【deeplearning】Pytorch实战1:卷积神经网络(LeNet-5)手写数字识别 (MNIST数据集)
一、实验环境:
- Pytorch 1.3.1
- torchvision 0.4.2
- Python 3.7
- ubuntu+Pycharm
LeNet-5出自论文Gradient-Based Learning Applied to Document
Recognition,是一种用于手写体字符识别的非常高效的卷积神经网络。
二、卷积神经网络(Convolutional Neural Network, CNN)
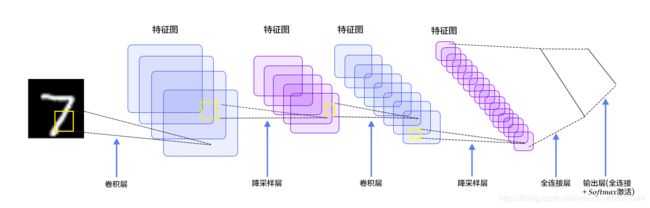
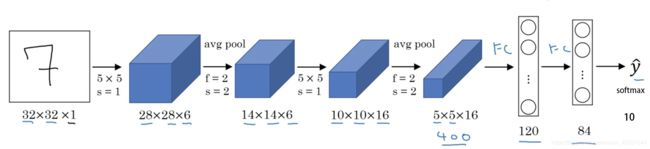
在讲解LeNet-5之前,让我们先看下CNN。卷积神经网络能够很好的利用图像的结构信息。LeNet-5是一个较简单的卷积神经网络。下图显示了其结构:输入的二维图像,先经过两次卷积层到池化层,再经过全连接层,最后使用softmax分类作为输出层。下面我们主要介绍卷积层和池化层。
1、卷积层
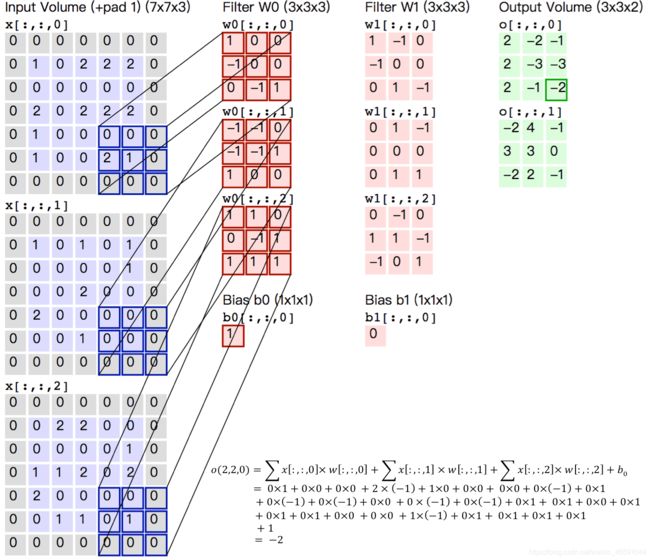
卷积层是卷积神经网络的核心基石。在图像识别里我们提到的卷积是二维卷积,即离散二维滤波器(也称作卷积核)与二维图像做卷积操作,简单的讲是二维滤波器滑动到二维图像上所有位置,并在每个位置上与该像素点及其领域像素点做内积。卷积操作被广泛应用与图像处理领域,不同卷积核可以提取不同的特征,例如边沿、线性、角等特征。在深层卷积神经网络中,通过卷积操作可以提取出图像低级到复杂的特征。
2、池化层
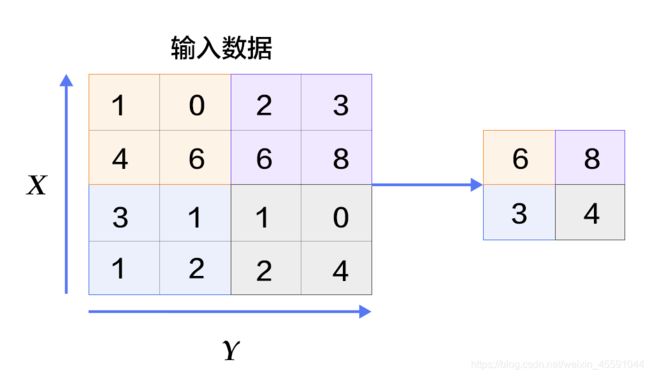
池化是非线性下采样的一种形式,主要作用是通过减少网络的参数来减小计算量,并且能够在一定程度上控制过拟合。通常在卷积层的后面会加上一个池化层。池化包括最大池化、平均池化等。其中最大池化是用不重叠的矩形框将输入层分成不同的区域,对于每个矩形框的数取最大值作为输出层,如上图所示。
三、Lenet-5
LeNet5 这个网络虽然很小,但是它包含了深度学习的基本模块:卷积层,池化层,全链接层。是其他深度学习模型的基础, 这里我们对LeNet5进行深入分析。同时,通过实例分析,加深对与卷积层和池化层的理解。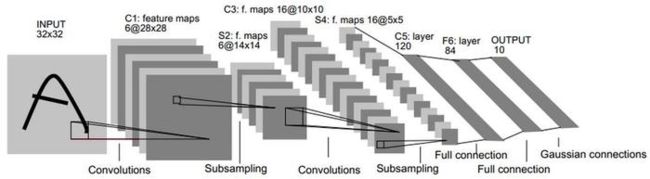
网络结构和参数:
- 输入层
图片大小为 32×32×1,其中 1 表示为黑白图像,只有一个 channel。
- 卷积层
filter 大小 5×5,filter 深度(个数)为 6,padding 为 0, 卷积步长 s=1,输出矩阵大小为 28×28×6,其中 6 表示 filter 的个数。
- 池化层
average pooling,filter 大小 2×2(即 f=2),步长 s=2,no padding,输出矩阵大小为 14×14×6。
- 卷积层
filter 大小 5×5,filter 个数为 16,padding 为 0, 卷积步长 s=1,输出矩阵大小为 10×10×16,其中 16 表示 filter 的个数。
- 池化层
average pooling,filter 大小 2×2(即 f=2),步长 s=2,no padding,输出矩阵大小为 5×5×16。注意,在该层结束,需要将 5×5×16 的矩阵flatten 成一个 400 维的向量。
- 全连接层(Fully Connected layer,FC)
neuron 数量为 120。
- 全连接层(Fully Connected layer,FC)
neuron 数量为 84。
- 全连接层,输出层
