手写数字识别之模型加载及恢复训练
内容都是百度AIstudio的内容,我只是在这里做个笔记,不是原创。
在快速入门中,我们已经介绍了将训练好的模型保存到磁盘文件的方法。应用程序可以随时加载模型,完成预测任务。但是在日常训练工作中我们会遇到一些突发情况,导致训练过程主动或被动的中断。如果训练一个模型需要花费几天的训练时间,中断后从初始状态重新训练是不可接受的。
万幸的是,飞桨支持从上一次保存状态开始训练,只要我们随时保存训练过程中的模型状态,就不用从初始状态重新训练。
注意进行恢复训练的程序不仅要保存模型参数,还要保存优化器参数。这是因为某些优化器含有一些随着训练过程变换的参数,例如Adam, Adagrad等优化器采用可变学习率的策略,随着训练进行会逐渐减少学习率。这些优化器的参数对于恢复训练至关重要。
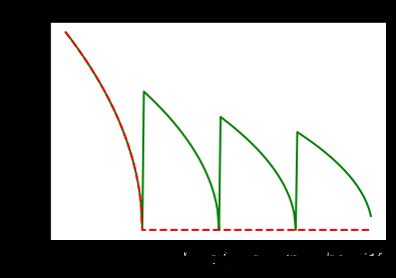
为了演示这个特性,下面训练程序使用adam优化器,学习率以多项式曲线从0.01衰减到0.001(polynomial decay)。
lr = fluid.dygraph.PolynomialDecay(0.01, total_steps, 0.001)
- learning_rate:初始学习率
- decay_steps:衰减步数
- end_learning_rate:最终学习率
- power:多项式的幂,默认值为1.0
- cycle:下降后是否重新上升,polynomial decay的变化曲线下图所示。
import os
import random
import paddle
import paddle.fluid as fluid
from paddle.fluid.dygraph.nn import Conv2D, Pool2D, Linear
import numpy as np
from PIL import Image
import gzip
import json
# 定义数据集读取器
def load_data(mode='train'):
# 数据文件
datafile = './work/mnist.json.gz'
print('loading mnist dataset from {} ......'.format(datafile))
data = json.load(gzip.open(datafile))
train_set, val_set, eval_set = data
# 数据集相关参数,图片高度IMG_ROWS, 图片宽度IMG_COLS
IMG_ROWS = 28
IMG_COLS = 28
if mode == 'train':
imgs = train_set[0]
labels = train_set[1]
elif mode == 'valid':
imgs = val_set[0]
labels = val_set[1]
elif mode == 'eval':
imgs = eval_set[0]
labels = eval_set[1]
imgs_length = len(imgs)
assert len(imgs) == len(labels), \
"length of train_imgs({}) should be the same as train_labels({})".format(
len(imgs), len(labels))
index_list = list(range(imgs_length))
# 读入数据时用到的batchsize
BATCHSIZE = 100
# 定义数据生成器
def data_generator():
#if mode == 'train':
# random.shuffle(index_list)
imgs_list = []
labels_list = []
for i in index_list:
img = np.reshape(imgs[i], [1, IMG_ROWS, IMG_COLS]).astype('float32')
label = np.reshape(labels[i], [1]).astype('int64')
imgs_list.append(img)
labels_list.append(label)
if len(imgs_list) == BATCHSIZE:
yield np.array(imgs_list), np.array(labels_list)
imgs_list = []
labels_list = []
# 如果剩余数据的数目小于BATCHSIZE,
# 则剩余数据一起构成一个大小为len(imgs_list)的mini-batch
if len(imgs_list) > 0:
yield np.array(imgs_list), np.array(labels_list)
return data_generator
#调用加载数据的函数
train_loader = load_data('train')
# 定义模型结构
class MNIST(fluid.dygraph.Layer):
def __init__(self, name_scope):
super(MNIST, self).__init__(name_scope)
name_scope = self.full_name()
# 定义一个卷积层,使用relu激活函数
self.conv1 = Conv2D(num_channels=1, num_filters=20, filter_size=5, stride=1, padding=2, act='relu')
# 定义一个池化层,池化核为2,步长为2,使用最大池化方式
self.pool1 = Pool2D(pool_size=2, pool_stride=2, pool_type='max')
# 定义一个卷积层,使用relu激活函数
self.conv2 = Conv2D(num_channels=20, num_filters=20, filter_size=5, stride=1, padding=2, act='relu')
# 定义一个池化层,池化核为2,步长为2,使用最大池化方式
self.pool2 = Pool2D(pool_size=2, pool_stride=2, pool_type='max')
# 定义一个全连接层,输出节点数为10
self.fc = Linear(input_dim=980, output_dim=10, act='softmax')
