cv2.copyMakeBorder()&cv2.warpAffine()&cv2.warpPerspective()
在跟踪里面,会需要完成如下的操作:
- 例如,在MDNet的里面,会在GT BBox周围crop下一些positive/negative examples, 然后进行resize和padding的操作,得到固定分辨率的patch|regions
- 例如在SiamFC|SiamFC++里面就会在上一帧目标位置进行crop和resize,得到search image
不难发现,对于目标跟踪问题,无论在train phase或者tracking phase,要得到patch,都要有crop->resize/padding的步骤,现在对于此实现进行总结:
cv2.copyMakeBorder()
在siamfc中,用的就是cv2.copyMakeBorder()函数:official link 和 usage example
dst = cv2.copyMakeBorder( src, top, bottom, left, right, borderType[, dst[, value]] )
- src:输入的图片
- top, bottom, left, right:需要在四个方向上填充的像素值
- borderType:填充边界的类型,一般使用固定值,如cv2.BORDER_CONSTANT
- dst: 输出的图片
- value:当borderType是cv2.BORDER_CONSTANT,需要指定填充的固定值是多少
当然这个函数只是单纯实现了在图片周围进行padding的操作,可以看下面的例子:
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('E:\\PycharmProjects\\py-MDNet-master\\datasets\\OTB\\MotorRolling\\img\\0001.jpg')
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # cv2 read PIL show
constant= cv2.copyMakeBorder(imgRGB,20,20,20,20,cv2.BORDER_CONSTANT,value=(255, 0, 0)) # red
plt.subplot(121),plt.imshow(imgRGB),plt.title('ORIGINAL')
plt.subplot(122),plt.imshow(constant),plt.title('CONSTANT')
plt.show()
可以得到:

所以还得配合其他的来实现crop和resize,如siamfc中的crop_and_resize函数:
def crop_and_resize(img, center, size, out_size,
border_type=cv2.BORDER_CONSTANT,
border_value=(0, 0, 0),
interp=cv2.INTER_LINEAR):
# convert box to corners (0-indexed)
size = round(size)
corners = np.concatenate((
np.round(center - (size - 1) / 2),
np.round(center - (size - 1) / 2) + size))
corners = np.round(corners).astype(int)
# pad image if necessary
pads = np.concatenate((
-corners[:2], corners[2:] - img.shape[:2]))
npad = max(0, int(pads.max()))
if npad > 0:
img = cv2.copyMakeBorder(
img, npad, npad, npad, npad,
border_type, value=border_value)
# crop image patch
corners = (corners + npad).astype(int)
patch = img[corners[0]:corners[2], corners[1]:corners[3]]
# resize to out_size
patch = cv2.resize(patch, (out_size, out_size),
interpolation=interp)
return patch
cv2.warpAffine()
这个是在SiamFC++中使用过,在get_subwindow_tracking函数中被调用:
def get_subwindow_tracking(im,
pos,
model_sz,
original_sz,
avg_chans=(0, 0, 0),
mask=None):
r"""
Get subwindow via cv2.warpAffine
Arguments
---------
im: numpy.array
original image, (H, W, C)
pos: numpy.array
subwindow position
model_sz: int
output size
original_sz: int
subwindow range on the original image
avg_chans: tuple
average values per channel
mask: numpy.array
mask, (H, W)
Returns
-------
numpy.array
image patch within _original_sz_ in _im_ and resized to _model_sz_, padded by _avg_chans_
(model_sz, model_sz, 3)
"""
crop_cxywh = np.concatenate(
[np.array(pos), np.array((original_sz, original_sz))], axis=-1)
crop_xyxy = cxywh2xyxy(crop_cxywh)
# warpAffine transform matrix
M_13 = crop_xyxy[0]