现在版本的 LeNet-5 输出层一般会采用 softmax 激活函数,在 LeNet-5 提出的论文中使用的激活函数不是 softmax,但其现在不常用。该层神经元数量为 10,代表 0~9 十个数字类别。(图 1 其实少画了一个表示全连接层的方框,而直接用 y^ 表示输出层。)
3.1、LeNet-5 的性质:
如果输入层不算神经网络的层数,那么 LeNet-5 是一个 7 层的网络。(有些地方也可能把 卷积和池化 当作一个 layer)(LeNet-5 名字中的“5”也可以理解为整个网络中含可训练参数的层数为 5。)
LeNet-5 大约有 60,000 个参数。
随着网络越来越深,图像的高度和宽度在缩小,与此同时,图像的 channel 数量一直在增加。
现在常用的 LeNet-5 结构和 Yann LeCun 教授在 1998 年论文中提出的结构在某些地方有区别,比如激活函数的使用,现在一般使用 ReLU 作为激活函数,输出层一般选择 softmax。
3.2、各层参数详解:
1、INPUT层-输入层
首先是数据 INPUT 层,输入图像的尺寸统一归一化为32×32。
注意:本层不算LeNet-5的网络结构,传统上,不将输入层视为网络层次结构之一。
2、C1层-卷积层
输入图片:32×32
卷积核大小:5×5
卷积核种类:6
输出featuremap大小:28×28 (32-5+1)=28
神经元数量:28×28×6
可训练参数:(5×5+1) × 6(每个滤波器5*5=25个unit参数和一个bias参数,一共6个滤波器)
连接数:(5×5+1)×6×28×28=122304
详细说明:对输入图像进行第一次卷积运算(使用 6 个大小为 5×5 的卷积核),得到6个C1特征图(6个大小为28×28的 feature maps, 32-5+1=28)。我们再来看看需要多少个参数,卷积核的大小为5×5,总共就有6*(5×5+1)=156个参数,其中+1是表示一个核有一个bias。对于卷积层C1,C1内的每个像素都与输入图像中的5×5个像素和1个bias有连接,所以总共有156×28×28=122304个连接(connection)。有122304个连接,但是我们只需要学习156个参数,主要是通过权值共享实现的。
3、S2层-池化层(下采样层)
输入:28×28
采样区域:2×2
采样方式:4个输入相加,乘以一个可训练参数,再加上一个可训练偏置。结果通过sigmoid
采样种类:6
输出featureMap大小:14×14(28/2)
神经元数量:14×14×6
连接数:(2×2+1)×6×14×14
S2中每个特征图的大小是C1中特征图大小的1/4。
详细说明:第一次卷积之后紧接着就是池化运算,使用 2×2核 进行池化,于是得到了S2,6个14×14的 特征图(28/2=14)。S2这个pooling层是对C1中的2×2区域内的像素求和乘以一个权值系数再加上一个偏置,然后将这个结果再做一次映射。同时有5×14×14×6=5880个连接。
4、C3层-卷积层
输入:S2中所有6个或者几个特征map组合
卷积核大小:5×5
卷积核种类:16
输出featureMap大小:10×10 (14-5+1)=10
C3中的每个特征map是连接到S2中的所有6个或者几个特征map的,表示本层的特征map是上一层提取到的特征map的不同组合
存在的一个方式是:C3的前6个特征图以S2中3个相邻的特征图子集为输入。接下来6个特征图以S2中4个相邻特征图子集为输入。然后的3个以不相邻的4个特征图子集为输入。最后一个将S2中所有特征图为输入。
则:可训练参数:6×(3×5×5+1)+6×(4×5×5+1)+3×(4×5×5+1)+1×(6×5×5+1)=1516
连接数:10×10×1516=151600
