑多目标,包括车辆的运动学约束和乘客的舒适性等。
上周阿波君为大家详细介绍了「进阶课程㉒Apollo规划技术详解——Motion Planning with Autonomous Driving」。
主要介绍了运动规划的一些基本方法,重点从robotics的角度阐释。包括有RRT(基于快速扩展随机树算法)、Lattice网络方法、Spira方法、Polynomial方法、Functional Optimization方法等。
本周阿波君将与大家分享Apollo规划技术详解——Motion Planning with Environment。下面,我们一起进入进阶课程第23期。
目录
1.运动规划的环境变化
2.Vehicle Model的建立
3.曲线坐标系SL
4.SL坐标系到XY坐标系的投影
5.XY坐标系到SL坐标系的投影
1.运动规划的环境变化
运动规划根据环境的变化在算法和处理方法上有很大的不同,涉及到模型建立、平滑优化和坐标转换以及障碍物投影等。如下图所示。
运动规划的环境变化
2.Vehicle Model的建立
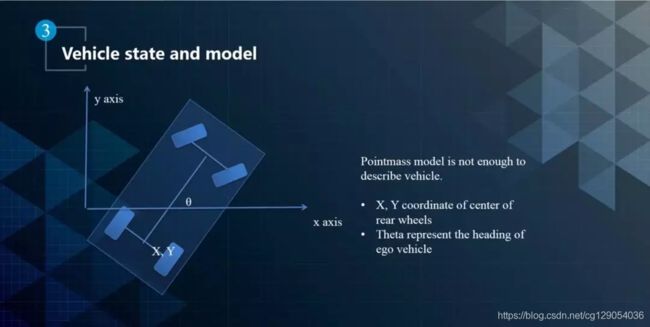
Vehicle Model的建立
对于汽车而言,质点模型是远远不够的,无人车是前轮转向的车,前后位置的变化是不一样的,那么怎么去描述这种不一样呢?首先从刚体角度考虑,二维平面里的刚体涉及到 和
和 ,也就是以车后轴中心作为坐标原点时车身的朝向heading。因为无人车运动模型还多了一个转向的变量,多了一个自由度,刚体模型也不够。
,也就是以车后轴中心作为坐标原点时车身的朝向heading。因为无人车运动模型还多了一个转向的变量,多了一个自由度,刚体模型也不够。
可以将汽车运动模型简化为自行车模型,将四轮抽象成两个轮子,前轮中心和后轮中心的运动方向和自行车一样。车辆在垂直方向的运动被忽略掉,用一个二维平面上的运动物体来描述车辆的运动模型。自行车运动的时候具有以下特点,旋转车头的时候,前轮和后轮都围绕一个中心点转动,并且后轮的转向半径![]()
![]() 与方向盘转动角度
与方向盘转动角度 满足以下关系,其中L为前轮中心和后轮中心的距离:
满足以下关系,其中L为前轮中心和后轮中心的距离:
![]()
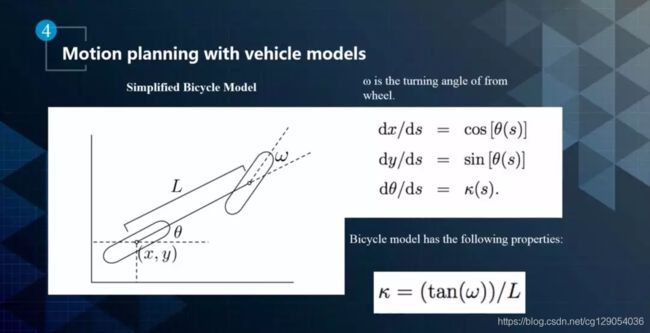
运动规划与车辆模型
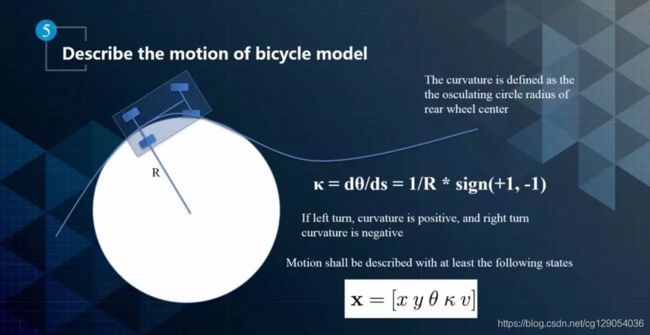
实际的自行车运动模型
在实际的自行车运动模型中,后轴中心是沿着如上图所示的一条平滑的轨迹运行,该轨迹对应的曲率![]() 表示调整方向盘的度数,如果为正,表示向左转,反之则向右转。因此,自行车运动模型可以用
表示调整方向盘的度数,如果为正,表示向左转,反之则向右转。因此,自行车运动模型可以用 ,
, ,,k还有速度
,,k还有速度 来表示。那么沿着这样的轨迹运动时,如何去估计障碍物的距离呢?解决这个问题,先了解一下曲线坐标系以及与世界坐标系之间的转换关系。
来表示。那么沿着这样的轨迹运动时,如何去估计障碍物的距离呢?解决这个问题,先了解一下曲线坐标系以及与世界坐标系之间的转换关系。
3.曲线坐标系SL
SL坐标系也叫做frenet frame,如下所示。它以道路中心线为参考,S表示道路中心线的方向,L表示与道路中心线垂直的方向。在结构化道路上行驶的时候,SL坐标系比XY坐标系更加贴合实际需求。那么SL坐标系如何转换到XY坐标系呢?