M_23 = crop_xyxy[1]
M_11 = (crop_xyxy[2] - M_13) / (model_sz - 1) # w/output_size
M_22 = (crop_xyxy[3] - M_23) / (model_sz - 1) # h/output_size
mat2x3 = np.array([M_11, 0, M_13, 0, M_22, M_23,]).reshape(2, 3)
im_patch = cv2.warpAffine(im,
mat2x3, (model_sz, model_sz),
flags=(cv2.INTER_LINEAR | cv2.WARP_INVERSE_MAP),
borderMode=cv2.BORDER_CONSTANT,
borderValue=tuple(map(int, avg_chans)))
if mask is not None:
mask_patch = cv2.warpAffine(mask,
mat2x3, (model_sz, model_sz),
flags=(cv2.INTER_NEAREST
| cv2.WARP_INVERSE_MAP))
return im_patch, mask_patch
return im_patch
这时就得去官网查一查cv2.warpAffine()函数的用法:official link 和 usage example:
cv2.warpAffine(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]]) → dst
- src:输入的图片
- M:affine transformation matrix(2*3)
- dsize:输出图片的大小(W*H)
- dst:输出的图片
- flags:插值的类型,如cv2.INTER_LINEAR,如果加上cv2.WARP_INVERSE_MAP,则使用这个对应关系: dst ( x , y ) = src ( M 11 x + M 12 y + M 13 , M 21 x + M 22 y + M 23 ) \operatorname{dst}(x, y)=\operatorname{src}\left(M_{11} x+M_{12} y+M_{13}, M_{21} x+M_{22} y+M_{23}\right) dst(x,y)=src(M11x+M12y+M13,M21x+M22y+M23)
- borderMode:和bordeType一样,如cv2.BORDER_CONSTANT
- borderValue:当borderMode是cv2.BORDER_CONSTANT,需要指定填充的固定值是多少

这里面的关系和具体做了什么还是很难一下子搞懂【可以先看看那个usage example里面平移,旋转,仿射,透视变换的例子用法】,再看下面的例子:
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('E:\\PycharmProjects\\py-MDNet-master\\datasets\\OTB\\MotorRolling\\img\\0001.jpg')
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
rows, cols = imgRGB.shape[:2] # (360, 640)
# print("img shape: ", img.shape)
# cv2.WARP_INVERSE_MAP
M1 = np.float32([[1, 0, 100], [0, 1, 50]])
M2 = np.float32([[2, 0, 100], [0, 1, 50]])
dst1 = cv2.warpAffine(imgRGB, M1, (cols,rows), flags=cv2.INTER_LINEAR)
dst2 = cv2.warpAffine(imgRGB, M2, (cols,rows), flags=cv2.INTER_LINEAR)
dst3 = cv2.warpAffine(imgRGB, M1, (cols,rows), flags=(cv2.INTER_LINEAR | cv2.WARP_INVERSE_MAP))
dst4 = cv2.warpAffine(imgRGB, M2, (cols,rows), flags=(cv2.INTER_LINEAR | cv2.WARP_INVERSE_MAP))
M3 = np.float32([[0.5, 0, 100], [0, 1, 50]])
dst5 = cv2.warpAffine(imgRGB, M3, (cols,rows), flags=(cv2.INTER_LINEAR | cv2.WARP_INVERSE_MAP))
fig = plt.figure('subplot demo')
ax1 = fig.add_subplot(3, 2, 1), plt.imshow(imgRGB), plt.title('Original', fontsize=7)
ax2 = fig.add_subplot(3, 2, 2), plt.imshow(dst1), plt.title('Translation', fontsize=7)
ax3 = fig.add_subplot(3, 2, 3), plt.imshow(dst2), plt.title('Expand + Translation', fontsize=7)
ax4 = fig.add_subplot(3, 2, 4), plt.imshow(dst3), plt.title('Inverse Translation', fontsize=7)
ax5 = fig.add_subplot(3, 2, 5), plt.imshow(dst4), plt.title('Shrink + Inverse Translation', fontsize=7)
ax6 = fig.add_subplot(3, 2, 6), plt.imshow(dst5), plt.title('Expand + Inverse Translation', fontsize=7)
plt.tight_layout()
plt.show()
