matlabTDOA定位
文章目录
- 一、要求
- 二、原理
- 三、chan算法代码
- 四、Taylor算法代码
- 五、结果
- 六、结论
- 七、主函数代码
一、要求
要求一:编写两个函数TDOA_CHAN和TDOA_Taylor得到位置的估计。
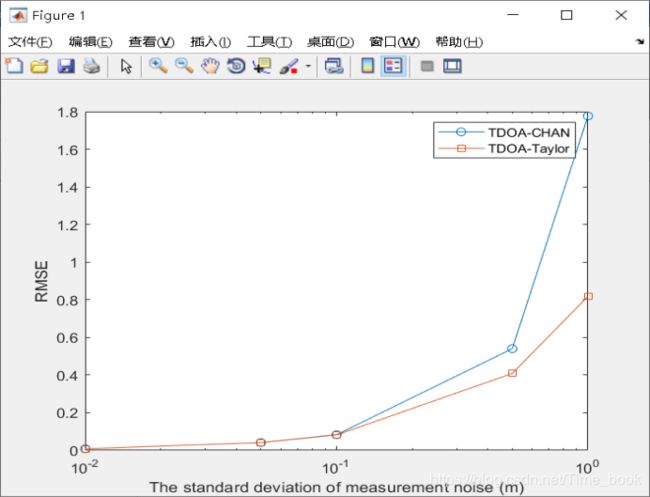
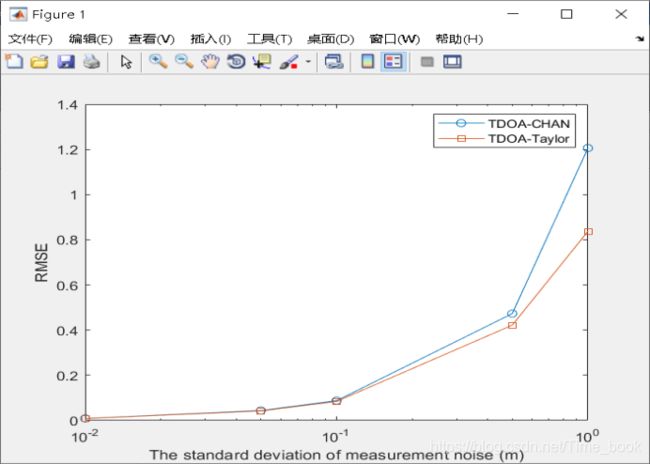
要求二:用RMSE实现两种算法的性能比较, 得到两种算法的RMSE曲线对比图,横坐标为噪声方差,纵坐标为RMSE。
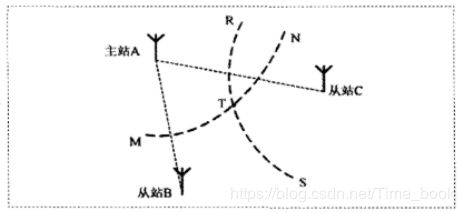
二、原理
TDOA是一种利用时间差进行定位的方法。通过某一被测信号源的位置发送无线信号到达不同基站的时间差得到被测信号达到监测站的距离,进而确定信号的位置。
三、chan算法代码
function theta=TDOACHAN(A,p,sigma)
[m,~]=size(A);
k=sum(A.^2,2);
G1=[A(2:end,:)-ones(m-1,1)*A(1,:),p];
h1=1/2*(p.^2-k(2:end,:)+ones(m-1,1)*k(1,:)); %构建矩阵h
Q=diag(ones(m-1,1)*sigma); %构建TDOA的协方差矩阵
theta0=inv(G1'*inv(Q)*G1)*G1'*inv(Q)*h1; %通过一次WLS算法进行求解,
s=A(2:end,:)-ones(m-1,1)*theta0(1:2,:)';
d=sum(s.^2,2);
B1=diag(d.^(1/2));
cov1=B1*Q*B1;
% first wls
theta1=inv(G1'*inv(cov1)*G1)*G1'*inv(cov1)*h1; %进行第一次WLS计算
cov_theta1=inv(G1'*inv(cov1)*G1); %得到theta1的协方差矩阵
% second wls
G2=[1,0;0,1;1,1]; %构建G'
h2=[(theta1(1,1)-A(1,1))^2;(theta1(2,1)-A(1,2))^2;theta1(3,1)^2]; %构建h'
B2=diag([theta1(1,1)-A(1,1),theta1(2,1)-A(1,2),theta1(3,1)]); %构建b'
cov2=4*B2*cov_theta1*B2; %得到误差矢量的协方差矩阵。
theta2=inv(G2'*inv(cov2)*G2)*G2'*inv(cov2)*h2; %运用最大似然估计得到
theta=theta2.^(1/2)+[A(1,1);A(1,2)]; %得到MS位置的估计值坐标,以及符号
theta=theta';%转换为(x,y)形式
四、Taylor算法代码
function theta=TDOATaylor(A,p,sigma)
theta0=TDOACHAN(A,p,sigma); %调用TDOACHAN得到一个初始的估计位置
delta=norm(theta0); %得到范数
while norm(delta)>1e-2 %得到足够小的值
[m,~]=size(A);
d=sum((A-ones(m,1)*theta0).^2,2);
R=d.^(1/2);