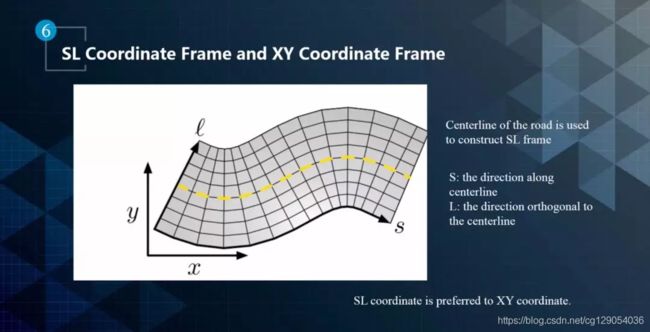
SL坐标系和XY坐标系
4.SL坐标系到XY坐标系的投影
之所以要投影到世界坐标系,是因为很多信息是全局的,例如红绿灯位置,参考的是XY世界坐标系。在给定SL坐标系时,每一个点的S坐标本身对应一个![]()
![]() 坐标,根据该点的横向偏移距离,可以求出给定点在世界坐标系中的XY位置,如下图所示。其中theta是参考线的方向,也就是切线方向。如果XY与S方向平行的话,轨迹的曲率还满足图中所示的关系。
坐标,根据该点的横向偏移距离,可以求出给定点在世界坐标系中的XY位置,如下图所示。其中theta是参考线的方向,也就是切线方向。如果XY与S方向平行的话,轨迹的曲率还满足图中所示的关系。
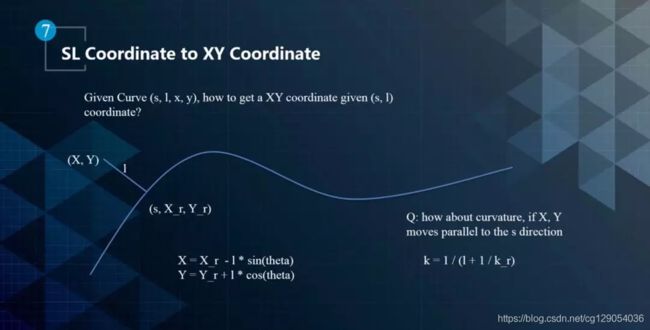
SL坐标系到XY坐标系的投影
5.XY坐标系到SL坐标系的投影
对于一个给定的曲线,如何将XY坐标系下的点转换到SL坐标系呢?因为SL坐标系并不是唯一的,XY会在曲线上产生很多投影,投影点是经过XY坐标,且垂直于曲线的线段与曲线的交点,如下图所示,XY就有两个投影点。通常情况下会增加一些限制,例如投影距离不能超曲率值。需要注意的是,掉头的时候还是需要特殊处理的。
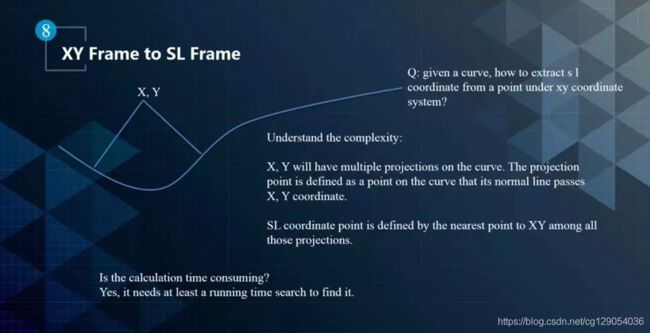
XY坐标系到SL坐标系的投影