Intel Realsense T265开箱测试
前言:最近因为要做VIO,在实验室蹭到一个Realsense T265来用,仅此记录下简单测试过程。(官方文档写非常清楚,建议详细阅读,链接:https://github.com/IntelRealSense/librealsense)
一:测试环境
远古电脑:Thinkpad E430 Memory : 8G Processor:Intel® Core™ i5-3230M CPU @ 2.60GHz × 4 Graphics:GeForce 610M/PCIe/SSE2
系统版本:Ubuntu 16.04 LTS 64位
传感器:Realsense T265集成高精度VI-SLAM算法;内部带有VPU,可以在极低功耗下运行VI-SLAM;两个163±5°FOV的鱼眼镜头;IMU是BMI055;接口支持USB2.0和3.1。(附官网链接:https://www.intelrealsense.com/tracking-camera-t265)
二:SDK安装过程
1:通过apt-get安装
首先还是贴出官方给出的教程链接:https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md#installing-the-packages
1)注册服务器的公钥:
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
2)添加服务器列表(注:该指令为Ubuntu 16下指令,Ubuntu 18的有些许不同):
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
3)安装所需的库:
sudo apt-get install librealsense2-dkms (深度相机专用内核扩展的DKMS软件包)sudo apt-get install librealsense2-utils (RealSense™SDK提供的一部分demo和工具)
4)开发者开发调试用的包(可选):
sudo apt-get install librealsense2-dev (开发者所要用到的头文件和链接符号)sudo apt-get install librealsense2-dbg (开发者debug用到)
5)显示执行:
realsense-viewer
注:在官网链接中还给出了升级和卸载软件包的指令。
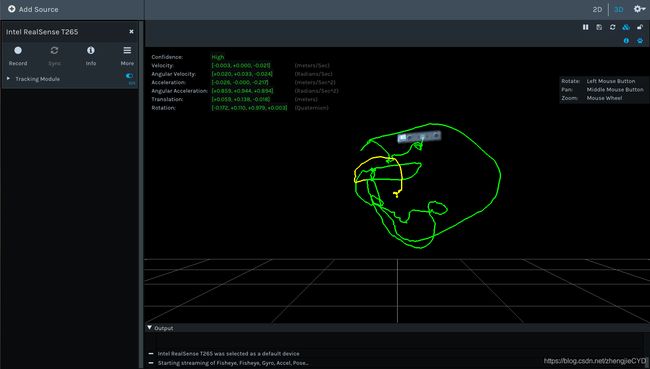
如下是连接成果后的效果图,左边是2D显示,右边是3D的轨迹。在轨迹颜色中黄色为信任度中等的轨迹,绿色为较高信任度。

室内轨迹简单测试:

室内轨迹的总长度在45米左右,因为图上没有ground trouth和尺度单位,所以没法具体的评价精度。但是Tracking的数据可以读取出来,后续可进一步分析其定位精度。
2:通过源码包编译安装
注:该部分自己没有实际操作,具体可参考这位大佬的博客:https://blog.csdn.net/u012177641/article/details/88239498
官网说明链接:https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md
三:realsense-ros安装
使用该相机的初衷是要做VIO算法研究,因此需要相机的原始图像信息和IMU信息。官方提供了ROS包以供开发者能够进一步的研究使用该相机。该ROS包的官方链接为:https://github.com/IntelRealSense/realsense-ros 在readme文档中也详细说明了包的安装使用方法。
在安装好realsense 的SDK后,进行如下指令操作(前提需要ros):
1)进入自己的工作空间:cd catkin_ws/src
2)克隆源码:git clone https://github.com/IntelRealSense/realsense-ros.git
3)这里需要注意的地方是:如果前面SDK包的安装是通过apt-get安装的话,很可能有个名为ddynamic_reconfigure的包没有安装上,可以使用rospack list 查看自己电脑中是否有。(注意这个包的名字是ddynamic_reconfigure,而不是dynamic_reconfigure。因为我自己在检查时,电脑中有dynamic_reconfigure这个包,以为是一样的就没有装,结果后续进行realsense-ros包编译时会出现没有ddynamic_reconfigure包支持的错误。)
上述安装包的链接为:https://github.com/pal-robotics/ddynamic_reconfigure/tree/kinetic-devel
将安装包克隆到该工作空间的src文件下,进行编译安装即可。
4)进一步回到工作空间目录编译:catkin_make
在realsense-ros包的launch文件夹下有许多对应的lancuh文件,这里执行:
roslaunch realsense2_camera rs_t265.launch
(1)通过rostopic list查看发布的话题

(2)通过rosrun rviz rviz 查看图像

到这里就完成了对T265的基本测试,接下来就是对IMU,双目鱼眼相机的标定以及联合标定。
补充:
1)上述的安装测试过程是在网络已经代理的情况下进行,因此不太清楚网络不代理的情况下会出现什么问题。
2)同时该安装过程是在自己的电脑上进行,仅供参考。