G1=ones(m-1,1)*(A(1,1)-theta0(1,1))/R(1,1)-(A(2:m,1)-theta0(1,1))./R(2:m,:); G2=ones(m-1,1)*(A(1,2)-theta0(1,2))/R(1,1)-(A(2:m,2)-theta0(1,2))./R(2:m,:);
G=[G1,G2]; %构建Gt
h=p-(R(2:m,:)-ones(m-1,1)*R(1,:)); %构建Ht
Q=diag(ones(m-1,1)*sigma); %TDOA测量值的协方差矩阵
delta=inv(G'*inv(Q)*G)*G'*inv(Q)*h; %加权最小二乘解
theta0=theta0+delta';
end
theta=theta0;
五、结果
移动台初始位置(200,200)
移动台初始位置(300,300)
六、结论
chan算法是一种非递归算法,不需要初值,仅两次迭代就可得到最终结果,计算简单。Taylor算法是一种需要初始值的递归算法,适用于各种信道环境,但计算量大,由于实验用到的初始数据是基于chan算法的结果而进行的,所以Taylor算法优于chan算法,若单独使用某一种算法,定位效果并不会太好,所以将两种算法结合会使得定位精度更加准确。
七、主函数代码
clear all;
clc;
%定义四个参与基站的坐标位置
BS1=[0,0];
BS2=[500,0];
BS3=[500,500];
BS4=[0,500];
MS=[200,200];
std_var=[1e-2,5e-2,1e-1,5e-1,1]; %范围
A=[BS1;BS2;BS3;BS4];
number=10000;
for j=1:length(std_var) %循环
error1=0;%初始误差置为0
error2=0; %初始误差置为0
std_var1=std_var(j);%令std_var1等于当前数组的值
for i=1:number %多次循环
r1=A-ones(4,1)*MS;
r2=(sum(r1.^2,2)).^(1/2);
%r=r2(2:end,:)-ones(3,1)*r2(1,:)+std_var1*randn(3,1); %表示从[2,i]开始MS与基站i和基站1的距离差
r=r2(2:end,:)-ones(3,1)*r2(1,:)+std_var1*randn(3,1);
sigma=std_var1^2;
theta1=TDOACHAN(A,r,sigma); % 调用TDOACHAN函数
theta2=TDOATaylor(A,r,sigma); %调用TDOATalor函数
error1=error1+norm(MS-theta1)^2; %移动台MS估计位置与计算的到的距离的平方
error2=error2+norm(MS-theta2)^2; %移动台MS估计位置与计算的到的距离的平方
end
RMSE1(j)=(error1/number)^(1/2); %均方根误差
RMSE2(j)=(error2/number)^(1/2); %均方根误差
end
% plot
semilogx(std_var,RMSE1,'-O',std_var,RMSE2,'-s')% x轴取对数,X轴范围是1e-2到1,Y轴的范围是变动的
xlabel('The standard deviation of measurement noise (m)');
ylabel('RMSE');
legend('TDOA-CHAN','TDOA-Taylor');