Ubuntu18.04 opencv3.4.4 分水岭的粘连对象分割(转)
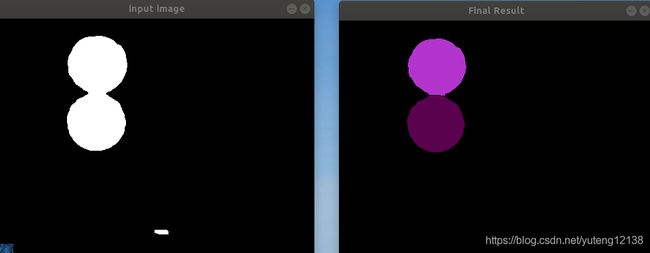
在交通标志识别的过程中,经常会遇到互相粘连的交通标志,利用分水岭算法能够很到的解决。


/*
读取图像,将原图上进行pyrMeanShiftFiltering()处理,保留更多的边缘信息,
在平滑区进行滤波,保证后面二值化时的效果更好,
转成单通道,二值处理,进行距离变换,将距离变换的结果归一化,找到山峰
再一次进行二值化处理,转到CV_8U类型的图像
进行轮廓发现,绘制轮廓,每次绘制轮廓时用不同的值对每个轮廓进行标记
关键:画一个圆作为标记这个不理解
对原图形态学腐蚀,去除干扰
使用watershed函数,得到maskers
根据masker中的像素值,索引颜色填充
*/
#include参考资料:
https://blog.csdn.net/CJ_035/article/details/81843298
https://blog.csdn.net/qq_24946843/article/details/82823108