详细说明:第一次池化之后是第二次卷积,第二次卷积的输出是C3,16个10×10的特征图,卷积核大小是 5×5. 我们知道S2 有6个 14×14 的特征图,怎么从6 个特征图得到 16个特征图了? 这里是通过对S2 的特征图特殊组合计算得到的16个特征图。具体如下:
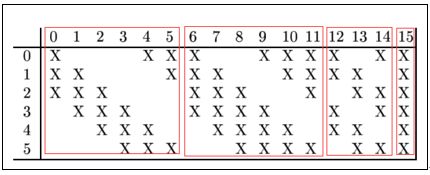
C3的前6个feature map(对应上图第一个红框的6列)与S2层相连的3个feature map相连接(上图第一个红框),后面6个feature map与S2层相连的4个feature map相连接(上图第二个红框),后面3个feature map与S2层部分不相连的4个feature map相连接,最后一个与S2层的所有feature map相连。卷积核大小依然为5×5,所以总共有6×(3×5×5+1)+6×(4×5×5+1)+3×(4×5×5+1)+1×(6×5×5+1)=1516个参数。而图像大小为10×10,所以共有151600个连接。
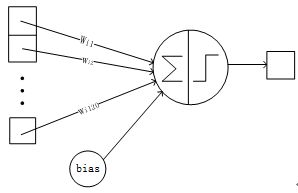
C3与S2中前3个图相连的卷积结构如下图所示:

上图对应的参数为 3×5×5+1,一共进行6次卷积得到6个特征图,所以有6×(3×5×5+1)参数。 为什么采用上述这样的组合了?论文中说有两个原因:1)减少参数,2)这种不对称的组合连接的方式有利于提取多种组合特征
5、S4层-池化层(下采样层)
输入:10×10
采样区域:2×2
采样方式:4个输入相加,乘以一个可训练参数,再加上一个可训练偏置。结果通过sigmoid
采样种类:16
输出featureMap大小:5×5(10/2)
神经元数量:5×5×16=400
连接数:16×(2×2+1)×5×5=2000
S4中每个特征图的大小是C3中特征图大小的1/4
详细说明:S4是pooling层,窗口大小仍然是2*2,共计16个feature map,C3层的16个10x10的图分别进行以2x2为单位的池化得到16个5x5的特征图。有5x5x5x16=2000个连接。连接的方式与S2层类似。
6、C5层-卷积层
输入:S4层的全部16个单元特征map(与s4全相连)
卷积核大小:5×5
卷积核种类:120
输出featureMap大小:1×1(5-5+1)
可训练参数/连接:120×(16×5×5+1)=48120
详细说明:C5层是一个卷积层。由于S4层的16个图的大小为5x5,与卷积核的大小相同,所以卷积后形成的图的大小为1x1。这里形成120个卷积结果。每个都与上一层的16个图相连。所以共有(5x5x16+1)x120 = 48120个参数,同样有48120个连接。C5层的网络结构如下: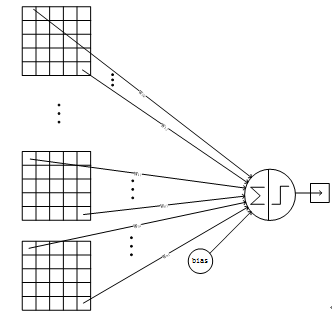
7、F6层-全连接层
输入:c5 120维向量
计算方式:计算输入向量和权重向量之间的点积,再加上一个偏置,结果通过sigmoid函数输出。
可训练参数:84×(120+1)=10164
详细说明:6层是全连接层。F6层有84个节点,对应于一个7x12的比特图,-1表示白色,1表示黑色,这样每个符号的比特图的黑白色就对应于一个编码。该层的训练参数和连接数是(120 + 1)x84=10164。ASCII编码图如下:
F6层的连接方式如下:
8、Output层-全连接层
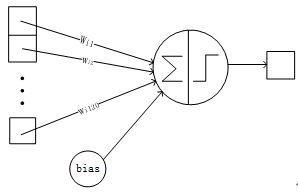
Output层也是全连接层,共有10个节点,分别代表数字0到9,且如果节点i的值为0,则网络识别的结果是数字i。采用的是径向基函数(RBF)的网络连接方式。假设x是上一层的输入,y是RBF的输出,则RBF输出的计算方式是:
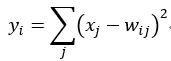