得到如下结果:

通过这几幅图可以总结一下:
- 当flags中无cv2.WARP_INVERSE_MAP时:
- 平移从左上角往右下角平移, M 13 M_{13} M13为 x x x平移量, M 23 M_{23} M23为 y y y平移量
- M 11 M_{11} M11为 x x x缩放量, M 22 M_{22} M22为 y y y缩放量,是乘以此处的缩放因子
- 平移量和缩放量是互相独立的,不会互相影响
- 当flags中有cv2.WARP_INVERSE_MAP时:
- 平移从右下角往左上角平移, M 13 M_{13} M13为 x x x平移量, M 23 M_{23} M23为 y y y平移量
- M 11 M_{11} M11为 x x x缩放量, M 22 M_{22} M22为 y y y缩放量,是除以此处的缩放因子
- 平移量是会被缩放的,所以缩放量和平移量是互相影响的
其实只要记住怎么用就行,就像上面那样,可以得到下面的demo:
import cv2
import numpy as np
from matplotlib import pyplot as plt
context_amount = 0.5
z_size = 127
def cxywh2xyxy(box):
box = np.array(box, dtype=np.float32)
return np.concatenate([
box[..., [0]] - (box[..., [2]] - 1) / 2, box[..., [1]] -
(box[..., [3]] - 1) / 2, box[..., [0]] +
(box[..., [2]] - 1) / 2, box[..., [1]] + (box[..., [3]] - 1) / 2
],
axis=-1)
img_path = 'E:\\PycharmProjects\\py-MDNet-master\\datasets\\OTB\\MotorRolling\\img\\0001.jpg'
gt_path = 'E:\\PycharmProjects\\py-MDNet-master\\datasets\\OTB\\MotorRolling\\groundtruth_rect.txt'
img = cv2.imread(img_path, cv2.IMREAD_COLOR)
avg_chans = np.mean(img, axis=(0, 1))
with open(gt_path) as f:
gt = np.loadtxt((x.replace('\t', ',') for x in f), delimiter=',')
box = gt[0] # xywh
wt, ht = box[2:]
wt_ = wt + context_amount * (wt + ht)
ht_ = ht + context_amount * (wt + ht)
st = np.sqrt(wt_ * ht_)
cx = box[0] + (box[2] - 1) / 2
cy = box[1] + (box[3] - 1) / 2
# print(tuple(map(int, [box[0]+box[2], box[1]+box[3]])))
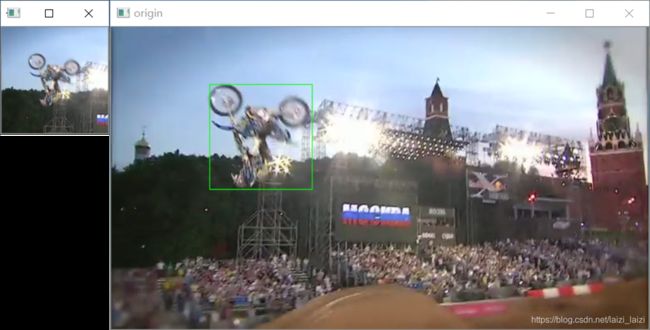
patch = get_subwindow_tracking(img, pos=(cx, cy), model_sz=z_size, original_sz=st, avg_chans=avg_chans)
cv2.rectangle(img, pt1=tuple(map(int, box[:2])), pt2=tuple(map(int, [box[0]+box[2], box[1]+box[3]])), color=(0,255,0))
cv2.imshow("origin", img)
cv2.imshow("patch", patch)
cv2.waitKey(0)
cv2.destroyAllWindows()

分割线:2020/08/06更新:另一个跟踪框架级代码pysot里面也在函数_crop_roi中使用了cv2.warpAffine(),但是和SiamFC++写法不同,但是效果是一样的,这里放一下_crop_roi:
其实这里的输入bbox也就是get_subwindow_tracking中的crop_xyxy
def _crop_roi(image, bbox, out_sz, padding=(0, 0, 0)):
# bbox area you want to crop, format: xyxy
bbox = [float(x) for x in bbox]
a = (out_sz - 1) / (bbox[2] - bbox[0]) # output_size/w
b = (out_sz - 1) / (bbox[3] - bbox[1]) # output_size/h
c = -a * bbox[0]
d = -b * bbox[1]
mapping = np.array([[a, 0, c],
[0, b, d]]).astype(np.float)
crop = cv2.warpAffine(image, mapping, (out_sz, out_sz),
borderMode=cv2.BORDER_CONSTANT,
borderValue=padding)
return crop
因为没有用cv2.WARP_INVERSE_MAP这个flag,所以矩阵affine transformation matrix(2*3) M不一样,但是效果是一模一样,所以以后可以二选一,当作模板就行了:
cv2.warpPerspective()
其相关参数和cv2.warpAffine函数的类似,可以说cv2.warpAffine是cv2.warpPerspective()的子集。只不过它的affine transformation matrix是3*3的,最下面一行就是[0, 0, 1],效果是一样的,不再赘述。提供一下:official link 和 usage example:
References
- python的cv2.warpAffine()和cv2.warpPerspective()解析对比