# 定义网络的前向计算过程
def forward(self, inputs, label):
x = self.conv1(inputs)
x = self.pool1(x)
x = self.conv2(x)
x = self.pool2(x)
x = fluid.layers.reshape(x, [x.shape[0], 980])
x = self.fc(x)
if label is not None:
acc = fluid.layers.accuracy(input=x, label=label)
return x, acc
else:
return x
#在使用GPU机器时,可以将use_gpu变量设置成True
use_gpu = True
place = fluid.CUDAPlace(0) if use_gpu else fluid.CPUPlace()
with fluid.dygraph.guard(place):
model = MNIST("mnist")
model.train()
EPOCH_NUM = 5
BATCH_SIZE = 100
# 定义学习率,并加载优化器参数到模型中
total_steps = (int(60000//BATCH_SIZE) + 1) * EPOCH_NUM
lr = fluid.dygraph.PolynomialDecay(0.01, total_steps, 0.001)
# 使用Adam优化器
optimizer = fluid.optimizer.AdamOptimizer(learning_rate=lr, parameter_list=model.parameters())
for epoch_id in range(EPOCH_NUM):
for batch_id, data in enumerate(train_loader()):
#准备数据,变得更加简洁
image_data, label_data = data
image = fluid.dygraph.to_variable(image_data)
label = fluid.dygraph.to_variable(label_data)
#前向计算的过程,同时拿到模型输出值和分类准确率
predict, acc = model(image, label)
avg_acc = fluid.layers.mean(acc)
#计算损失,取一个批次样本损失的平均值
loss = fluid.layers.cross_entropy(predict, label)
avg_loss = fluid.layers.mean(loss)
#每训练了200批次的数据,打印下当前Loss的情况
if batch_id % 200 == 0:
print("epoch: {}, batch: {}, loss is: {}, acc is {}".format(epoch_id, batch_id, avg_loss.numpy(),avg_acc.numpy()))
#后向传播,更新参数的过程
avg_loss.backward()
optimizer.minimize(avg_loss)
model.clear_gradients()
# 保存模型参数和优化器的参数
fluid.save_dygraph(model.state_dict(), './checkpoint/mnist_epoch{}'.format(epoch_id))
fluid.save_dygraph(optimizer.state_dict(), './checkpoint/mnist_epoch{}'.format(epoch_id))
params_path = "./checkpoint/mnist_epoch0"
#在使用GPU机器时,可以将use_gpu变量设置成True
use_gpu = True
place = fluid.CUDAPlace(0) if use_gpu else fluid.CPUPlace()
with fluid.dygraph.guard(place):
# 加载模型参数到模型中
params_dict, opt_dict = fluid.load_dygraph(params_path)
model = MNIST("mnist")
model.load_dict(params_dict)
EPOCH_NUM = 5
BATCH_SIZE = 100
# 定义学习率,并加载优化器参数到模型中
total_steps = (int(60000//BATCH_SIZE) + 1) * EPOCH_NUM
lr = fluid.dygraph.PolynomialDecay(0.01, total_steps, 0.001)
# 使用Adam优化器
optimizer = fluid.optimizer.AdamOptimizer(learning_rate=lr, parameter_list=model.parameters())
optimizer.set_dict(opt_dict)
for epoch_id in range(1, EPOCH_NUM):
for batch_id, data in enumerate(train_loader()):
#准备数据,变得更加简洁
image_data, label_data = data
image = fluid.dygraph.to_variable(image_data)
label = fluid.dygraph.to_variable(label_data)
#前向计算的过程,同时拿到模型输出值和分类准确率
predict, acc = model(image, label)
avg_acc = fluid.layers.mean(acc)
#计算损失,取一个批次样本损失的平均值
loss = fluid.layers.cross_entropy(predict, label)
avg_loss = fluid.layers.mean(loss)
#每训练了200批次的数据,打印下当前Loss的情况
if batch_id % 200 == 0:
print("epoch: {}, batch: {}, loss is: {}, acc is {}".format(epoch_id, batch_id, avg_loss.numpy(),avg_acc.numpy()))
#后向传播,更新参数的过程
avg_loss.backward()
optimizer.minimize(avg_loss)
model.clear_gradients()