上式w_ij 的值由i的比特图编码确定,i从0到9,j取值从0到7*12-1。RBF输出的值越接近于0,则越接近于i,即越接近于i的ASCII编码图,表示当前网络输入的识别结果是字符i。该层有84x10=840个参数和连接。
四、Pytorch训练代码:
使用的数据集是MNIST,其中包括6万张28x28的训练样本,1万张测试样本。
import torch
import torchvision as tv
import torchvision.transforms as transforms
import torch.nn as nn
import torch.optim as optim
import argparse
# 定义是否使用GPU
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# 定义网络结构
class LeNet(nn.Module):
def __init__(self):
super(LeNet, self).__init__()
self.conv1 = nn.Sequential( #input_size=(1*28*28)
nn.Conv2d(1, 6, 5, 1, 2), #padding=2保证输入输出尺寸相同
nn.BatchNorm2d(6),
nn.ReLU(), #input_size=(6*28*28)
nn.MaxPool2d(kernel_size=2, stride=2),#output_size=(6*14*14)
)
self.conv2 = nn.Sequential(
nn.Conv2d(6, 16, 5),
nn.BatchNorm2d(16),
nn.ReLU(), #input_size=(16*10*10)
nn.MaxPool2d(2, 2) #output_size=(16*5*5)
)
self.fc1 = nn.Sequential(
nn.Linear(16 * 5 * 5, 120),
nn.ReLU()
)
self.fc2 = nn.Sequential(
nn.Linear(120, 84),
nn.ReLU()
)
self.fc3 = nn.Linear(84, 10)
# 定义前向传播过程,输入为x
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
# nn.Linear()的输入输出都是维度为一的值,所以要把多维度的tensor展平成一维
x = x.view(x.size()[0], -1)
x = self.fc1(x)
x = self.fc2(x)
x = self.fc3(x)
return x
#使得我们能够手动输入命令行参数,就是让风格变得和Linux命令行差不多
parser = argparse.ArgumentParser()
parser.add_argument('--outf', default='./model/', help='folder to output images and model checkpoints') #模型保存路径
parser.add_argument('--net', default='./model/net.pth', help="path to netG (to continue training)") #模型加载路径
opt = parser.parse_args()
# 超参数设置
EPOCH = 30 #遍历数据集次数
BATCH_SIZE = 64 #批处理尺寸(batch_size)
LR = 0.001 #学习率
# 定义数据预处理方式
transform = transforms.ToTensor()
