muduo库分析——base篇(4) Thread
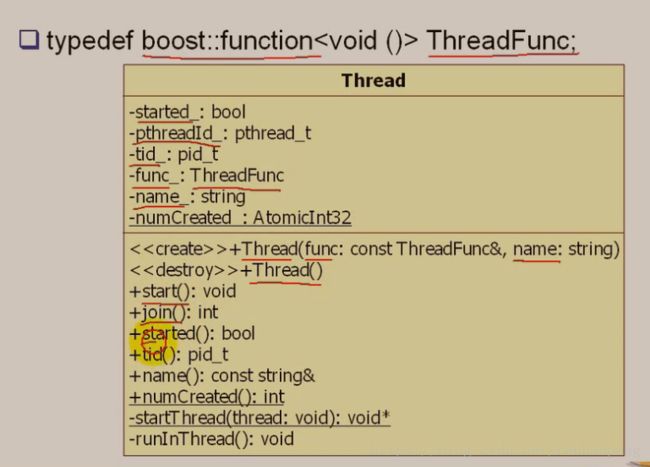
线程管理对象,本身携带进程tid,需要执行的函数
头文件:
typedef boost::function ThreadFunc; //无参数无返回线程函数
explicit Thread(const ThreadFunc&, const string& name = string()); //别名防止拷贝函数
CountDownLatch latch_; //用于多线程等待满足条件后同时工作
static AtomicInt32 numCreated_; //原子计数器,记录线程个数
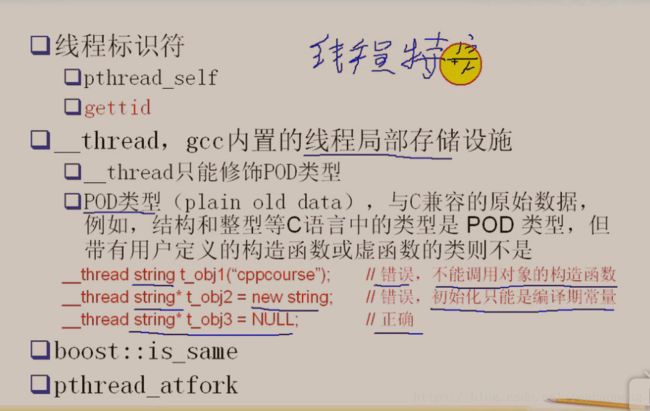
在CurrentThread命名空间中定义了线程私有资源,用于储存线程相关id,日志数据,名字等等
cpp文件:
namespace CurrentThread
{
__thread int t_cachedTid = 0; //线程私有资源,tid
__thread char t_tidString[32];
__thread int t_tidStringLength = 6;
__thread const char* t_threadName = "unknown";
const bool sameType = boost::is_same::value; //判断是否int==pid_t
BOOST_STATIC_ASSERT(sameType);
} pid_t gettid()
{
return static_cast(::syscall(SYS_gettid)); //获取当前pid(系统调用)
}
void afterFork()
{
//调用Fork后的回调函数
muduo::CurrentThread::t_cachedTid = 0; //当前tid设为0,同时调用Fork的线程成为主线程
//其他线程不会复制,锁的状态会复制
muduo::CurrentThread::t_threadName = "main";
//修改线程私有资源的当前tid
CurrentThread::tid();
// no need to call pthread_atfork(NULL, NULL, &afterFork);
}
class ThreadNameInitializer
{
public:
ThreadNameInitializer()
{
//默认调用一次,同时设置好fork时函数(一般多线程不fork)
muduo::CurrentThread::t_threadName = "main";
CurrentThread::tid();
pthread_atfork(NULL, NULL, &afterFork);
}
}; ThreadNameInitializer init;//调用
struct ThreadData
{
//每一个线程对象调用一个ThreadData,主要用于解耦,方便方法和数据绑定后传输
typedef muduo::Thread::ThreadFunc ThreadFunc;
ThreadFunc func_;
string name_;
pid_t* tid_; //指针指向tid
CountDownLatch* latch_;
ThreadData(const ThreadFunc& func,
const string& name,
pid_t* tid,
CountDownLatch* latch)
: func_(func),
name_(name),
tid_(tid),
latch_(latch)
{ }void runInThread()
//指向tid后修改,再清零指针,内存已经修改好,线程对象仍然持有指针void CurrentThread::cacheTid() //储存一次tidbool CurrentThread::isMainThread()//判断thread是否属于当前线程void CurrentThread::sleepUsec(int64_t usec) //线程睡眠
{
struct timespec ts = { 0, 0 }; //系统调用所需结构体
ts.tv_sec = static_cast(usec / Timestamp::kMicroSecondsPerSecond);
ts.tv_nsec = static_cast(usec % Timestamp::kMicroSecondsPerSecond * 1000);
::nanosleep(&ts, NULL);
} Thread::~Thread()
{
if (started_ && !joined_) //判断是否在运行中并且没有使用join
{
pthread_detach(pthreadId_);//线程运行后自动销毁(非阻塞)
}
}int num = numCreated_.incrementAndGet(); //原子加一后返回值void Thread::start()
{
assert(!started_);
started_ = true; //更改状态,运行中
// FIXME: move(func_)
detail::ThreadData* data = new detail::ThreadData(func_, name_, &tid_, &latch_);
if (pthread_create(&pthreadId_, NULL, &detail::startThread, data)) //创建线程,将ThreadData进行绑定
{
started_ = false;
delete data; // or no delete?
LOG_SYSFATAL << "Failed in pthread_create";
}
else
{
latch_.wait();
assert(tid_ > 0);
}
}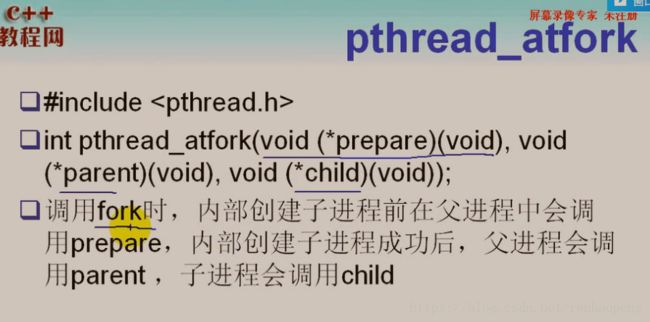
多线程调用fork函数可能导致死锁,因为锁的状态会复制,但是线程只会复制调用fork的线程,其他线程不会复制