# 定义训练数据集
trainset = tv.datasets.MNIST(
root='./data/',
train=True,
download=True,
transform=transform)
# 定义训练批处理数据
trainloader = torch.utils.data.DataLoader(
trainset,
batch_size=BATCH_SIZE,
shuffle=True,
)
# 定义测试数据集
testset = tv.datasets.MNIST(
root='./data/',
train=False,
download=True,
transform=transform)
# 定义测试批处理数据
testloader = torch.utils.data.DataLoader(
testset,
batch_size=BATCH_SIZE,
shuffle=False,
)
# 定义损失函数loss function 和优化方式(采用SGD)
net = LeNet().to(device)
criterion = nn.CrossEntropyLoss() # 交叉熵损失函数,通常用于多分类问题上
optimizer = optim.SGD(net.parameters(), lr=LR, momentum=0.9)
# 训练
if __name__ == "__main__":
for epoch in range(EPOCH):
sum_loss = 0.0
# 数据读取
for i, data in enumerate(trainloader):
inputs, labels = data
inputs, labels = inputs.to(device), labels.to(device)
# 梯度清零
optimizer.zero_grad()
# forward + backward
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# 每训练100个batch打印一次平均loss
sum_loss += loss.item()
if i % 100 == 99:
print('[%d, %d] loss: %.03f'
% (epoch + 1, i + 1, sum_loss / 100))
sum_loss = 0.0
# 每跑完一次epoch测试一下准确率
with torch.no_grad():
correct = 0
total = 0
for data in testloader:
images, labels = data
images, labels = images.to(device), labels.to(device)
outputs = net(images)
# 取得分最高的那个类
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum()
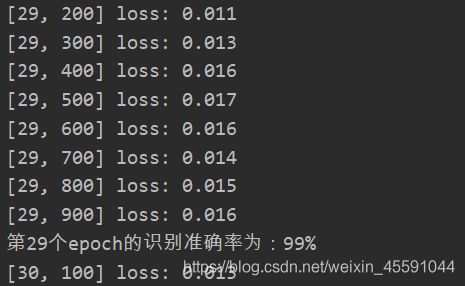
print('第%d个epoch的识别准确率为:%d%%' % (epoch + 1, (100 * correct / total)))
torch.save(net.state_dict(), '%s/net_%03d.pth' % (opt.outf, epoch + 1))
实验结果
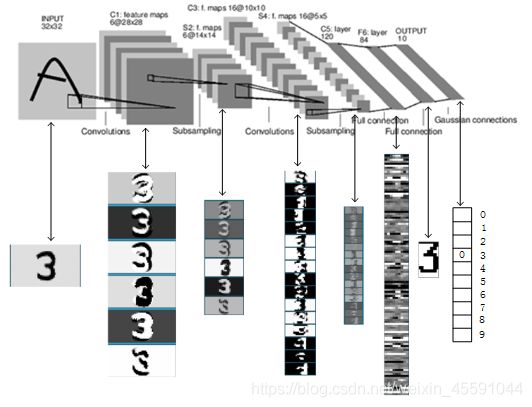
上图是LeNet-5识别数字3的过程。
五、总结
- LeNet-5是一种用于手写体字符识别的非常高效的卷积神经网络。
- 卷积神经网络能够很好的利用图像的结构信息。
- 卷积层的参数较少,这也是由卷积层的主要特性即局部连接和共享权重所决定。